欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (3): 355-364.DOI: 10.3969/j.issn.1674-8484.2023.03.011
丁鹏1,2( ), 邹晔1,2(), 郭祥龙1, 陈珣1, 鲁福硕1
), 邹晔1,2(), 郭祥龙1, 陈珣1, 鲁福硕1
收稿日期:2023-03-01
修回日期:2023-05-16
出版日期:2023-06-30
发布日期:2023-07-11
通讯作者:
*邹晔 (1975—),男(汉),江苏,教授。E-mail:zouye@wxit.edu.cn。
作者简介:丁鹏 (1983—),男(汉),江苏,副教授。E-mail:907245182@qq.com。
基金资助:
DING Peng1,2(), ZOU Ye1,2(), GUO Xianglong1, CHEN Xun1, LU Fushuo1
Received:2023-03-01
Revised:2023-05-16
Online:2023-06-30
Published:2023-07-11
摘要:
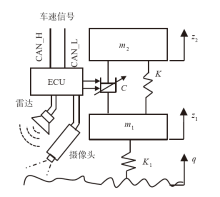
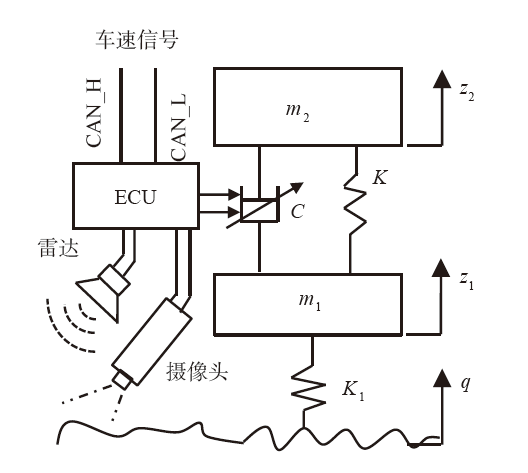
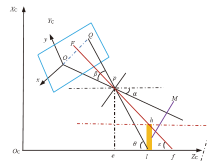
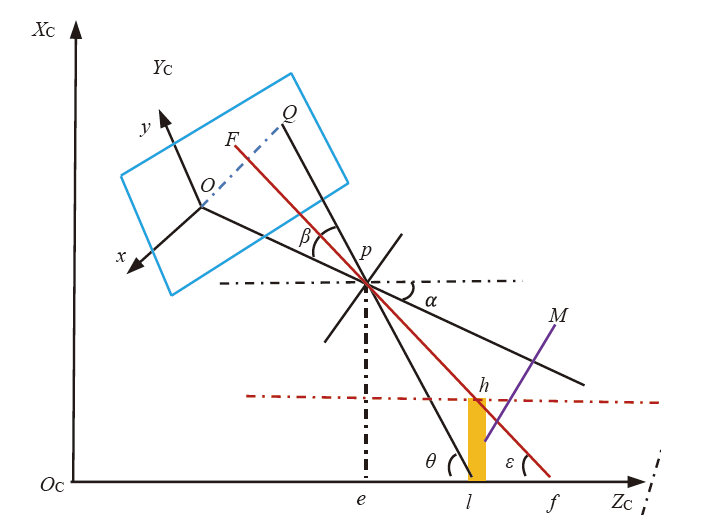
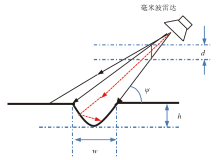
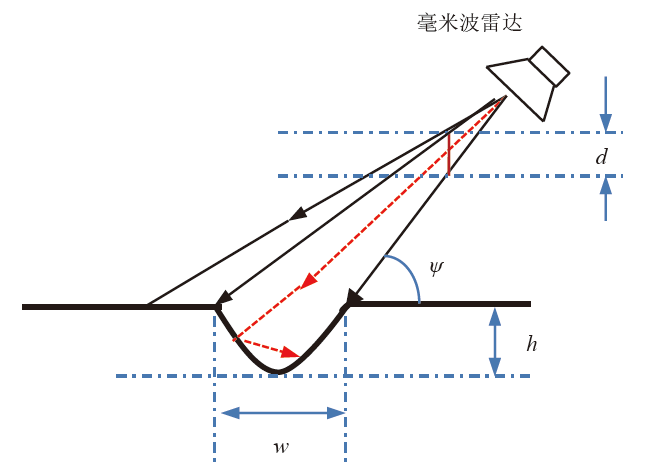
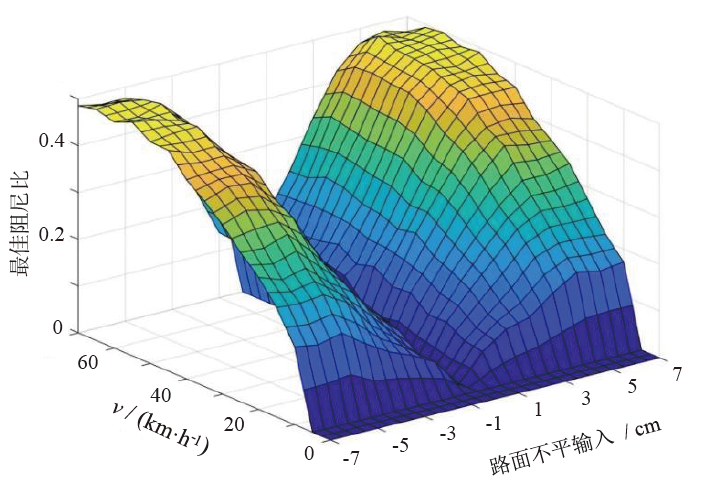
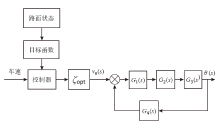
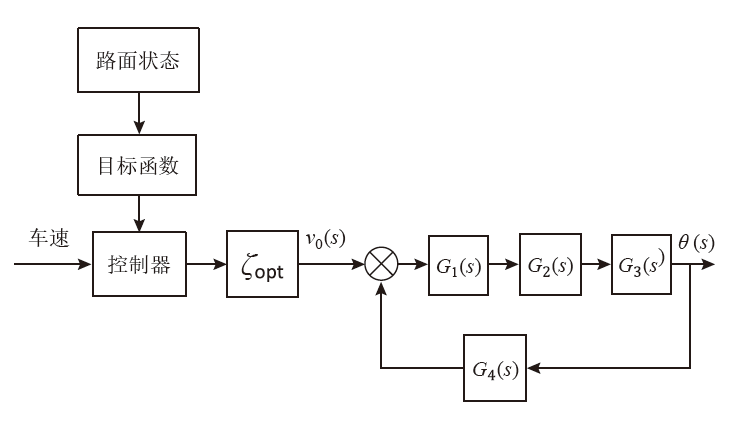
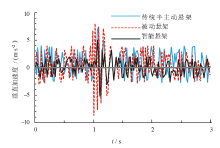
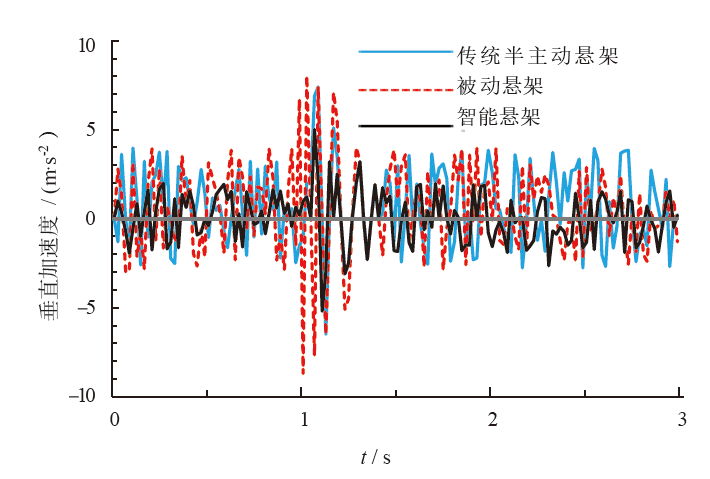
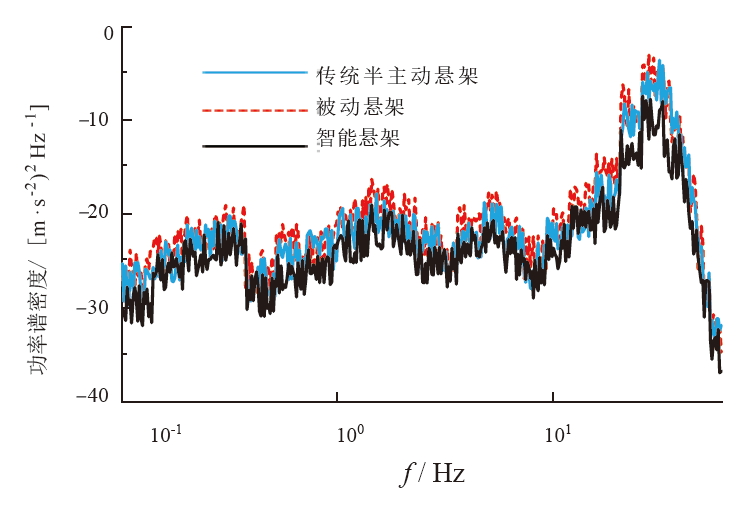
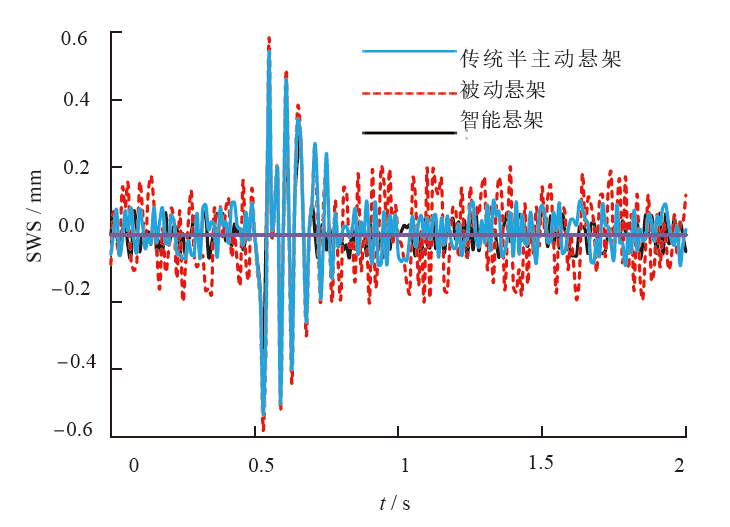
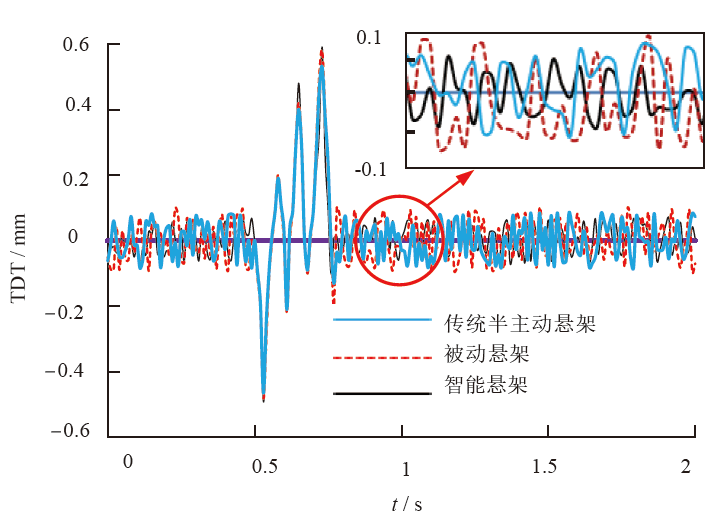
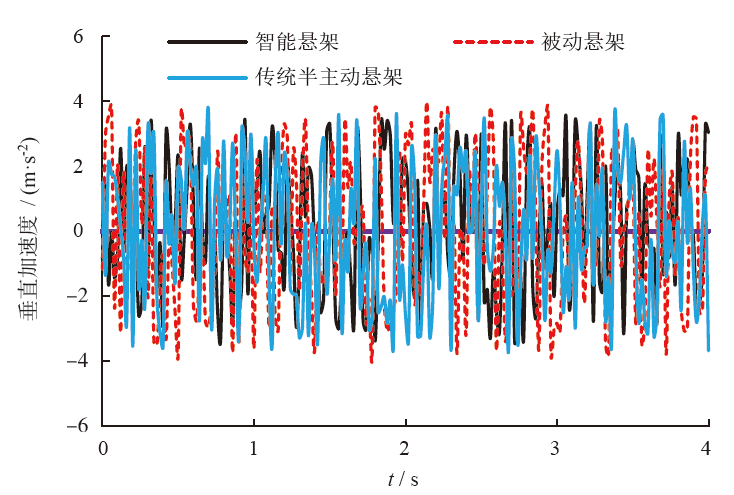
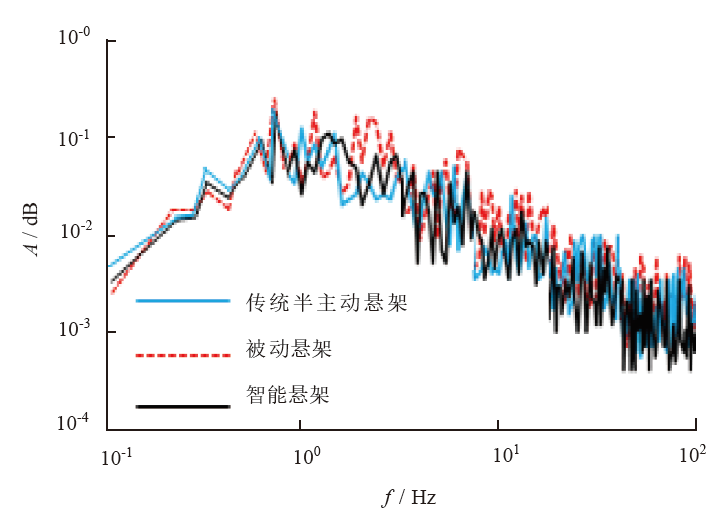
为提高无人驾驶汽车在破损和小型障碍物路面行驶的安全性和平顺性,提出了一种基于多传感器信息融合的半主动悬架控制方法。建立考虑多传感器信息融合的汽车1/4悬架振动模型,揭示路面不平信息与汽车振动量之间的关系;利用摄像头和雷达波扫描并识别不平路面状况,创建路面不平度数学模型,通过检测边缘交并比和图神经网络(GNN)算法对不平路面进行信息融合和匹配,得到复杂环境下可信度较高的路面不平数学模型;提出利用车速和路面不平信息计算半主动悬架最佳阻尼比,将悬架调节至该阻尼比以实时适应不同路面状况;开展典型路面输入工况下汽车平顺性试验,对比与分析不同悬架的振动加速度响应信号。结果表明:相同条件下多信息融合控制的无人驾驶悬架振动加速度最大峰值比被动悬架减少43%,验证了所提方法的优越性。
中图分类号:
丁鹏, 邹晔, 郭祥龙, 陈珣, 鲁福硕. 复杂环境下多传感器信息融合的无人驾驶汽车智能悬架自动控制方法[J]. 汽车安全与节能学报, 2023, 14(3): 355-364.
DING Peng, ZOU Ye, GUO Xianglong, CHEN Xun, LU Fushuo. An automatic control method for semi-active suspension of driverless vehicle based on multi-sensor information fusion in complex environment[J]. Journal of Automotive Safety and Energy, 2023, 14(3): 355-364.


| 距离/ m | 雷达测量数据 / mm | 摄像头测量数据 /mm | 融合数据/mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 长 | 宽 | 高 | 长 | 宽 | 高 | 长 | 宽 | 高 | |||
| 5 | 179.21 | 36.35 | 46.41 | 178.95 | 36.11 | 45.98 | 178.03 | 35.11 | 45.10 | ||
| 5 | 179.14 | 36.25 | 46.15 | 178.81 | 35.98 | 45.95 | 178.02 | 35.19 | 45.11 | ||
| 5 | 179.43 | 36.78 | 46.75 | 178.69 | 35.89 | 46.00 | 178.05 | 35.18 | 45.09 | ||
| 10 | 180.32 | 36.96 | 47.12 | 179.56 | 36.92 | 46.21 | 178.52 | 35.31 | 45.33 | ||
| 10 | 180.18 | 36.88 | 47.10 | 179.32 | 36.69 | 46.18 | 178.46 | 35.35 | 45.38 | ||
| 10 | 180.56 | 36.95 | 47.43 | 179.72 | 36.89 | 46.48 | 178.31 | 35.34 | 45.22 | ||
| 20 | 181.23 | 37.21 | 47.70 | 181.53 | 37.41 | 47.92 | 178.93 | 35.61 | 45.84 | ||
| 20 | 181.53 | 37.61 | 47.81 | 181.66 | 37.71 | 47.98 | 179.02 | 35.74 | 45.54 | ||
| 20 | 181.19 | 37.26 | 47.58 | 181.69 | 37.68 | 48.01 | 178.81 | 35.66 | 45.53 | ||
| 距离/ m | 雷达测量数据 / mm | 摄像头测量数据 /mm | 融合数据/mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 长 | 宽 | 高 | 长 | 宽 | 高 | 长 | 宽 | 高 | |||
| 5 | 179.21 | 36.35 | 46.41 | 178.95 | 36.11 | 45.98 | 178.03 | 35.11 | 45.10 | ||
| 5 | 179.14 | 36.25 | 46.15 | 178.81 | 35.98 | 45.95 | 178.02 | 35.19 | 45.11 | ||
| 5 | 179.43 | 36.78 | 46.75 | 178.69 | 35.89 | 46.00 | 178.05 | 35.18 | 45.09 | ||
| 10 | 180.32 | 36.96 | 47.12 | 179.56 | 36.92 | 46.21 | 178.52 | 35.31 | 45.33 | ||
| 10 | 180.18 | 36.88 | 47.10 | 179.32 | 36.69 | 46.18 | 178.46 | 35.35 | 45.38 | ||
| 10 | 180.56 | 36.95 | 47.43 | 179.72 | 36.89 | 46.48 | 178.31 | 35.34 | 45.22 | ||
| 20 | 181.23 | 37.21 | 47.70 | 181.53 | 37.41 | 47.92 | 178.93 | 35.61 | 45.84 | ||
| 20 | 181.53 | 37.61 | 47.81 | 181.66 | 37.71 | 47.98 | 179.02 | 35.74 | 45.54 | ||
| 20 | 181.19 | 37.26 | 47.58 | 181.69 | 37.68 | 48.01 | 178.81 | 35.66 | 45.53 | ||
| [1] | GONG Mingde, YAN Xin. Robust control strategy of heavy vehicle active suspension based on road level estimation[J]. Int’l J Autom Tech, 2021(22): 141-153. |
| [2] | Fossati G G, Miguel L F F, Gasas W J P. Multi-objective optimization of the suspension system parameters of a full vehicle model[J]. Optim Engi, 2019 (20): 151-177. |
| [3] |
蔡英凤, 邰康盛, 王海, 等. 无人驾驶汽车周边车辆行为识别算法研究[J]. 汽车工程, 2020, 42(11): 1464-1472+1505.
doi: 10.19562/j.chinasae.qcgc.2020.11.003 |
| CAI Yingfeng, TAI Kangsheng, WANG Hai, et al. Research on behavior recognition algorithm of surrounding vehicles for driverless car[J]. Autom Engineering, 2020, 42(11): 1464-1472+1505. (in Chinese) | |
| [4] | 刘志伟, 刘建荣, 邓卫. 基于潜在类别的无人驾驶汽车选择行为[J]. 吉林大学学报(工学版), 2021, 51(4): 1261-1268. |
| LIU Zhiwei, LIU Jianrong, DENG Wei. Travelers choice behavior of autonomous vehicles based on latent class[J]. J Jilin Univ (Eng Tech Ed), 2021, 51(4): 1261-1268. (in Chinese) | |
| [5] | 沈凯, 刘庭欣, 左思琪, 等. 复杂城市环境下GNSS/INS组合导航可观测度分析及鲁棒滤波方法[J]. 仪器仪表学报, 2020, 41(9): 252-261. |
| SHEN Kai, LIU Tingxin, ZUO Siqi, et al. Observability analysis and robust fusion algorithms of GNSS/INS integrated navigation in complex urban environment[J]. J Sci Instrument, 2020, 41(9): 252-261. (in Chinese) | |
| [6] | 边辰通, 殷国栋, 徐利伟, 等. 无人驾驶汽车编队雾天主动拯救系统[J]. 汽车工程, 2020, 42(1): 20-26. |
| BIAN Chentong, YIN Guodong, XU Liwei, et al. Active rescue system of unmanned vehicle platoon in fog weather[J]. Autom Engineering, 2020, 42(1): 20-26. (in Chinese) | |
| [7] | 袁朝春, 翁烁丰, 何友国, 等. 基于改进人工势场法的路径规划决策一体化算法研究[J]. 农业机械学报, 2019, 50(9): 394-403. |
| YUAN Chaochun, WENG Shuofen, HE Youguo, et al. Integration algorithm of path planning and decision-making based on improved artificial potential field[J]. Trans Chin Soc Agri Mach, 2019, 50(9): 394-403. (in Chinese) | |
| [8] |
刘秋, 孙晋伟, 张华, 等. 基于卷积神经网络的路面识别及半主动悬架控制[J]. 兵工学报, 2020, 41(8): 1483-1493.
doi: 10.3969/j.issn.1000-1093.2020.08.002 |
| LIU Qiu, SUN Jinwei, ZHANG Hua. Road identification and semi-active suspension control based on convolutional neural network[J]. Acta Armament, 2020, 41(8): 1483-1493. (in Chinese) | |
| [9] | 汪若尘, 王英杰, 丁仁凯, 等. 基于卡尔曼观测器的磁流变悬架半主动控制[J]. 华中科技大学学报(自然科学版), 2020, 48(12): 49-54. |
| WNG Ruochen, WANG Yingjie, DING Kairen, et al. Semi-active control of magnetorheological suspension based on Kalman observer[J]. J Huazhong Univ Sci Tech (Eng Tech Ed), 2020, 48(12): 49-54. (in Chinese) | |
| [10] | 江治东, 郑敏毅, 张农. 半主动抗俯仰液压互联悬架俯仰动力学的研究[J]. 振动与冲击, 2020, 39(14): 272-278. |
| JIANG Zhidong, ZHENG Minyi, ZHANG Nong. Pitch dynamics of a semi-active anti-pitch hydraulic interconnected suspension[J]. J Vibr Shock, 2020, 39(14): 272-278. (in Chinese) | |
| [11] | 陈龙, 马瑞, 王寿静, 等. 车辆半主动悬架阻尼多模式切换控制研究[J]. 振动与冲击, 2020, 39(13): 148-155. |
| CHEN Long, MA Rui, WANG Shoujing, et al. Damping multi-mode switching control for a vehicle semi-active suspension[J]. J Vibr Shock, 2020, 39(13): 148-155. (in Chinese) | |
| [12] |
孙晋伟, 秦也辰, 王振峰, 等. 基于路面识别的非线性悬架系统自适应控制[J]. 东北大学学报(自然科学版), 2018, 39(9): 1299-1303.
doi: 10.12068/j.issn.1005-3026.2018.09.017 |
| SUN Jinwei, QIN Yechen, WANG Zhenfeng, et al. Adaptive control of the nonlinear suspension system based on road estimation[J]. J Northeast Univ (Eng Tech Ed), 2018, 39(9): 1299-1303. (in Chinese) | |
| [11] | 丁世海, 阳恩慧, 王郴平, 等. 沥青路面表面纹理三维高精度激光非接触式检测[J]. 西南交通大学学报, 2020, 55(4): 758-764. |
| DING Shihai, YANG Enhui, WANG Chenping, et al. Three-dimensional high-precision laser non-contact detection of Asphalt pavement surface texture[J]. J Southwest Jiaotong Univ, 2020, 55(4): 758-764. (in Chinese) | |
| [12] | MING Chen, LIU Rufei, YANG Jiben,. et al. Pavement damage identification method based on point cloud multi-source feature enhancement[J]. Int’l J Pave Res Tech, 2022(15): 257-268. |
| [13] | Ab Talib M H, Mat Darus I Z, Samin P M, et al. Vibration control of semi-active suspension system using PID controller with advanced firefly algorithm and particle swarm optimization[J]. J Amb Intel Human Comput, 2021(12): 1119-1137. |
| [14] | HAN Shiyuan, ZHONG Xiaofang, CHEN Yuehui, et al. Fuzzy guaranteed cost H∞ control of uncertain nonlinear fuzzy vehicle active suspension with random actuator delay[J]. Int’l J Fuzzy Sys, 2019(21): 2021-2031. |
| [15] | XING Xudong, CHEN Zhaobo, FENG Zhongqiang. A variable stiffness and damping control strategy for improving vibration isolation performances in low-frequency excitation[J]. J Vibra Engi Tech, 2023(11): 1596-1608. |
| [16] | 彭博, 蒋阳升, 陈成, 等. 基于1 mm精度路面三维图像的裂缝自动并行识别算法[J]. 东南大学学报(自然科学版), 2015, 45(6): 1190-1196. |
| PENG Bo, JIANG Yangsheng, HEN Cheng, et al. Automatic parallel cracking detection algorithm based on 1 mm resolution 3D pavement images[J]. J Southeast Univ (Natu Sci Ed), 2015, 45(6): 1190-1196. (in Chinese) | |
| [17] | 邱延峻, 王国龙, 阳恩慧, 等. 基于多特征检验的三维沥青路面裂缝检测[J]. 西南交通大学学报, 2020, 55(3): 518-524. |
| QIU Yanjun, WANG Guolong, YANG Enhui, et al. Crack detection of 3D asphalt pavement based on multi-feature test[J]. J Southwest Jiaotong Univ, 2020, 55(3): 518-524. (in Chinese) | |
| [18] | Shahbaznia M, Mirzaee A, Raissi Dehkordi M. A new model updating procedure for reliability-based damage and load identification of railway bridges[J]. KSCE J Civi Engi, 2020(24): 890-901. |
| [19] | CHEN Chao, PU Jiaoqi, LU Nan, et al. Knowledge-based identification and damage detection of bridges spanning water via high-spatial-resolution optical remotely sensed imagery[J]. J Indian Soc Remote Sens, 2019(47): 1999-2008. |
| [20] | 李琳辉, 伦智梅, 连静, 等. 基于卷积神经网络的道路车辆检测方法[J]. 吉林大学学报(工学版), 2017, 47(2): 384-391. |
| LI Linhui, LUN Zhimei, LIAN Jing, et al. Convolution neural network-based vehicle detection method[J]. J Jilin Univ (Eng Tech Ed), 2017, 47(2): 384-391. (in Chinese) | |
| [21] |
王世峰, 都凯悦, 孟颖, 等. 基于机器学习的车辆路面类型识别技术研究[J]. 兵工学报, 2017, 38(8): 1642-1648.
doi: 10.3969/j.issn.1000-1093.2017.08.023 |
| WANG Shifeng, DU Kaiyue, MENG Ying, et al. Machine learning-based road terrain recognition for land vehicles[J]. Acta Armamenti, 2017, 38(8): 1642-1648. (in Chinese) | |
| [22] |
Solhmirzaei A, Azadi S, K azemi R. Road profile estimation using wavelet neural network and 7-DOF vehicle dynamic systems[J]. J Mech Sci Tech, 2012, 26(10): 3029-3036.
doi: 10.1007/s12206-012-0812-x URL |
| [23] | Ngwangwa H M, Heyns P S, Breytenbach H G A, et al. Reconstruction of road defects and road roughness classification using artificial neural networks simulation and vehicle dynamic responses: application to experimental data[J]. J Terrame-Chanics, 2014, 53(1): 1-18. |
| [24] | 谷盛丰, 顾久, 郑玲玲, 等. 基于RBF神经网络识别路面不平度的研究[J]. 汽车工程学报, 2019, 9(3): 157-163. |
| GU Shengfeng, GU Jiu, ZHENG Lingling, et al. Road roughness identification based on BP neural network[J]. J Autom Engi, 2019, 9(3): 157-163. (in Chinese) | |
| [25] | 段虎明, 石峰, 谢飞, 等. 路面不平度研究综述[J]. 振动与冲击, 2009, 28(9): 95-101. |
| DUAN Huming, SHI Feng, XIE Fei, et al. A survey of road roughness study[J]. J Vibr Shock, 2009, 28(9):95-101. (in Chinese) | |
| [26] | 丁鹏, 王忠, 解雅雯, 等. 基于视觉传感技术的半主动悬架调控方法[J]. 应用力学学报, 2020, 37(4): 1682-1688+1869. |
| DING Peng, WANG Zhong, XIE Yawen, et al. Semi-active suspension control method based on visual sensing technology[J] Acta Mech Sinica, 2020, 37(4): 1682-1688+1869. (in Chinese) | |
| [27] | 李培新, 姜小燕, 魏燕定, 等. 基于跟踪误差模型的无人驾驶车辆预测控制方法[J]. 农业机械学报, 2017, 48(10): 351-357. |
| LI Peixin, JIANG Xlaoyan, WEI Yanding, et al. Predictive control method of autonomous vehicle based on tracking-error model[J]. Trans Chin Soc Agri Mach, 2017, 48(10): 351-357. (in Chinese) | |
| [28] | 宋伟杰. 基于毫米波雷达与机器视觉融合的车辆检测技术研究[D]. 合肥: 合肥工业大学, 2020. |
| SONG Weijie. Research on vehicle detection technology based on fusion of millimeter wave radar and machine vision[D]. Hefei: Hefei Univ Tech, 2020. (in Chinese) | |
| [29] | 赵雷雷. 汽车行驶路况辨识与半主动悬架系统实时最佳阻尼匹配研究[D]. 济南: 山东理工大学, 2011. |
| ZHAO Leilei. Study on the identification of driving road condition and real-time optimization damping Match of automobile semiactive suspension system[D]. Jinan: Shandong Univ Tech, 2011. (in Chinese) | |
| [30] | 赵雷雷, 周长城, 于曰伟. 半主动悬架系统的最佳阻尼比控制策略研究[J]. 汽车工程, 2018, 40(1): 41-47. |
| ZHAO Leilei, ZHOU Changcheng, YU Yuewei. A research on optimal damping ratio control strategy for semi-active suspension system[J]. Autom Engineering, 2018, 40(1): 41-47. (in Chinese) |
| [1] | 李茂月, 吕虹毓, 河香梅, 徐光岐, 于伟. 自动驾驶中周围车辆识别与信息地图构建技术[J]. 汽车安全与节能学报, 2022, 13(1): 131-141. |
| [2] | 时培成, 杨剑锋, 梁涛年, 齐恒. 基于阈值自适应调整的图像特征均匀分布ORB算法改进[J]. 汽车安全与节能学报, 2021, 12(3): 305-313. |
| [3] | 谢 辉,刘爽爽. 基于模型预测控制的无人驾驶汽车横纵向运动控制[J]. JASE, 2019, 10(3): 326-333. |
| [4] | 李克强,张书玮,罗禹贡,王建强. 智能环境友好型车辆的概念及其最新进展[J]. 汽车安全与节能学报, 2013, 4(2): 109-120. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||