欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (1): 117-126.DOI: 10.3969/j.issn.1674-8484.2025.01.012
张立成( ), 押境田, 彭琨, 杨冉
), 押境田, 彭琨, 杨冉
收稿日期:2024-09-03
修回日期:2024-10-11
出版日期:2025-02-28
发布日期:2025-03-04
作者简介:张立成(1987—),男(汉),江苏,高级工程师。E-mail:lichengzhang@chd.edu.cn。
基金资助:
ZHANG Licheng(), YA Jingtian, PENG Kun, YANG Ran
Received:2024-09-03
Revised:2024-10-11
Online:2025-02-28
Published:2025-03-04
摘要:
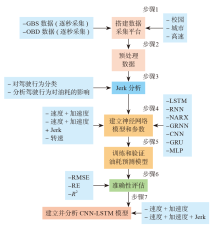
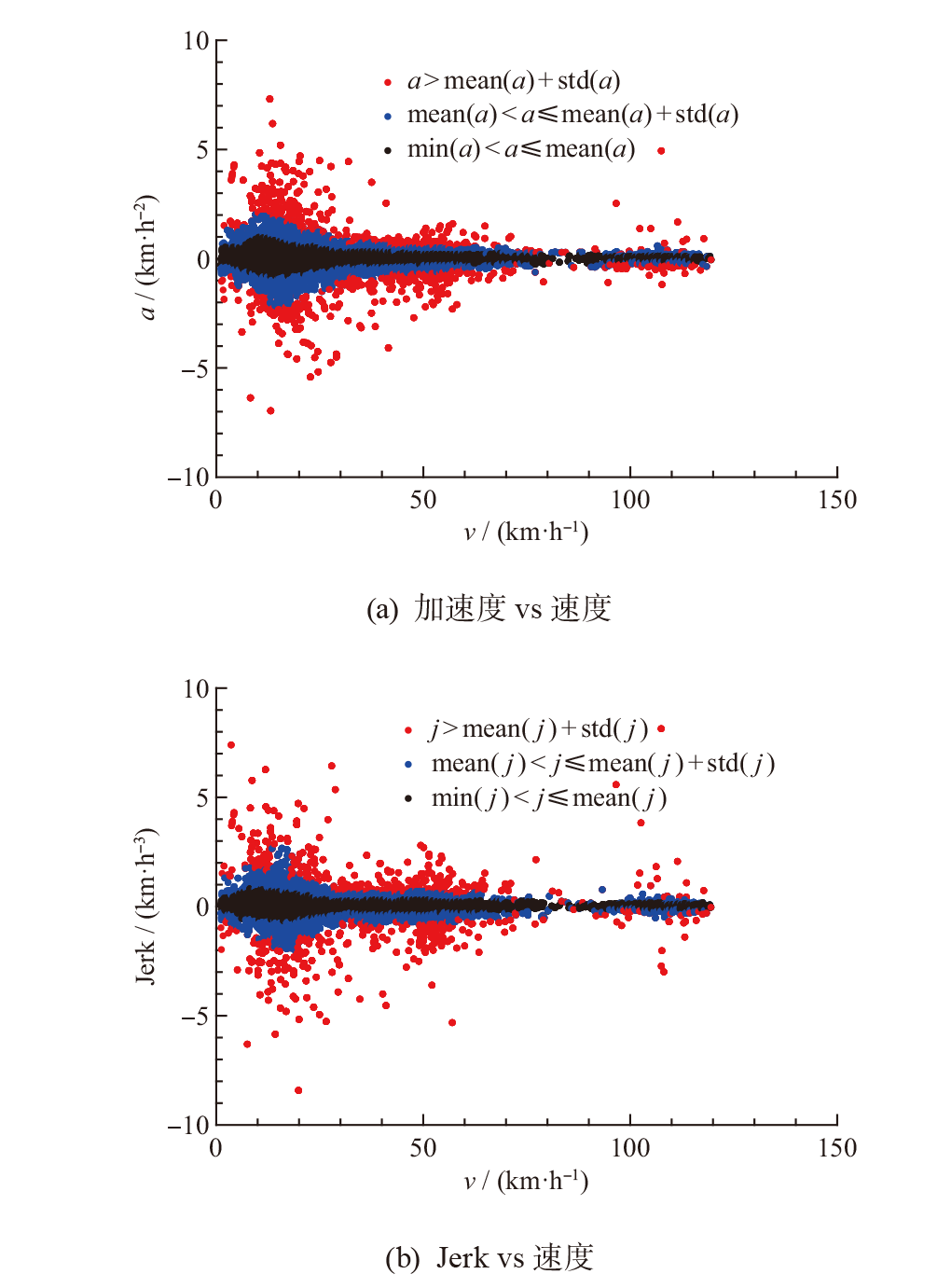
为了研究精细驾驶行为对基于单个和混合神经网络的油耗模型预测性能的影响,选择车辆急动度(Jerk)作为神经网络训练输入的重要变量。采用长短期记忆网络(LSTM)、循环神经网络(RNN)、非线性自回归带外部输入模型(NARX)、广义回归神经网络(GRNN)、卷积神经网络(CNN)、门控循环单元(GRU)、多层感知机(MLP) 以及卷积神经-长短期记忆网络(CNN-LSTM)混合神经网络共 8 种典型神经网络模型,选取(速度,加速度)、(速度,加速度和Jerk)、(发动机转速)共 3 种输入参数组合,以及校园低速、城市中速和高速公路高速共3种速度工况,累计进行了 69 组实验。结果表明:相较其余 6 种单个神经网络模型,LSTM 模型在各输入组合和各速度工况下的预测性能最好;CNN-LSTM混合模型的预测性能略优于 LSTM 模型。引入车辆急动度(Jerk)后,各神经网络油耗预测模型在各速度工况的预测性能都得到显著提高,其中,单个模型中,RMSE 最高下降了43.2%(CNN网络,高速路况),RE 最高下降了68.2%(LSTM网络,城市路况),R2 最高提升了 41.8%(NARX网络,城市路况);混合模型中,RMSE 和 RE 分别最高下降了 34.9% 和 61.0%(城市路况)。
中图分类号:
张立成, 押境田, 彭琨, 杨冉. 车辆急动度对神经网络油耗预测性能影响研究[J]. 汽车安全与节能学报, 2025, 16(1): 117-126.
ZHANG Licheng, YA Jingtian, PENG Kun, YANG Ran. Impact of Jerk on neural network based fuel consumption predicting models[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 117-126.


| 输入 | 校园 | 城市 | 高速公路 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | |||
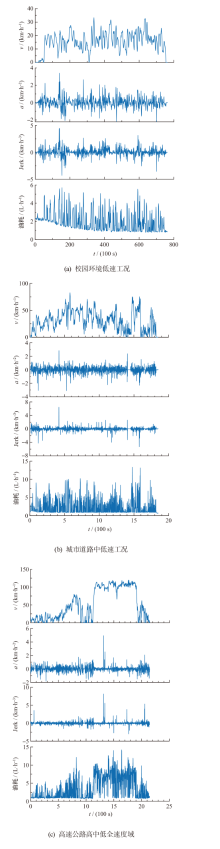
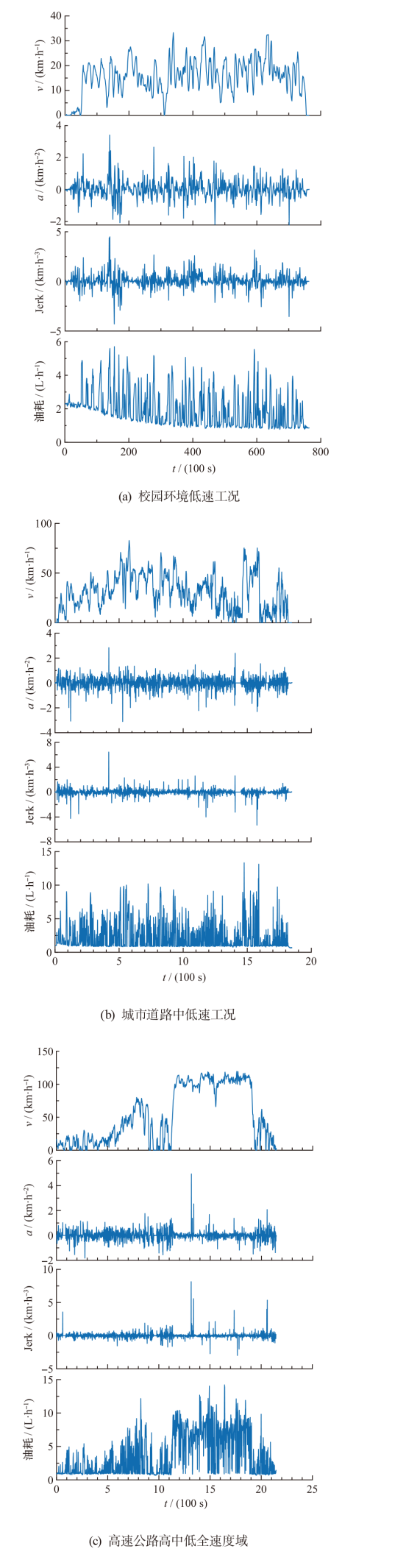
| 平均值 | 15.48 | 0.04 | 0.67 | 30.76 | 1.52×10-4 | -0.01 | 53.26 | 0.01 | 0.01 | ||
| 最大值 | 33.28 | 3.41 | 4.49 | 82.72 | 2.83 | 6.44 | 119.49 | 4.94 | 8.14 | ||
| 最小值 | 0.01 | -2.22 | -4.29 | 0.00 | -3.10 | -5.31 | 0.00 | -1.82 | -2.99 | ||
| 方差 | 49.97 | 0.34 | 0.59 | 311.60 | 0.20 | 0.24 | 1.80×103 | 0.12 | 0.17 | ||
| 输入 | 校园 | 城市 | 高速公路 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | v / (km·h-1) | a / (km·h-2) | Jerk / (km·h-3) | |||
| 平均值 | 15.48 | 0.04 | 0.67 | 30.76 | 1.52×10-4 | -0.01 | 53.26 | 0.01 | 0.01 | ||
| 最大值 | 33.28 | 3.41 | 4.49 | 82.72 | 2.83 | 6.44 | 119.49 | 4.94 | 8.14 | ||
| 最小值 | 0.01 | -2.22 | -4.29 | 0.00 | -3.10 | -5.31 | 0.00 | -1.82 | -2.99 | ||
| 方差 | 49.97 | 0.34 | 0.59 | 311.60 | 0.20 | 0.24 | 1.80×103 | 0.12 | 0.17 | ||

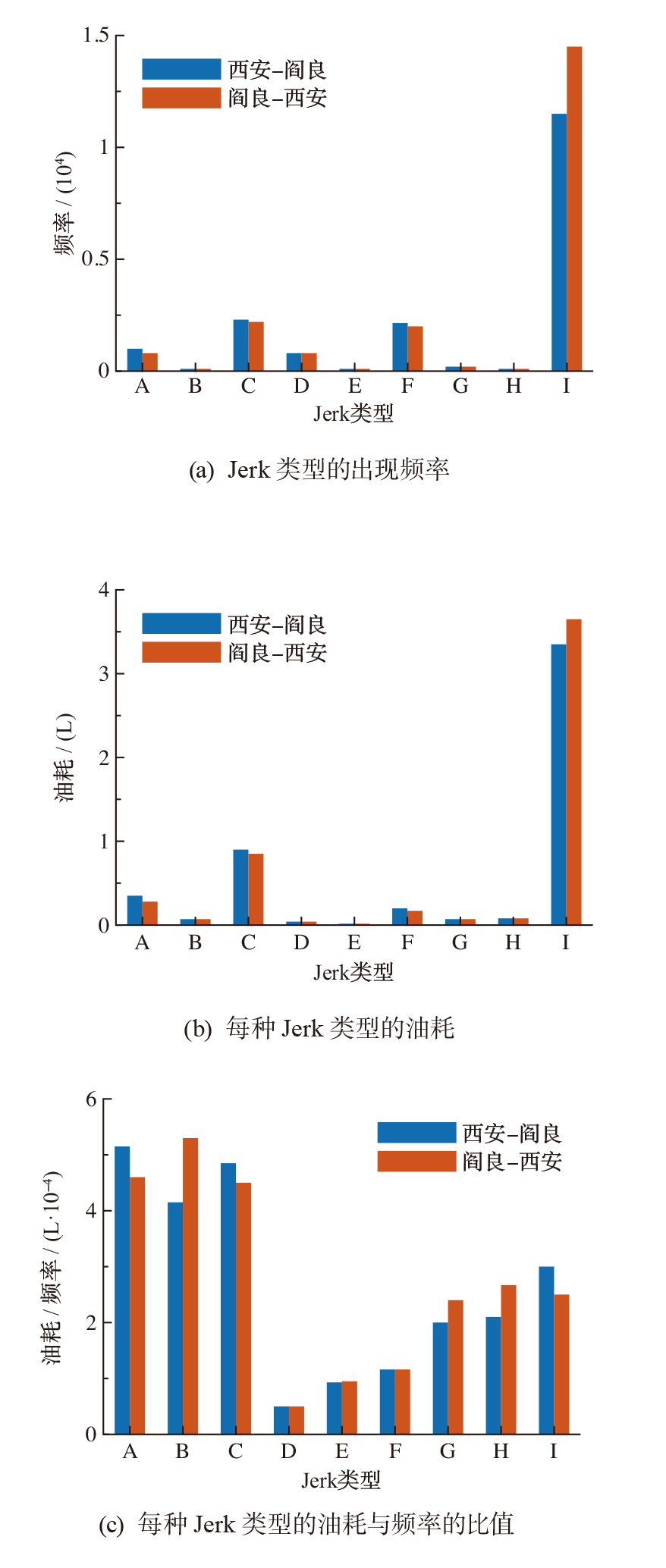
| 类型 | ai | ai + 1 | ai与ai + 1 | Jerk | 语言描述 |
|---|---|---|---|---|---|
| type A | > 0 | > 0 | ai = ai + 1 | 0 | 匀加速 |
| type B | > 0 | > 0 | ai > ai + 1 | < 0 | 加速度减小的加速 |
| type C | > 0 | > 0 | ai < ai + 1 | > 0 | 加速度增大的加速 |
| type D | < 0 | < 0 | ai = ai + 1 | 0 | 匀减速 |
| type E | < 0 | < 0 | ai < ai + 1 | > 0 | 减速度增大的减速 |
| type F | < 0 | < 0 | ai > ai + 1 | < 0 | 减速度减小的减速 |
| type G | > 0 | < 0 | ai > ai + 1 | < 0 | 先加速后减速 |
| type H | < 0 | > 0 | ai < ai + 1 | > 0 | 先减速后加速 |
| type I | / | 0 | / | / | 匀速行为 |
| 类型 | ai | ai + 1 | ai与ai + 1 | Jerk | 语言描述 |
|---|---|---|---|---|---|
| type A | > 0 | > 0 | ai = ai + 1 | 0 | 匀加速 |
| type B | > 0 | > 0 | ai > ai + 1 | < 0 | 加速度减小的加速 |
| type C | > 0 | > 0 | ai < ai + 1 | > 0 | 加速度增大的加速 |
| type D | < 0 | < 0 | ai = ai + 1 | 0 | 匀减速 |
| type E | < 0 | < 0 | ai < ai + 1 | > 0 | 减速度增大的减速 |
| type F | < 0 | < 0 | ai > ai + 1 | < 0 | 减速度减小的减速 |
| type G | > 0 | < 0 | ai > ai + 1 | < 0 | 先加速后减速 |
| type H | < 0 | > 0 | ai < ai + 1 | > 0 | 先减速后加速 |
| type I | / | 0 | / | / | 匀速行为 |
| 模型 | 神经网络层 | 参数设置 |
|---|---|---|
| LSTM | Hidden Neurons | 60×180×60 |
| Dropout layers | 0.2×0.3×0.2 | |
| RNN | Hidden Neurons | 10 |
| NARX | Hidden Neurons | 10 |
| delays d | 2 | |
| GRNN | Hidden Neurons | 样本数量 |
| CNN | Convolution 2d Layer | 32 |
| GRU | Hidden Neurons | 60×180×60 |
| MLP | Hidden Neurons | 60×180×60 |
| 模型 | 神经网络层 | 参数设置 |
|---|---|---|
| LSTM | Hidden Neurons | 60×180×60 |
| Dropout layers | 0.2×0.3×0.2 | |
| RNN | Hidden Neurons | 10 |
| NARX | Hidden Neurons | 10 |
| delays d | 2 | |
| GRNN | Hidden Neurons | 样本数量 |
| CNN | Convolution 2d Layer | 32 |
| GRU | Hidden Neurons | 60×180×60 |
| MLP | Hidden Neurons | 60×180×60 |

| 参数 组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| 转速(n) | LSTM | 0.030 | 0.033 | 0.998 | 0.029 | 0.018 | 0.998 | 0.090 | 0.067 | 0.994 | ||
| RNN | 0.485 | 0.219 | 0.796 | 0.748 | 0.299 | 0.822 | 1.359 | 0.548 | 0.779 | |||
| NARX | 0.485 | 0.229 | 0.795 | 1.704 | 0.535 | 0.773 | 1.670 | 0.624 | 0.665 | |||
| GRNN | 0.521 | 0.247 | 0.765 | 0.884 | 0.425 | 0.820 | 1.679 | 0.613 | 0.740 | |||
| CNN | 0.485 | 0.397 | 0.709 | 0.820 | 0.599 | 0.815 | 0.994 | 0.583 | 0.801 | |||
| GRU | 0.265 | 0.179 | 0.914 | 0.263 | 0.174 | 0.975 | 0.277 | 0.158 | 0.980 | |||
| MLP | 0.423 | 0.295 | 0.856 | 0.637 | 0.449 | 0.891 | 0.755 | 0.453 | 0.905 | |||
| 速度 + 加速度 + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| RNN | 0.466 | 0.200 | 0.811 | 1.271 | 0.374 | 0.610 | 1.242 | 0.385 | 0.842 | |||
| NARX | 0.377 | 0.153 | 0.875 | 1.510 | 0.647 | 0.451 | 1.607 | 0.489 | 0.736 | |||
| GRNN | 0.545 | 0.234 | 0.743 | 1.528 | 0.506 | 0.463 | 1.543 | 0.483 | 0.781 | |||
| CNN | 0.439 | 0.307 | 0.743 | 0.873 | 0.633 | 0.824 | 1.153 | 0.563 | 0.807 | |||
| GRU | 0.288 | 0.204 | 0.889 | 0.294 | 0.209 | 0.980 | 0.285 | 0.137 | 0.992 | |||
| MLP | 0.408 | 0.303 | 0.778 | 0.749 | 0.523 | 0.870 | 0.867 | 0.427 | 0.830 | |||
| 速度 + 加速度 | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| RNN | 0.512 | 0.225 | 0.771 | 1.448 | 0.457 | 0.517 | 1.450 | 0.450 | 0.806 | |||
| NARX | 0.574 | 0.267 | 0.712 | 1.688 | 0.686 | 0.318 | 1.840 | 0.640 | 0.688 | |||
| GRNN | 0.624 | 0.330 | 0.663 | 1.581 | 0.528 | 0.424 | 1.709 | 0.520 | 0.731 | |||
| CNN | 0.702 | 0.403 | 0.775 | 1.018 | 0.657 | 0.761 | 2.029 | 0.872 | 0.620 | |||
| GRU | 0.343 | 0.318 | 0.817 | 0.401 | 0.367 | 0.915 | 0.396 | 0.255 | 0.940 | |||
| MLP | 0.499 | 0.387 | 0.774 | 0.820 | 0.603 | 0.849 | 0.901 | 0.502 | 0.815 | |||
| 参数 组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| 转速(n) | LSTM | 0.030 | 0.033 | 0.998 | 0.029 | 0.018 | 0.998 | 0.090 | 0.067 | 0.994 | ||
| RNN | 0.485 | 0.219 | 0.796 | 0.748 | 0.299 | 0.822 | 1.359 | 0.548 | 0.779 | |||
| NARX | 0.485 | 0.229 | 0.795 | 1.704 | 0.535 | 0.773 | 1.670 | 0.624 | 0.665 | |||
| GRNN | 0.521 | 0.247 | 0.765 | 0.884 | 0.425 | 0.820 | 1.679 | 0.613 | 0.740 | |||
| CNN | 0.485 | 0.397 | 0.709 | 0.820 | 0.599 | 0.815 | 0.994 | 0.583 | 0.801 | |||
| GRU | 0.265 | 0.179 | 0.914 | 0.263 | 0.174 | 0.975 | 0.277 | 0.158 | 0.980 | |||
| MLP | 0.423 | 0.295 | 0.856 | 0.637 | 0.449 | 0.891 | 0.755 | 0.453 | 0.905 | |||
| 速度 + 加速度 + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| RNN | 0.466 | 0.200 | 0.811 | 1.271 | 0.374 | 0.610 | 1.242 | 0.385 | 0.842 | |||
| NARX | 0.377 | 0.153 | 0.875 | 1.510 | 0.647 | 0.451 | 1.607 | 0.489 | 0.736 | |||
| GRNN | 0.545 | 0.234 | 0.743 | 1.528 | 0.506 | 0.463 | 1.543 | 0.483 | 0.781 | |||
| CNN | 0.439 | 0.307 | 0.743 | 0.873 | 0.633 | 0.824 | 1.153 | 0.563 | 0.807 | |||
| GRU | 0.288 | 0.204 | 0.889 | 0.294 | 0.209 | 0.980 | 0.285 | 0.137 | 0.992 | |||
| MLP | 0.408 | 0.303 | 0.778 | 0.749 | 0.523 | 0.870 | 0.867 | 0.427 | 0.830 | |||
| 速度 + 加速度 | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| RNN | 0.512 | 0.225 | 0.771 | 1.448 | 0.457 | 0.517 | 1.450 | 0.450 | 0.806 | |||
| NARX | 0.574 | 0.267 | 0.712 | 1.688 | 0.686 | 0.318 | 1.840 | 0.640 | 0.688 | |||
| GRNN | 0.624 | 0.330 | 0.663 | 1.581 | 0.528 | 0.424 | 1.709 | 0.520 | 0.731 | |||
| CNN | 0.702 | 0.403 | 0.775 | 1.018 | 0.657 | 0.761 | 2.029 | 0.872 | 0.620 | |||
| GRU | 0.343 | 0.318 | 0.817 | 0.401 | 0.367 | 0.915 | 0.396 | 0.255 | 0.940 | |||
| MLP | 0.499 | 0.387 | 0.774 | 0.820 | 0.603 | 0.849 | 0.901 | 0.502 | 0.815 | |||
| 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | |||
| LSTM | -17.5 | -29.2 | 0.1 | -40.9 | -68.2 | 0.7 | -14.3 | -28.3 | 9.7 | ||
| RNN | -8.9 | -11.0 | 5.2 | -12.2 | -18.0 | 18.0 | -14.3 | -14.4 | 4.5 | ||
| NARX | -34.3 | -43.0 | 22.9 | -10.5 | -5.7 | 41.8 | -12.7 | -23.6 | 7.0 | ||
| GRNN | -12.7 | -29.0 | 13.3 | -3.4 | -4.2 | 9.2 | -9.7 | -7.1 | 6.8 | ||
| CNN | -37.5 | -23.8 | 4.1 | -14.2 | -3.7 | 8.3 | -43.2 | -35.4 | 30.2 | ||
| GRU | -16 | -35.8 | 8.8 | -26.7 | -43.1 | 7.1 | -28 | -46.3 | 5.5 | ||
| MLP | -18.2 | -21.7 | 0.5 | -8.7 | 13.3 | 2.5 | -3.8 | -14.9 | 1.8 | ||
| 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | RMSE / % | RE / % | R2 / % | |||
| LSTM | -17.5 | -29.2 | 0.1 | -40.9 | -68.2 | 0.7 | -14.3 | -28.3 | 9.7 | ||
| RNN | -8.9 | -11.0 | 5.2 | -12.2 | -18.0 | 18.0 | -14.3 | -14.4 | 4.5 | ||
| NARX | -34.3 | -43.0 | 22.9 | -10.5 | -5.7 | 41.8 | -12.7 | -23.6 | 7.0 | ||
| GRNN | -12.7 | -29.0 | 13.3 | -3.4 | -4.2 | 9.2 | -9.7 | -7.1 | 6.8 | ||
| CNN | -37.5 | -23.8 | 4.1 | -14.2 | -3.7 | 8.3 | -43.2 | -35.4 | 30.2 | ||
| GRU | -16 | -35.8 | 8.8 | -26.7 | -43.1 | 7.1 | -28 | -46.3 | 5.5 | ||
| MLP | -18.2 | -21.7 | 0.5 | -8.7 | 13.3 | 2.5 | -3.8 | -14.9 | 1.8 | ||
| 参数组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| v + a | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| CNN-LSTM | 0.036 | 0.021 | 0.997 | 0.043 | 0.041 | 0.996 | 0.049 | 0.042 | 0.998 | |||
| v + a + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| CNN-LSTM | 0.031 | 0.012 | 0.998 | 0.028 | 0.016 | 0.997 | 0.045 | 0.029 | 0.998 | |||
| 参数组合 | 模型 | 校园 | 城市 | 高速 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | RE | R2 | RMSE | RE | R2 | RMSE | RE | R2 | ||||
| v + a | LSTM | 0.040 | 0.024 | 0.997 | 0.044 | 0.044 | 0.991 | 0.056 | 0.046 | 0.991 | ||
| CNN-LSTM | 0.036 | 0.021 | 0.997 | 0.043 | 0.041 | 0.996 | 0.049 | 0.042 | 0.998 | |||
| v + a + Jerk | LSTM | 0.033 | 0.017 | 0.998 | 0.026 | 0.014 | 0.998 | 0.048 | 0.033 | 0.996 | ||
| CNN-LSTM | 0.031 | 0.012 | 0.998 | 0.028 | 0.016 | 0.997 | 0.045 | 0.029 | 0.998 | |||
| [1] | World Meteorological Organization. 2023 State of the Global Climate[B/OL]. [2024-03-19] https://public.wmo.int. |
| [2] | 傅立新, 贺克斌, 何东全, 等. MOBILE汽车源排放因子计算模式研究[J]. 环境科学学报, 1997 (4): 89-94. |
| FU Lixin, HE Kebin, HE Dongquan, et al. A study on models of mobile source emission factors[J]. Acta Sci Circums, 1997(4): 89-94. (in Chinese) | |
| [3] | 马因韬, 刘启汉, 雷国强, 等. 机动车排放模型的应用及其适用性比较[J]. 北京大学学报(自然科学版), 2008(2): 308-316. |
| MA Yintao, LIU Qihan, LEI Guoqiang, et al. Application of vehicular emission models and comparison of their adaptability[J]. J Peking Univ (Nat Sci Edit), 2008(2): 308-316. (in Chinese) | |
| [4] | U.S.California Air Resource Board. EMFAC2017 Volume Ⅲ-Technical Documentation[R]. CARB, U, 2018. |
| [5] | GUO Hui, ZHANG Qingyu, SHI Yao, et al. Evaluation of the international vehicle emission (IVE) model with on-road remote sensing measurements[J]. Acad J Environ Sc, 2007(7): 818-826. |
| [6] | Barth M, An F, Norbeck J, et al. Modal emissions modelling: A physical approach[J]. J Transport Res Boar, 1996, 1520(1): 81-88. |
| [7] | An F, Barth M, Norbeck J, et al. Development of comprehensive modal emissions model: Operating under hot-stabilized conditions[J]. J Transport Res Boar, 1997, 1587: 52-62. |
| [8] | Barth M, Younglove T, Wenzel T, et al. Analysis of modal emissions from diverse in-use vehicle fleet[J]. J Transport Res Boar, 1997, 1587(1): 73-84. |
| [9] | Jiménez-Palacios L J. Understanding and quantifying motor vehicle emissions with vehicle specific power and TILDAS remote sensing[J]. Mass Inst Tec, 1998. |
| [10] | Rakha H, Ahn K, Trani A. Development of VT-Micro model for estimating hot stabilized light duty vehicle and truck emissions[J]. Transport Res D-TR , 2004, 9(1): 49-74. |
| [11] | Rahimi-Ajdadi F, Abbaspour-Gilandeh Y. Artificial neural network and stepwise multiple range regression method for predicting fuel consumption of tractors[J]. Mea, 2011, 44(10): 2104-2111. |
| [12] | 赵晓华, 姚莹, 伍毅平. 基于主成分分析与 BP 神经元网络的驾驶能耗组合预测模型研究[J]. 交通运输系统工程与信息, 2016, 16(5): 185-191, 204. |
| ZHAO Xiaohua, YAO Ying, WU Yiping. Research on combined prediction model of driving energy consumption based on principal component analysis and BP neural network[J]. J Transport Syst Engi Info Tec, 2016, 16(5): 185-191, 204. (in Chinese) | |
| [13] | WU Jianda, LIU Junching. Development of a predictive system for car fuel consumption using an artificial neural network[J]. Expert Syst App, 2011, 38(5): 4967-4971. |
| [14] | XU Zhigang, WEI Tao, Easa S, et al. Modelling relationship between truck fuel consumption and driving behavior using data from internet of vehicles[J]. Comput Aided Civi Inf, 2018, 33(3): 209-219. |
| [15] | ZHANG Licheng, PENG Kun, ZHAO Xiangmo, et al. New fuel consumption model considering vehicular speed, acceleration, and jerk[J]. J Intel Transport Sys, 2023, 27(2): 174-186 |
| [16] | ZHANG Licheng, YA Jingtian, XU Zhigang, et al. Novel neural-network-based fuel consumption prediction models considering vehicular Jerk[J/OL]. Electro, 2023, 12(17): 3638. (2023-08-28) https://www.mdpi.com/2079-9292/12/17/3638. |
| [17] | LI Yufang, CHEN Mingnuo, ZHAO Wanzhong. Investigating long-term vehicle speed prediction based on BP-LSTM algorithms[J]. IET Intel Transport Sys, 2019, 13(8): 1281-1290. |
| [18] | Fitters W, Cuzzocrea A, Hassani M. Enhancing LSTM prediction of vehicle traffic flow data via outlier correlations[J]. COMPSA, 2021: 210-217. |
| [19] | ZHU Weiwei, WU Jinglin, FU Ting, et al. Dynamic prediction of traffic incident duration on urban expressways: a deep learning approach based on LSTM and MLP[J]. J Intel Connect Veh, 2021, 4(2): 80-91. |
| [20] | Hochreiter S, Jürgen S. Long short-term memory[J]. Neural Compu, 1997, 9(8): 1735-1780. |
| [21] | Phan H, Andreotti F, Cooray N, et al. SeqSleepNet: end-to-end hierarchical recurrent neural network for sequence-to-sequence automatic sleep staging[J]. IEEE Trans Neural Netw Syst and Rehabit Eng, 2019, 27(3): 400-410. |
| [22] | QUAN Ruijie, ZHU Linchao, WU Yu, et al. Holistic LSTM for pedestrian trajectory prediction[J]. IEEE Trans Image Pro, 2021, 30: 3229-3239. |
| [23] | Doğan E. Analysis of the relationship between LSTM network traffic flow prediction performance and statistical characteristics of standard and nonstandard data[J]. Int'l J Forecas, 2020, 39(8): 1213-1228. |
| [24] | Gers F A. Learning to forget: Continual prediction with LSTM[C]// 9th IEE Conf Artif Neural Netw: ICANN' 99, Edinburgh, UK, 1999. |
| [25] | WANG Xin, Khattak A J, et al. What is the level of volatility in instantaneous driving decisions?[J]. Transport Res CEME, 2015, 58: 413-427. |
| [26] | Ahn K, Rakha H, Trani A, et al. Estimating vehicle fuel consumption and emissions based on instantaneous speed and acceleration levels[J]. J Transport Eng, 2002, 128(2): 182-190. |
| [27] | Agga A, Abbou A, Labbadi M, et al. CNN-LSTM: An efficient hybrid deep learning architecture for predicting short-term photovoltaic power production[J]. Elect Powe Syst Re, 2022, 208: 107908. |
| [28] | 王夷龙, 张生润, 唐小卫, 等. 基于CNN-LSTM混合模型的航空公司机票价格预测[J]. 北京交通大学学报, 2024, 48(5): 21-29. |
| WANG Yilong, ZHANG Shengrun, TANG Xiaowei, et al. Airline ticket price prediction based on cnn-lstm hybrid model[J]. J Beijing Jiaotong Uni, 2024, 48(5): 21-29. (in Chinese) |
| [1] | 梁雨琛, 段伟建, 张诗, 朱兴林, 徐进. 不同类型互通立交匝道上驾驶人心理负荷的差异[J]. 汽车安全与节能学报, 2025, 16(6): 851-858. |
| [2] | 程泽阳, 段奕阳, 杨蒙蒙, 冯忠祥, 王鹤, 朱晓俊, 保丽霞. 基于混合神经网络的交织区危险驾驶与风格的识别[J]. 汽车安全与节能学报, 2025, 16(5): 688-697. |
| [3] | 吴庆富, 袁满荣, 郝帅杰, 刘嘉伟, 牛世峰, 刘金峰. 紧急状况下驾驶人应激反应的特性指标[J]. 汽车安全与节能学报, 2025, 16(1): 43-49. |
| [4] | 张富椿, 尹燕莉, 马永娟, 肖杭洋, 陈海鑫, 余凯. 网联混合动力汽车队列的生态驾驶与能量管理分层控制[J]. 汽车安全与节能学报, 2025, 16(1): 159-169. |
| [5] | 李昕光, 孙崇效, 曲大义, 于文昌, 胡含. 考虑交叉口启停波的智能网联车混行生态驾驶策略[J]. 汽车安全与节能学报, 2024, 15(6): 895-904. |
| [6] | 陈绮桐, 赵东, 刘丛志, 李亮. 考虑经验驾驶行为的入弯实时类人速度规划方法[J]. 汽车安全与节能学报, 2024, 15(3): 309-320. |
| [7] | 徐婷, 陈姝屹, 彭冲, 陈亦新, 梁泽恺, 赵磊. 商用重载车尾气排放与驾驶行为的参数关系[J]. 汽车安全与节能学报, 2023, 14(3): 365-374. |
| [8] | 付雪青, 王宝森, 杨建军, 高海洋, 何邦全, 赵华, 郭文翠, 刘双喜. 基于双状态动态规划混动汽车坡道生态驾驶策略[J]. 汽车安全与节能学报, 2021, 12(3): 373-379. |
| [9] | 李国法,赖伟鉴,廖源,王文军,成波. 邻车切入工况下前撞预警系统的驾驶人依赖特性[J]. JASE, 2020, 11(1): 36-43. |
| [10] | 李国法,陈耀昱,吕辰, 陶达,曹东璞,成波 . 智能汽车决策中的驾驶行为语义解析关键技术[J]. JASE, 2019, 10(4): 391-412. |
| [11] | 刘 瑞,朱西产. 驾驶员加速度分布特性及其应用[J]. JASE, 2019, 10(1): 37-45. |
| [12] | 朱西产,刘智超,李霖. 基于自然驾驶数据的驾驶员紧急变道行为开环模型[J]. 汽车安全与节能学报, 2015, 6(04): 328-332. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||