| [1] |
王相海, 丛志环, 方玲玲, 等. 基于 HMM 的车辆行驶状态实时判别方法研究[J]. 自动化学报, 2013, 39(12): 2131-2142.
|
|
WANG Xianghai, CONG Zhihuai, FANG lingling, et al. Determination of real-time vehicle driving status using HMM[J]. Acta Automatica Sinica, 2013, 39(12): 2131-2142. (in Chinese)
doi: 10.3724/SP.J.1004.2013.02131
URL
|
| [2] |
XU Donghao, HE Xu, ZHAO Huijing, et al. Ego-centric traffic behavior understanding through multi-level vehicle trajectory analysis[C]//2017 IEEE Int’l Conf Robo Automa (ICRA), 2017: 211-218.
|
| [3] |
LIU Zhi, WU Xuegang, NI Jie, et al. Driving intention recognition based on HMM and SVM cascade algorithm[J]. Autom Engineering, 2018, 40(7): 858-864.
|
| [4] |
黄慧玲, 杨明, 王春香, 等. 基于前方车辆行为识别的碰撞预警系统[J]. 华中科技大学学报(自然科学版), 2015, 43(S1): 117-121.
|
|
HUANG Huiling, YANG Ming, WANG Chunxiang, et al. Collision warning system based on forward vehicle behavior recognition[J]. J Huazhong Univ Sci Tech (Nat Sci Edit), 2015, 43(S1) : 117-121. (in Chinese)
|
| [5] |
党彤. 基于贝叶斯网络的车辆变道行为分析[D]. 西安: 西安理工大学, 2018.
|
|
DANG Tong. Analysis of vehicle lane change behavior based on Bayesian network[D]. Xi'an: Xi'an University of Technology, 2018. (in Chinese)
|
| [6] |
卫星, 乐越, 韩江洪, 等. 基于长短期记忆的车辆行为动态识别网络[J]. 计算机应用, 2019, 39(7): 1894-1898.
doi: 10.11772/j.issn.1001-9081.2018122448
|
|
WEI Xing, LE Yue, HAN Jianghong, et al. Vehicle behavior dynamic recognition network based on long short-term memory[J]. J Comp Appl, 2019, 39(7): 1894-1898. (in Chinese)
|
| [7] |
季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6): 34-42.
doi: 10.19721/j.cnki.1001-7372.2019.06.003
|
|
JI Xuewu, FEI Cong, HE Xiangkun, et al. Driving intention recognition and vehicle trajectory prediction based on LSTM network[J]. Chin J Highw Transport, 2019, 32(6): 34-42. (in Chinese)
doi: 10.19721/j.cnki.1001-7372.2019.06.003
|
| [8] |
蔡英凤, 邰康盛, 王海, 等. 无人驾驶汽车周边车辆行为识别算法研究[J]. 汽车工程, 2020, 42(11): 1464-1472.
doi: 10.19562/j.chinasae.qcgc.2020.11.003
|
|
Cai Yingfeng, Tai Kangsheng, Wang Hai et al. Research on behavior recognition algorithm of surrounding vehicles for driverless ca[J]. Autom Engineering, 2020, 42(11): 1464-1472. (in Chinese)
|
| [9] |
MOU Luntian, XIE Haitao, MAO Shasha, et al. Vision-based vehicle behaviour analysis: A structured learning approach via convolutional neural networks[J]. IET Intel Transport Syst, 2020, 14(7): 792-801.
|
| [10] |
Krajewski R, Bock J, Kloeker L, et al. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]// 2018 21st Int’l Conf Intel Transp Syst (ITSC), 2018: 2118-2125.
|
| [11] |
Geiger A, Lenz P, Urtasun R. Are we ready for autonomous driving? the KITTI vision benchmark suite[C]// 2012 IEEE Conf Comp Visi Patt Recog, 2012: 3354-3361.
|
| [12] |
YU Fisher, CHEN Haofeng, WANG Xin, et al. BDD100K: A diverse driving dataset for heterogeneous multitask learning[C]//Proc IEEE/CVF Conf Comp Visi Patt Recog, 2020: 2636-2645.
|
| [13] |
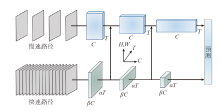
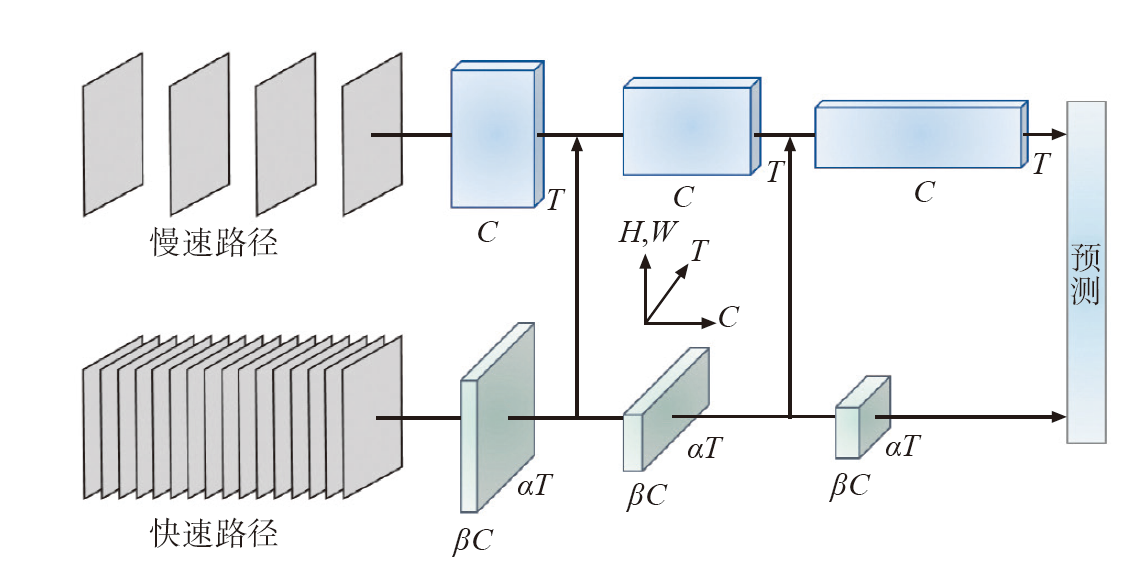
Feichtenhofer C, FAN Haoqi, Malik J, et al. Slowfast networks for video recognition[C]// Proc IEEE/CVF Int’l Conf Comp Visi, 2019: 6202-6211.
|
| [14] |
Carreira J, Zisserman A. Quo vadis, action recognition? A new model and the kinetics dataset[C]// Proc IEEE Conf Comp Visi Patt Recog, 2017: 6299-6308.
|
| [15] |
HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]// Pro IEEE Conf Comp Visi Patt Recog, 2016: 770-778.
|
| [16] |
LIN Tsung-Yi, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]// Proc IEEE Int’l Conf Comp Visi, 2017: 2980-2988.
|
| [17] |
WANG Xiaolong, Girshick R, Gupta A, et al. Non-local neural networks[C]// Proc IEEE Conf Comp Visi Patt Recog, 2018: 7794-7803.
|
 ), 黄志明1,2, 高博麟2,*(
), 黄志明1,2, 高博麟2,*(