欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (3): 452-462.DOI: 10.3969/j.issn.1674-8484.2025.03.011
刘国盛1( ), 苏欣儿2, 王建锋1,*(), 刘臻玮1
), 苏欣儿2, 王建锋1,*(), 刘臻玮1
收稿日期:2024-11-09
修回日期:2024-12-12
出版日期:2025-06-30
发布日期:2025-07-01
通讯作者:
王建锋,教授。E-mail:作者简介:刘国盛(2001—),男(汉),江苏,硕士研究生。E-mail:lgs15805127048@163.com。
基金资助:
LIU Guosheng1(), SU Xiner2, WANG Jianfeng1,*(), LIU Zhenwei1
Received:2024-11-09
Revised:2024-12-12
Online:2025-06-30
Published:2025-07-01
摘要:
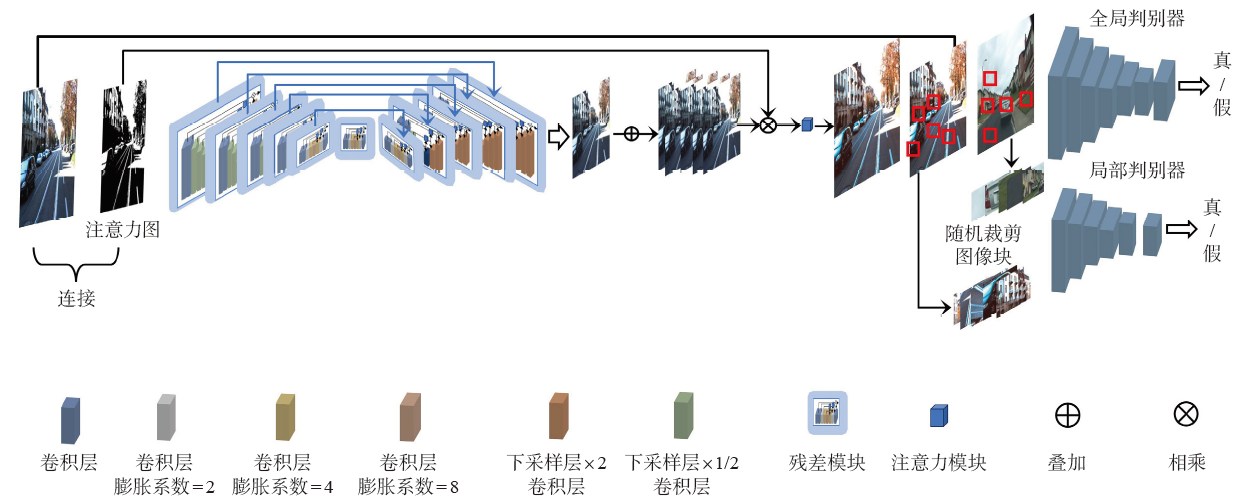
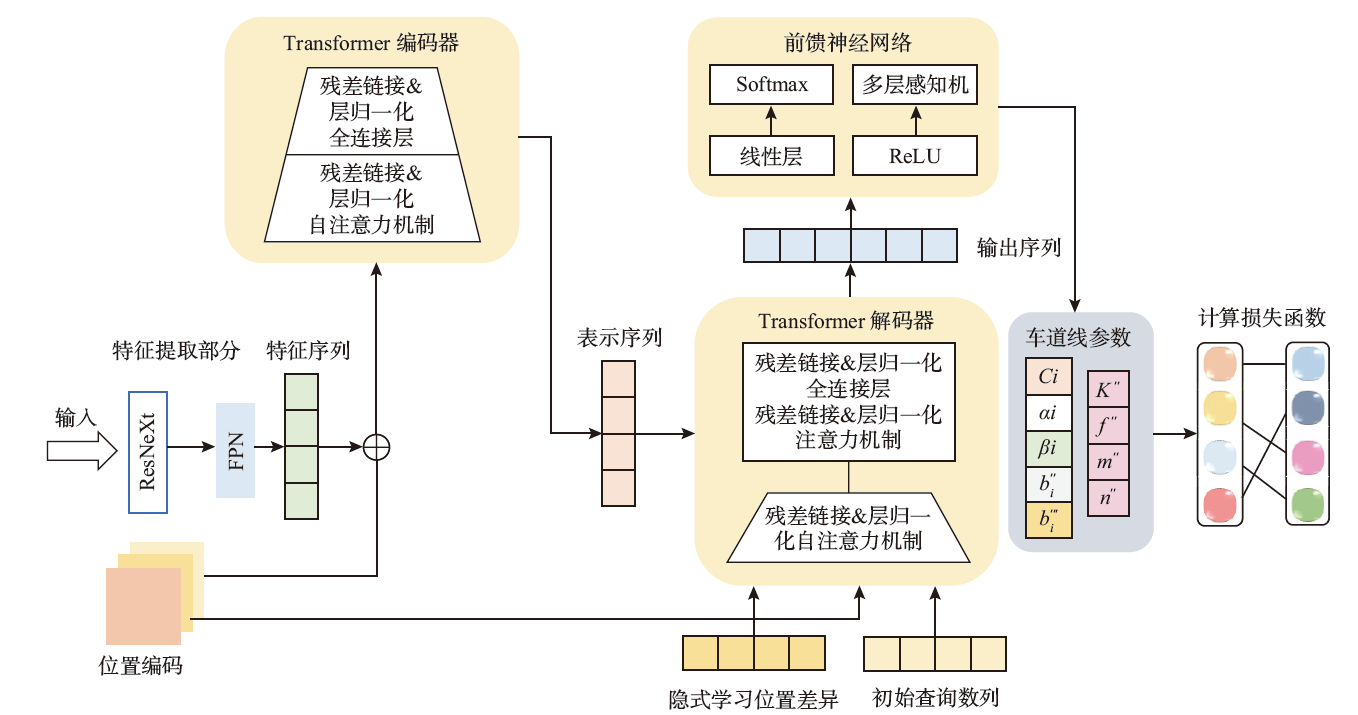
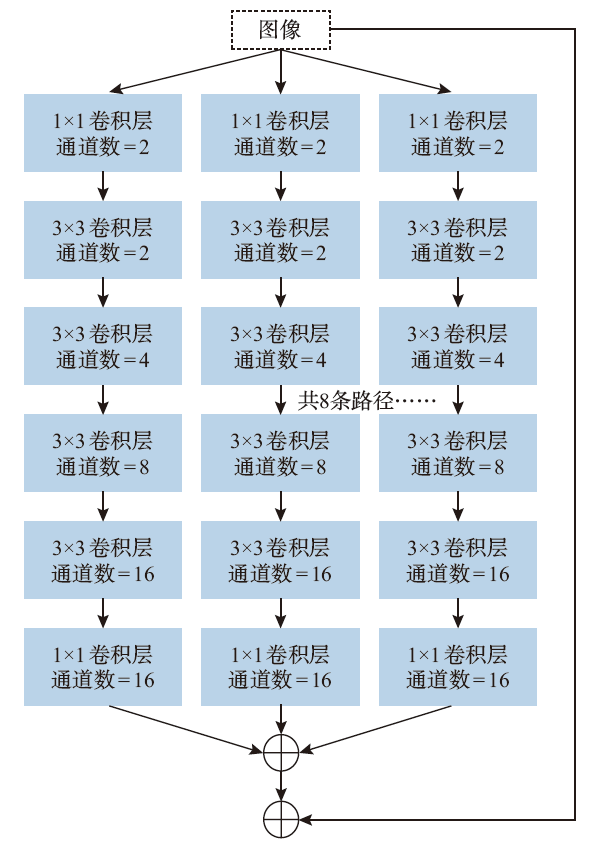
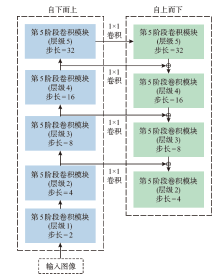
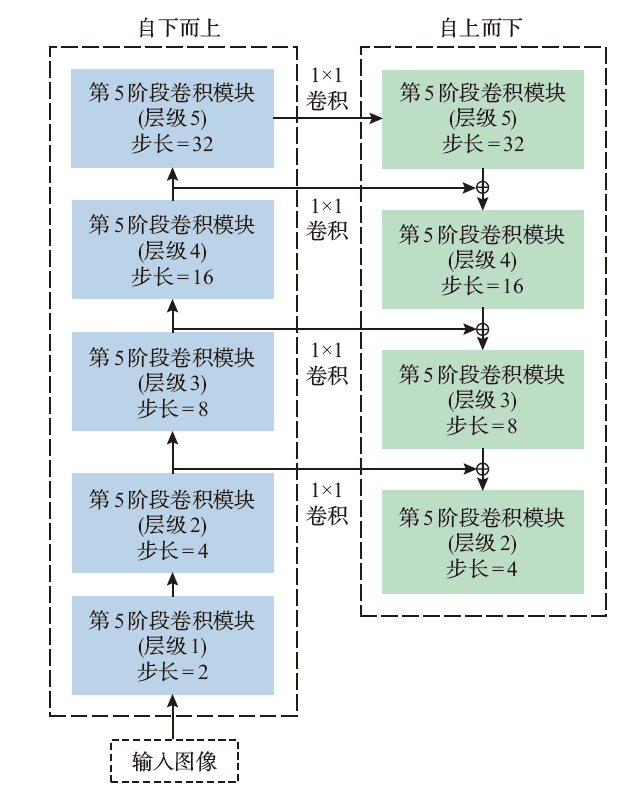
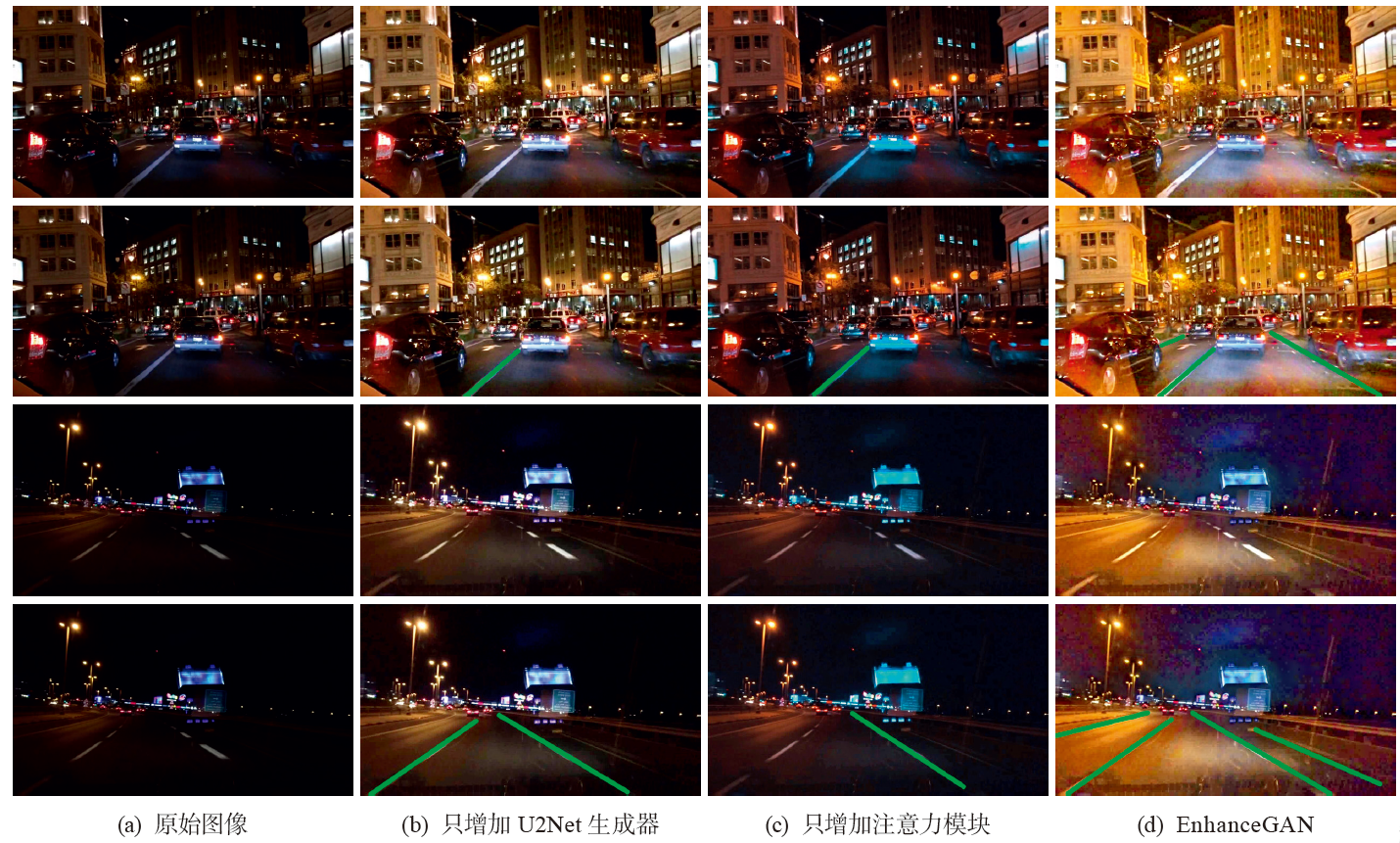
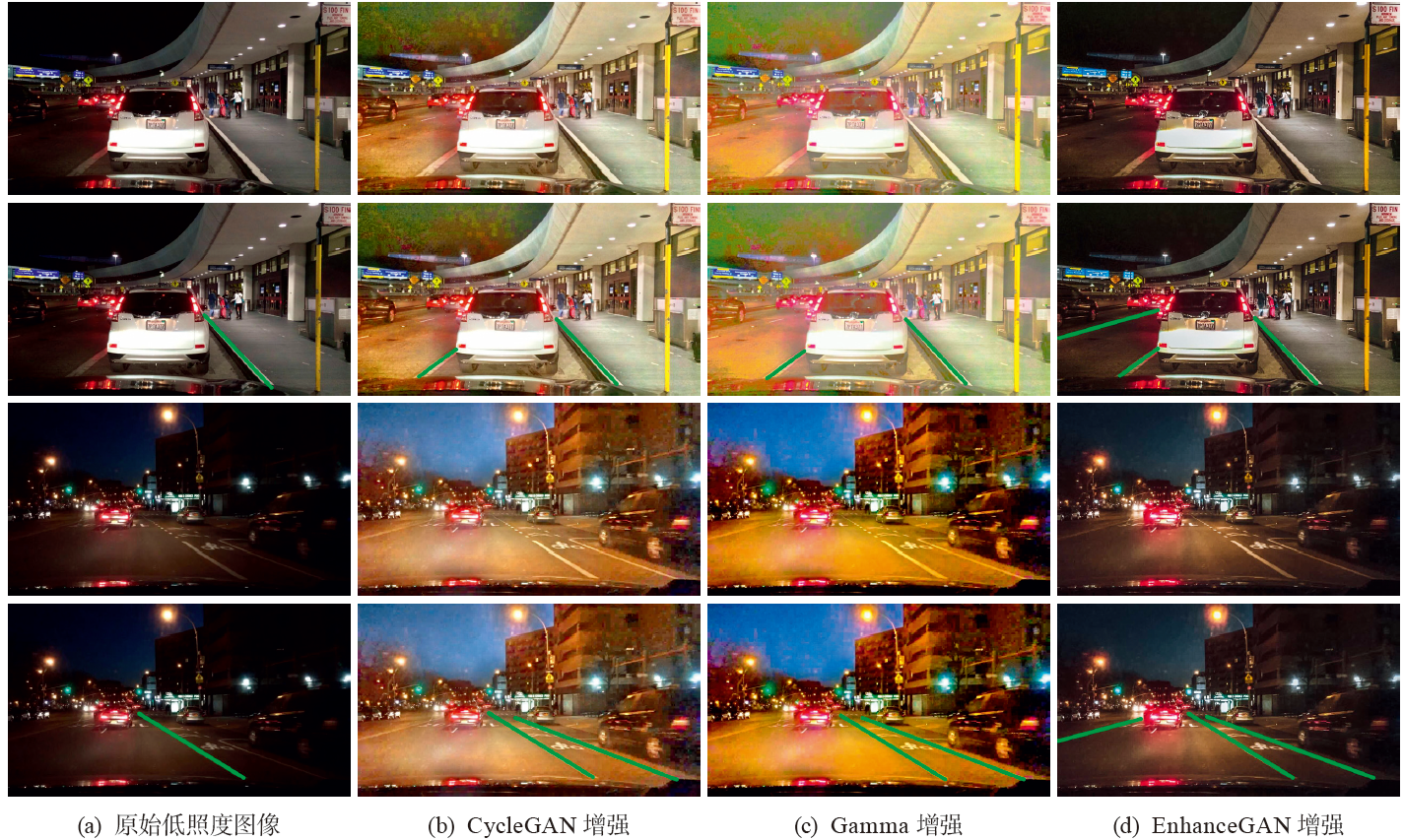
为保障夜间车辆的安全行驶,准确识别夜间车道线并做出车道偏离预警,提出了用于夜间图像增强的深度生成网络EnhanceGAN和基于Transformer的端到端车道线检测网络AttentiveLSTR的夜间车道线检测方法,并进行实车实验。深度生成网络EnhanceGAN将改进后的UNet作为网络的生成器,采用两层嵌套的U形结构扩大感受野,添加Markov局部判别器和组合损失函数增强车道线边缘、纹理等细节信息;车道线检测网络AttentiveLSTR使用ResNeXt作为特征提取网络来保证网络深度和降低模型参数量,引入特征金字塔网络(FPN)提取车道线边缘和形状信息。 结果表明:与主流方法CycleGAN和Gamma校正相比,该方法在BDD100k数据集上的夜间图像增强的效果更好,车道线和周围环境对比度高,结构相似性(SSIM)为0.8834,图像整体自然逼真,峰值信噪比(PSNR)为40.2654, 自然图像质量评估指标(NIQE)为3.4233;在CULane数据集上检测精度(Acc)为 90.12%,处理速度较快,每秒帧数(FPS)为82帧。该研究结果可以为夜间行驶车道线偏离场景提供参考。
中图分类号:
刘国盛, 苏欣儿, 王建锋, 刘臻玮. 基于深度生成网络的夜间车道线检测方法[J]. 汽车安全与节能学报, 2025, 16(3): 452-462.
LIU Guosheng, SU Xiner, WANG Jianfeng, LIU Zhenwei. Night lane detection method based on deep generation network[J]. Journal of Automotive Safety and Energy, 2025, 16(3): 452-462.




| 评价指标 | PSNR | SSIM | NIQE | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|
| 原始图像 | 4.152 2 | 83.72 | 21.96 | 25.09 | ||
| 只增加注意力模块 | 29.828 2 | 0.572 8 | 3.808 3 | 85.81 | 18.46 | 18.51 |
| 只增加U2Net生成器 | 30.342 1 | 0.791 6 | 3.632 1 | 86.31 | 33.01 | 19.02 |
| EnhanceGAN | 32.441 3 | 0.898 8 | 3.201 2 | 88.76 | 16.1 4 | 17.99 |
| 评价指标 | PSNR | SSIM | NIQE | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|
| 原始图像 | 4.152 2 | 83.72 | 21.96 | 25.09 | ||
| 只增加注意力模块 | 29.828 2 | 0.572 8 | 3.808 3 | 85.81 | 18.46 | 18.51 |
| 只增加U2Net生成器 | 30.342 1 | 0.791 6 | 3.632 1 | 86.31 | 33.01 | 19.02 |
| EnhanceGAN | 32.441 3 | 0.898 8 | 3.201 2 | 88.76 | 16.1 4 | 17.99 |

| 评价指标 | PSNR | SSIM | NIQE | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|
| 原始图像 | 4.453 1 | 83.72 | 21.96 | 25.09 | ||
| CycleGAN | 35.337 8 | 0.782 2 | 3.675 2 | 86.87 | 19.72 | 21.14 |
| Gamma校正 | 34.219 8 | 0.690 3 | 3.821 5 | 87.21 | 18.89 | 19.94 |
| EnhanceaGAN | 40.265 4 | 0.883 4 | 3.423 3 | 88.76 | 16.14 | 17.99 |
| 评价指标 | PSNR | SSIM | NIQE | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|
| 原始图像 | 4.453 1 | 83.72 | 21.96 | 25.09 | ||
| CycleGAN | 35.337 8 | 0.782 2 | 3.675 2 | 86.87 | 19.72 | 21.14 |
| Gamma校正 | 34.219 8 | 0.690 3 | 3.821 5 | 87.21 | 18.89 | 19.94 |
| EnhanceaGAN | 40.265 4 | 0.883 4 | 3.423 3 | 88.76 | 16.14 | 17.99 |

| 平台 | 模型 | Acc % | FP % | FN % | Parameter | FPS (帧 · s-1) |
|---|---|---|---|---|---|---|
| PC | LSTR | 87.20 | 7.62 | 4.30 | 765 787 | 137 |
| 本文 | 90.12 | 2.92 | 3.41 | 2 808 015 | 82 | |
| 工控机 | LSTR | 86.36 | 9.42 | 8.67 | 765 787 | 78 |
| 本文 | 89.51 | 6.23 | 3.79 | 2 808 015 | 51 |
| 平台 | 模型 | Acc % | FP % | FN % | Parameter | FPS (帧 · s-1) |
|---|---|---|---|---|---|---|
| PC | LSTR | 87.20 | 7.62 | 4.30 | 765 787 | 137 |
| 本文 | 90.12 | 2.92 | 3.41 | 2 808 015 | 82 | |
| 工控机 | LSTR | 86.36 | 9.42 | 8.67 | 765 787 | 78 |
| 本文 | 89.51 | 6.23 | 3.79 | 2 808 015 | 51 |
| 序号 | 偏离 次数 | 正确预 警次数 | 误警 次数 | 漏警 次数 | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|---|
| 1 | 128 | 119 | 3 | 9 | 92.96 | 2.34 | 7.03 |
| 2 | 326 | 308 | 9 | 18 | 93.90 | 2.74 | 5.48 |
| 3 | 792 | 742 | 23 | 50 | 93.68 | 2.90 | 6.31 |
| 4 | 67 | 62 | 2 | 5 | 92.53 | 2.98 | 7.46 |
| 5 | 237 | 217 | 7 | 20 | 91.56 | 2.95 | 8.43 |
| 6 | 23 | 20 | 2 | 3 | 86.95 | 8.69 | 13.04 |
| 序号 | 偏离 次数 | 正确预 警次数 | 误警 次数 | 漏警 次数 | Acc / % | FP / % | FN / % |
|---|---|---|---|---|---|---|---|
| 1 | 128 | 119 | 3 | 9 | 92.96 | 2.34 | 7.03 |
| 2 | 326 | 308 | 9 | 18 | 93.90 | 2.74 | 5.48 |
| 3 | 792 | 742 | 23 | 50 | 93.68 | 2.90 | 6.31 |
| 4 | 67 | 62 | 2 | 5 | 92.53 | 2.98 | 7.46 |
| 5 | 237 | 217 | 7 | 20 | 91.56 | 2.95 | 8.43 |
| 6 | 23 | 20 | 2 | 3 | 86.95 | 8.69 | 13.04 |
| [1] | 高轶男, 巩建强. 我国道路交通事故特征及致因分析[J]. 安全与环境学报, 2023, 23(11): 4013-4023. |
| GAO Yinan, GONG Jianqiang. Characteristics and mechanism of road traffic accidents[J]. J Safe Environ, 2023, 23(11): 4013-4023. (in Chinese) | |
| [2] | 李福俊, 顾敏明. 车道线实时检测与偏离预警系统设计与研究[J]. 光电子激光, 2018, 29(3): 298-304. |
| LI Fujun, GU Minming. Design and research on lane detection and the departure warning system[J]. J Optoelect Lase, 2018, 29(3): 298-304. (in Chinese) | |
| [3] | Kang J, Yoon T, Kim E, et al. Lane-level map-matching method for vehicle localization using GPS and camera on a high-definition map[J]. Sensors, 2020, 20(8): 2166-2188. |
| [4] | Rastiveis H, Shams A, Sarasua W, et al. Automated extraction of lane markings from mobile LiDAR point clouds based on fuzzy inference[J]. ISPRS J Photogram Remo Sens, 2019, 160: 149-166. |
| [5] | Munir F, Azam S, Jeon M, et al. LDNet: End-to-end lane marking detection approach using a dynamic vision sensor[J]. IEEE Trans Intel Transport Syst, 2021, 23(7): 9318-9334. |
| [6] | Ding D, Lee C, Lee K-Y. An adaptive road ROI determination algorithm for lane detection[C]// 2013 IEEE Int’l Conf IEEE Regi 10 (TENCON 2013), Xi'an, China, 2013: 1-4. |
| [7] | FU Mengyin, WANG Xinyu, MA Hongbin, et al. Multi-lanes detection based on panoramic camera[C]// 11th IEEE Int’l Conf Contr Auto (ICCA), Taichung, Taiwan, 2014: 655-660. |
| [8] | 陈洋, 黄孝慈, 吴训成. 基于改进卡尔曼滤波的车道线与车辆跟踪系统算法研究[J]. 计算机与数字工程, 2021, 49(7): 1363-1366. |
| CHNEG Yang, HUANG Xiaoci, WU Xuncheng. Research on algorithm of lane line and vehicle tracking system based on improved Kalman filter[J]. Comput Digit Engi, 2021, 49(7): 1363-1366. (in Chinese) | |
| [9] | Kim J-G, Yoo J-H, Koo J-C. Road and lane detection using stereo camera[C]// 2018 IEEE Int’l Conf Big Data Smart Comput (Big Comp), Shanghai, China, 2018: 649-652. |
| [10] | 杨淑琴, 马玉浩, 方铭宇, 等. 基于实例分割的复杂环境车道线检测方法[J]. 浙江大学学报, 2022, 56(4): 809-815. |
| YANG Shuqi, MA Yuhao, FANG Minyu, et al. Lane detection method in complex environments based on instance segmentation[J]. J Zhejiang University, 2022, 56(4): 809-815. (in Chinese) | |
| [11] | YAO Yifan, XIONG Huilin. LaneFormer: An efficient transformer-based network for fast lane detection[C]// 2022 China Auto Congress (CAC), Xiamen, 2022: 3111-3116. |
| [12] | LI Xiang, LI Jun, HU Xiaolin, et al. Line-CNN: End-to-end traffic line detection with line proposal unit[J]. IEEE Trans Intel Transport Syst, 2019, 21(1): 1-11. |
| [13] | 宋扬, 李竹. 基于深度图像增强的夜间车道线检测技术[J]. 计算机应用, 2019, 39(S2): 103-106. |
| SONG Yang, LI Zhu. Lane detection method based on image enhancement technique under night condition[J]. J Comput Appl, 2019, 39(S2): 103-106. (in Chinese) | |
| [14] |
郭克友, 王艺伟, 郭晓丽. LDA 与 LSD 相结合的车道线分类检测算法[J]. 计算机工程与应用, 2017, 53(24): 219-225.
doi: 10.3778/j.issn.1002-8331.1606-0116 |
| GUO Keyo, WANG Yiwei, GUO Xiaoli. Lane classification algorithm combined LDA and LSD[J]. Comput Engi Appl, 2017, 53(24): 219-225. (in Chinese) | |
| [15] | HE Gaoming, WANG Mei. Research on lane detection algorithm based on wavelet analysis and hough transform[C]// 2022 IEEE 21st Int’l Conf Ubiquit Comput Commun (IUCC/CIT/DSCI/SmartCNS), Chongqing: IEEE Press, 2022: 280-287. |
| [16] | CHEN Yiman, XIANG Zhiyu, DU Wentao. Improving lane detection with adaptive homography prediction[J]. Visu Comput, 2023, 39(2): 585-591. |
| [17] | LI Shoubiao, WU Xin, WU Zhifei, et al. Efficient multi-lane detection based on large-kernel convolution and location[J]. IEEE Access, 2023, 11: 58125-58135. |
| [18] | LIU Ruijin, YUAN Zejian, LIU Tie, et al. End-to-end lane shape prediction with transformers[C]// 2021 IEEE Winter Conf Appl Comput Visi (WACV), Waikoloa: IEEE Press, 2021: 3693-3701. |
| [19] | GAO Rong, HU Siqi, YAN Lingyu, et al. High-order deep infomax-guided deformable transformer network for efficient lane detection[J]. Sign, Imag Vide Proc, 2023, 17(6): 3045-3052. |
| [20] | 王杰, 陈黎卿, 黄莉莉, 等. 基于Retinex的弱光条件下车道线识别方法[J]. 计算机与数字工程, 2019, 47(2): 451-456. |
| WANG Jie, CHEN Liqi, HUANG Lili. Lane Recognition method in weak light condition based on Retinex[J]. Comput Digit Engi, 2019, 47(2): 451-456. (in Chinese) | |
| [21] | MA Hui, LÜ Wenhao, LI Yu, et al. Image adaptive contrast enhancement for low-illumination lane lines based on improved retinex and guided filter[J]. Appl Artifi Intel, 2021, 35(15): 1970-1989. |
| [22] |
周经美, 王钰, 宁航, 等. 面向多元场景结合GLNet的车道线检测算法[J]. 中国公路学报, 2021, 34(7): 118-127.
doi: 10.19721/j.cnki.1001-7372.2021.07.009 |
| ZHOU Jingmei, WANG Yu, NING Hang, et al. Lane detection algorithm based on GLNet for multiple scenes[J]. China J Highw Transport, 2021, 34(7): 118-127. (in Chinese) | |
| [23] | Son J, Yoo H, Kim S, et al. Real-time illumination invariant lane detection for lane departure warning system[J]. Expet Syst Appl, 2015, 42(4): 1816-1824. |
| [1] | 李宜轩, 吴肖, 唐凯, 李政. 小偏置碰撞测试中纯电动车辆侧滑策略研究[J]. 汽车安全与节能学报, 2025, 16(6): 867-876. |
| [2] | 关永学, 刘森海, 韩勇, 徐莉, 舒伟斌, 樊晨旭. 面向多障碍物场景的车辆紧急避撞耦合决策与轨迹规划方法[J]. 汽车安全与节能学报, 2025, 16(6): 945-954. |
| [3] | 程泽阳, 段奕阳, 杨蒙蒙, 冯忠祥, 王鹤, 朱晓俊, 保丽霞. 基于混合神经网络的交织区危险驾驶与风格的识别[J]. 汽车安全与节能学报, 2025, 16(5): 688-697. |
| [4] | 邓功勋, 蔡娅妮, 雷飞兵, 刘恒金, 漆露霖, 樊瑜波. 汽车碰撞强度和先进约束系统参数对乘员损伤的影响[J]. 汽车安全与节能学报, 2025, 16(5): 698-706. |
| [5] | 李昊, 周浩. 基于声学频谱-时域信息融合的噪声环境中应急车辆检测[J]. 汽车安全与节能学报, 2025, 16(4): 529-538. |
| [6] | 朱慧婷, 牟燕燕, 兰晹, 项磊, 杨洁, 程志华, 王军良, 杨娜. 追尾碰撞下车用机械按摩座椅对乘员损伤的防护效果[J]. 汽车安全与节能学报, 2025, 16(4): 539-547. |
| [7] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [8] | 高超俊, 李祎承, 蔡英凤, 王海, 蒋金. 基于融合感知的自动驾驶汽车AEB控制研究[J]. 汽车安全与节能学报, 2025, 16(4): 629-637. |
| [9] | 房熙博, 宁一高, 赵轩, 周猛. 基于SQP和GRNN的商用客车动力学参数自适应辨识[J]. 汽车安全与节能学报, 2025, 16(4): 648-656. |
| [10] | 刘煜, 张辉达, 邬晓凡, 蒋韩, 李桂兵. 多种碰撞工况下的中国与西方体征驾驶员响应对比分析[J]. 汽车安全与节能学报, 2025, 16(3): 376-385. |
| [11] | 邹铁方, 付玺郡, 李艳春. 基于投影警示的智能汽车分级预警制动系统[J]. 汽车安全与节能学报, 2025, 16(3): 405-413. |
| [12] | 王一飞, 李勇杭, 张雅丽, 王畅, 王泰琪, 袁华智. 基于自适应分割网络的隧道车道线检测[J]. 汽车安全与节能学报, 2025, 16(3): 478-486. |
| [13] | 刘育秋, 唐亮, 王宁珍. 基于视觉的汽车检测系统物理对抗攻击[J]. 汽车安全与节能学报, 2025, 16(1): 50-56. |
| [14] | 易文韬, 唐颖, 雷飞兵, 曾董, 蔡娅妮, 罗斌尹. 侧柱碰撞中头部运动学特征对弥散性脑损伤的影响[J]. 汽车安全与节能学报, 2025, 16(1): 66-76. |
| [15] | 狄亚格, 周健, 陆杰, 秦嘉, 魏妤沁, 王淙进, 郝朝阳, 缪雪龙. 基于整车动力学的EMB线控制动系统功能安全概念设计[J]. 汽车安全与节能学报, 2024, 15(6): 830-838. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||