欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (6): 952-961.DOI: 10.3969/j.issn.1674-8484.2024.06.017
• 智能驾驶与智慧交通 • 上一篇
秦雅琴( ), 董帅, 谢济铭, 陈亮, 刘拥华, 郭淼*()
), 董帅, 谢济铭, 陈亮, 刘拥华, 郭淼*()
收稿日期:2024-05-17
修回日期:2024-07-11
出版日期:2024-12-31
发布日期:2025-01-01
通讯作者:
*郭淼,讲师。E-mail:guomiao@kust.edu.cn。
作者简介:秦雅琴(1972—),女(汉),湖南,教授。E-mail:qinyaqin@kust.edu.cn。
基金资助:
QIN Yaqin(), DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao*()
Received:2024-05-17
Revised:2024-07-11
Online:2024-12-31
Published:2025-01-01
摘要:
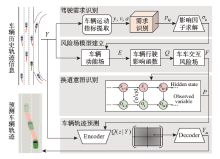
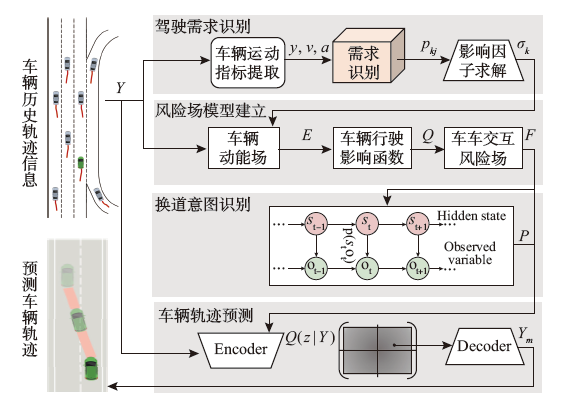
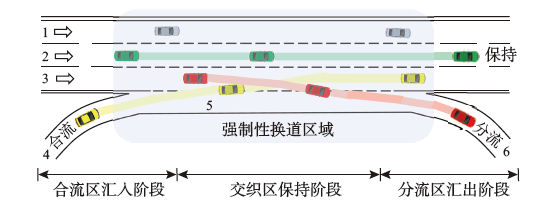
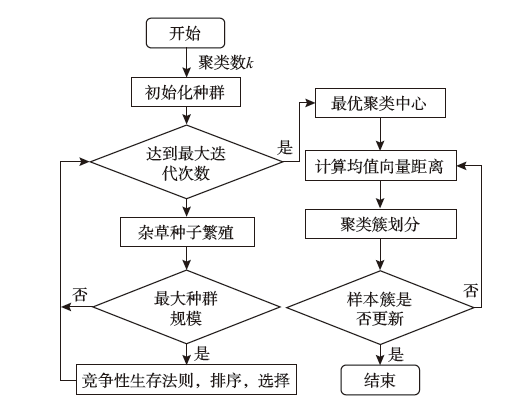
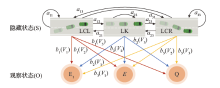
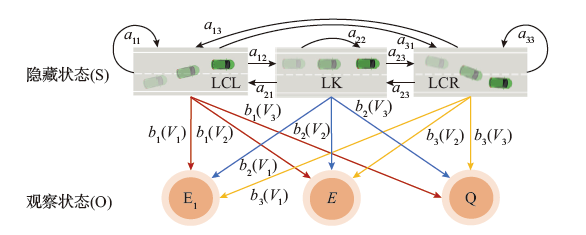
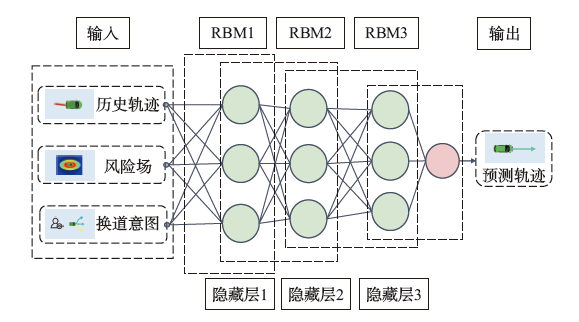
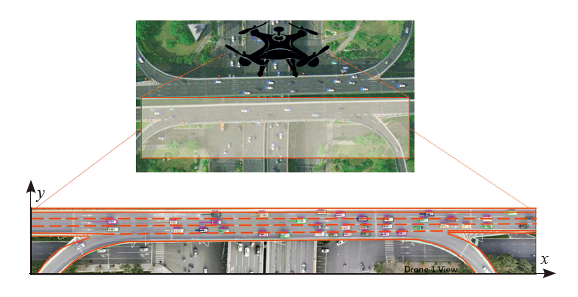
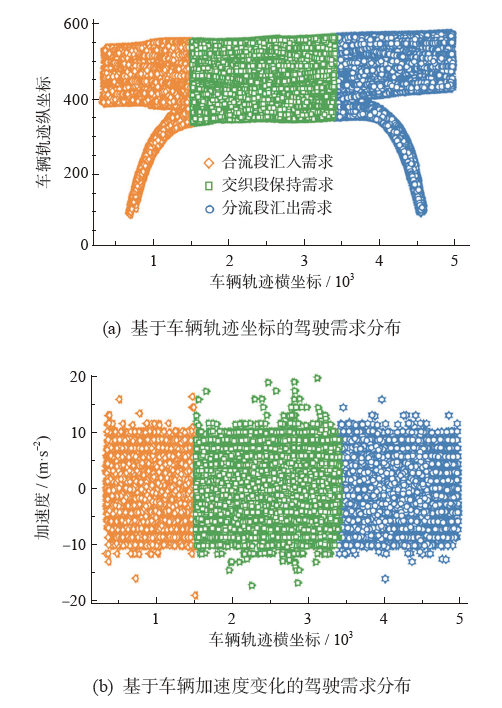
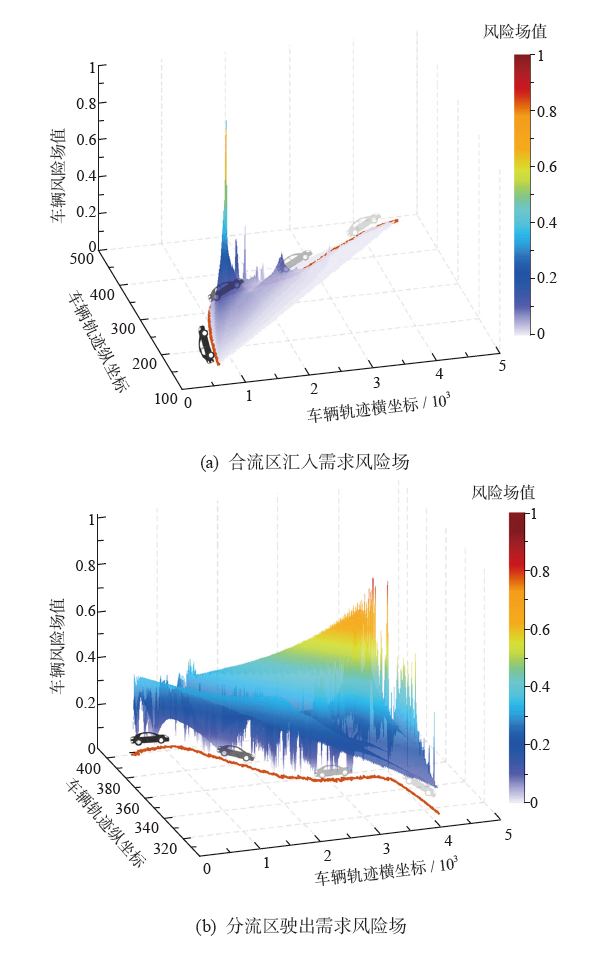
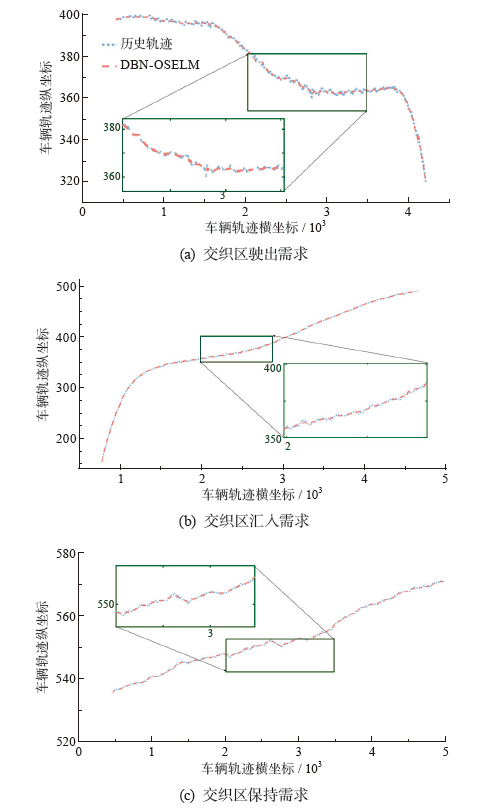
为提高交织区车辆轨迹预测精度,该文提出了一种融合行车风险场和车辆换道意图的车辆轨迹预测方法。分析交织区驾驶人驾驶需求变化,利用行车风险场模型统一表示车辆行驶时的交互风险;采用隐Markov模型识别车辆换道意图;通过深度置信网络在线学习机(DBN_OSELM)模型对输入特征进行多维度扩展和融合,提高交织区轨迹预测的准确率;最后,基于CitySim 数据集对所提方法进行评估。结果表明:模型能以较高的准确率预测高速公路交织区的车辆轨迹,交织区驾驶人3类驾驶需求(汇入、保持、驶出)的车辆轨迹预测均方根误差(RMSE)分别为0.6835、0.2574、0.6315,平均位移误差(ADE)分别为0.46、0.21、0.48 m。该研究成果有助于提高复杂场景下的车辆轨迹预测精度,改善交织区的交通安全。
中图分类号:
秦雅琴, 董帅, 谢济铭, 陈亮, 刘拥华, 郭淼. 基于行车风险场的高速公路交织区车辆轨迹预测方法[J]. 汽车安全与节能学报, 2024, 15(6): 952-961.
QIN Yaqin, DONG Shuai, XIE Jiming, CHEN Liang, LIU Yonghua, GUO Miao. Methods for predicting vehicle trajectories in motorway weaving zones based on driving risk fields[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 952-961.



| 驾驶需求 | 速度 平均值 (m·s-1) | 速度 标准差 (m·s-1) | 加速度 平均值 (m·s-2) | 加速度 标准差 (m·s-2) | 减速度 平均值 (m·s-2) | 减速度 标准差 (m·s-2) |
|---|---|---|---|---|---|---|
| 合流段汇入 | 16.86 | 5.11 | 3.69 | 2.66 | -3.71 | 2.64 |
| 交织段保持 | 16.57 | 5.21 | 3.63 | 2.57 | -3.4 | 2.55 |
| 分流段驶出 | 17.01 | 4.83 | 3.95 | 2.94 | -3.97 | 2.92 |
| 驾驶需求 | 速度 平均值 (m·s-1) | 速度 标准差 (m·s-1) | 加速度 平均值 (m·s-2) | 加速度 标准差 (m·s-2) | 减速度 平均值 (m·s-2) | 减速度 标准差 (m·s-2) |
|---|---|---|---|---|---|---|
| 合流段汇入 | 16.86 | 5.11 | 3.69 | 2.66 | -3.71 | 2.64 |
| 交织段保持 | 16.57 | 5.21 | 3.63 | 2.57 | -3.4 | 2.55 |
| 分流段驶出 | 17.01 | 4.83 | 3.95 | 2.94 | -3.97 | 2.92 |

| 模型 | RMSE | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
| DBN_OSELM | 0.683 5 | 0.257 4 | 0.631 5 |
| CNN | 0.906 7 | 0.431 5 | 0.835 8 |
| Bi-LSTM | 1.568 3 | 0.347 5 | 0.838 6 |
| LSTM | 1.545 0 | 0.943 2 | 1.061 5 |
| GRU | 1.382 1 | 0.405 1 | 1.249 5 |
| 模型 | RMSE | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
| DBN_OSELM | 0.683 5 | 0.257 4 | 0.631 5 |
| CNN | 0.906 7 | 0.431 5 | 0.835 8 |
| Bi-LSTM | 1.568 3 | 0.347 5 | 0.838 6 |
| LSTM | 1.545 0 | 0.943 2 | 1.061 5 |
| GRU | 1.382 1 | 0.405 1 | 1.249 5 |
| 模型 | ADE / m | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
| DBN_OSELM | 0.46 | 0.21 | 0.48 |
| CNN | 0.50 | 0.24 | 0.53 |
| Bi-LSTM | 0.85 | 0.27 | 0.54 |
| LSTM | 1.28 | 0.86 | 0.88 |
| GRU | 0.97 | 0.33 | 1.45 |
| 模型 | ADE / m | ||
|---|---|---|---|
| 合流段汇入需求 | 交织段保持需求 | 分流段驶出需求 | |
| DBN_OSELM | 0.46 | 0.21 | 0.48 |
| CNN | 0.50 | 0.24 | 0.53 |
| Bi-LSTM | 0.85 | 0.27 | 0.54 |
| LSTM | 1.28 | 0.86 | 0.88 |
| GRU | 0.97 | 0.33 | 1.45 |

| [1] | Vishnu C, Abhinav V, Roy D, et al. Improving multi-agent trajectory prediction using traffic states on interactive driving scenarios[J]. IEEE Robot Auto Letts, 2023, 8(5): 2708-2715. |
| [2] | 殷子健, 徐良杰, 刘伟, 等. 基于迁移学习的高速公路交织区车辆轨迹预测[J]. 深圳大学学报(理工版), 2024, 41(1): 92-100. |
| YIN Zijian, XU Lujie, LIU Wei, et al. Vehicle trajectory prediction in weaving area of expressway based on transfer learning[J]. J Shenzhen Univ (Sci Engi), 2024, 41(1): 92-100. (in Chinese) | |
| [3] | Khatib O. Real-time obstacle avoidance for manipulators and mobile robots[J]. Int’l J Robot Res, 1986, 5(1): 90-98. |
| [4] | Wolf M T, Burdick J W. Artificial potential functions for highway driving with collision avoidance[C]// 2008 IEEE Int’l Conf Robot Autom. IEEE, 2008: 3731-3736. |
| [5] | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1): 105-114. |
| WANG Jianqiang, WU Jian, LI Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. Chin J Highw Transport, 2016, 29(1): 105-114. (in Chinese) | |
| [6] |
李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87.
doi: 10.19721/j.cnki.1001-7372.2019.12.008 |
|
LI Linhen, GAN Jing, QU Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. Chin J Highw Transport, 2019, 32(12): 76-87. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2019.12.008 |
|
| [7] |
李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆换道模型[J]. 中国公路学报, 2021, 34(6): 184-195.
doi: 10.19721/j.cnki.1001-7372.2021.06.018 |
|
LI Linhen, GAN Jing, QU Xu, et al. Lane-changing model based on safety potential field theory under the connected and automated vehicles environment[J]. Chin J Highw Transport, 2021, 34(6): 184-195. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2021.06.018 |
|
| [8] | HUANG Yanjun, DU Jiatong, YANG Ziru, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Trans Intel Vehi, 2022, 7(3): 652-674. |
| [9] | 王明, 唐小林, 杨凯, 等. 考虑预测风险的自动驾驶车辆运动规划方法[J]. 汽车工程, 2023, 45(8): 1362-1372, 1407. |
| WANG Ming, TANG Xiaolin, YAN Kai, et al. A motion planning method for autonomous vehicles considering prediction risk[J]. Autom Engineering, 2023, 45(8): 1362-1372, 1407. (in Chinese) | |
| [10] | 高镇海, 鲍明喜, 高菲, 等. 基于LSTM概率多模态预期轨迹预测方法[J]. 汽车工程, 2023, 45(7): 1145-1152. |
| GAO Zhenhai, BAO Mingxi, GAO Fei, et al. The method of probabilistic multi-modal expected trajectory prediction based on LSTM[J] Autom Engineering, 2023, 45(7):1145-1152. (in Chinese) | |
| [11] | MO Xiaoyu, XING Yang, LYU Chen. Graph and recurrent neural network based vehicle trajectory prediction for highway driving [C]// 2021 IEEE Int’l Intel Transport Syst Conf (ITSC). IEEE, 2021: 1934-1939. |
| [12] | WANG Xiao, TANG Ke, DAI Xingyuan, et al. Safety-balanced driving-style aware trajectory planning in intersection scenarios with uncertain environment[J]. IEEE Trans Intel Vehi, 2023, 8(4): 2888-2898. |
| [13] | 金立生, 魏青嵩, 谢宪毅, 等. 基于DMPC的无信控交叉口智能网联车辆多车协同轨迹规划[J]. 汽车安全与节能学报, 2024, 15(2): 235-241. |
| JIN Lisheng, WEI Qingsong, XIE Xianyi, et al, Multi-vehicle cooperative path planning at untrusted intersections based on DMPC[J]. J Autom Safe Energ, 2024, 15(2): 235-241. (in Chinese) | |
| [14] | 宋秀兰, 董兆航, 单杭冠, 等. 基于时空融合的多头注意力车辆轨迹预测[J]. 浙江大学学报(工学版), 2023, 57(8): 1636-1643. |
| SONG Xiulan, DONG Zhaohan, SHANG Hanguan. Vehicle trajectory prediction based on temporal-spatialmulti-head attention mechanism[J]. J Zhejiang Univ (Engi Sci), 2023, 57(8): 1636-1643. (in Chinese) | |
| [15] |
冯玉荣, 杨少伟, 杨宏志, 等. 高速公路交织区运行分析方法对比研究[J]. 公路交通科技, 2018, 35(8): 134-143.
doi: 10.3969/j.issn.1002-0268.2018.08.018 |
| FENG Yurong, YANG Shaowei, YANG Hongzhi, et al. Comparative study on operation analysis methods of expressway weaving area[J]. J Highw Transport Res Develop, 2018, 35(8): 134-143. (in Chinese) | |
| [16] | Mantouka E G, Barmpounakis E N, Vlahogianni E I. Identifying driving safety profiles from smartphone data using unsupervised learning[J]. Safe Sci, 2019, 119: 84-90. |
| [17] | Mehrabian A R, Lucas C. A novel numerical optimization algorithm inspired from weed colonization[J]. Ecolog Info, 2006, 1(4): 355-366. |
| [18] | SONG Xianmin, SUN Yaqian, TAN Pengfei. A dynamic bayesian network model for real-time risk propagation of secondary rear-end collision accident using driving risk field[J]. IEEE Access, 2022, 10: 72429-72443. |
| [19] | 胡春燕, 曲大义, 赵梓旭, 等. 考虑前车驾驶风格的改进自适应巡航控制跟驰模型及仿真[J]. 济南大学学报(自然科学版), 2023, 37(3): 331-338. |
| HU Chunyana, QU Dayi, ZHAO Zixu, et al. lmproved Adaptive Cruise Control Car-following Model and Simulation Considering Driving Styles of Leading Car[J]. J Jinan Univ (Nat Sci Edit), 2023, 37(3): 331-338. (in Chinese) | |
| [20] | YUAN Renteng, Abdel-Aty M, GU Xin, et al. A unified approach to lane change intention recognition and driving status prediction through TCN-LSTM and multi-task learning models[J]. Phys A: Statist Mech its Appl, 2023, 632(1): 129-332. |
| [21] | 谢济铭, 秦雅琴, 彭博, 等. 多车道交织区车辆跟驰行为风险判别与冲突预测[J]. 交通运输系统工程与信息, 2021, 21(3): 131-139. |
| XIE Jiming, QIN Yaqin, PENG Bo, et al. Risk discrimination and conflict prediction of vehicle-following behavior in multi-lane weaving sections[J]. J Transport Syst Engi Info Tech, 2021, 21(3): 131-139. (in Chinese) |
| [1] | 程泽阳, 段奕阳, 杨蒙蒙, 冯忠祥, 王鹤, 朱晓俊, 保丽霞. 基于混合神经网络的交织区危险驾驶与风格的识别[J]. 汽车安全与节能学报, 2025, 16(5): 688-697. |
| [2] | 王振宇, 余卓平, 田炜, 熊璐, 李拙人. 基于轨迹预测模型的仿真车辆轨迹生成算法[J]. 汽车安全与节能学报, 2025, 16(2): 286-293. |
| [3] | 刘洋, 占佳豪, 李深, 李小鹏, 陈峻. 自动驾驶技术的未来:单车智能和智能车路协同[J]. 汽车安全与节能学报, 2024, 15(5): 611-633. |
| [4] | 瞿广跃, 杨澜, 袁梦, 房山, 刘松岩. 面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法[J]. 汽车安全与节能学报, 2024, 15(5): 689-701. |
| [5] | 石丽英, 周国峰, 李泽星, 曹莉凌. 基于3DSSD的差异路口自适应联邦学习算法[J]. 汽车安全与节能学报, 2024, 15(5): 732-741. |
| [6] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [7] | 高凯, 刘健, 刘林鸿, 刘欣宇, 张金来, 杜荣华. 基于LSTM-多头混合注意力的可解释换道意图预测[J]. 汽车安全与节能学报, 2024, 15(5): 763-773. |
| [8] | 周星, 刘夫云, 唐振天, 邓聚才. 基于轨迹预测最优侧向加速度的驾驶员模型[J]. 汽车安全与节能学报, 2023, 14(3): 338-345. |
| [9] | 韩玲, 张晖, 方若愚, 刘国鹏, 朱长盛, 迟瑞丰. 基于改进深度强化学习的全局路径规划策略[J]. 汽车安全与节能学报, 2023, 14(2): 202-211. |
| [10] | 张宏, 于海亮, 郑赞, 袁胜东, 熊国强. 基于数字孪生的道路交叉口建模与应用[J]. 汽车安全与节能学报, 2023, 14(1): 55-61. |
| [11] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [12] | 徐杰, 裴晓飞, 杨波, 方志刚. 融合车辆轨迹预测的学习型自动驾驶决策[J]. 汽车安全与节能学报, 2022, 13(2): 317-324. |
| [13] | 郝璐璐, 谢辉, 宋康, 闫龙. 基于边缘计算的交叉路口无人驾驶车辆通行轨迹预测算法[J]. 汽车安全与节能学报, 2021, 12(2): 163-172. |
| [14] | 谢辉,高斌,熊硕,王悦. 结构化道路中动态车辆的轨迹预测[J]. JASE, 2019, 10(4): 413-422. |
| [15] | 谢伯元,李克强,王建强, 赵树连. “三网融合”的车联网概念及其在汽车工业中的应用[J]. 汽车安全与节能学报, 2013, 4(4): 348-355. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||