欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (2): 334-343.DOI: 10.3969/j.issn.1674-8484.2025.02.017
• 智能驾驶与智慧交通 • 上一篇
杨俊儒1( ), 郑四发1,2,*(), 许述财1,2, 田野3, 孙剑3, 孙川1, 李浩然1
), 郑四发1,2,*(), 许述财1,2, 田野3, 孙剑3, 孙川1, 李浩然1
收稿日期:2025-01-21
修回日期:2025-02-27
出版日期:2025-04-30
发布日期:2025-04-22
通讯作者:
* 郑四发,教授。E-mail:zsf@tsinghua.edu.cn。
作者简介:杨俊儒(1994—),男(汉),湖北,博士。E-mail:yangjunru@tsari.tsinghua.edu.cn。
基金资助:
YANG Junru1(), ZHENG Sifa1,2,*(), XU Shucai1,2, TIAN Ye3, SUN Jian3, SUN Chuan1, LI Haoran1
Received:2025-01-21
Revised:2025-02-27
Online:2025-04-30
Published:2025-04-22
摘要:
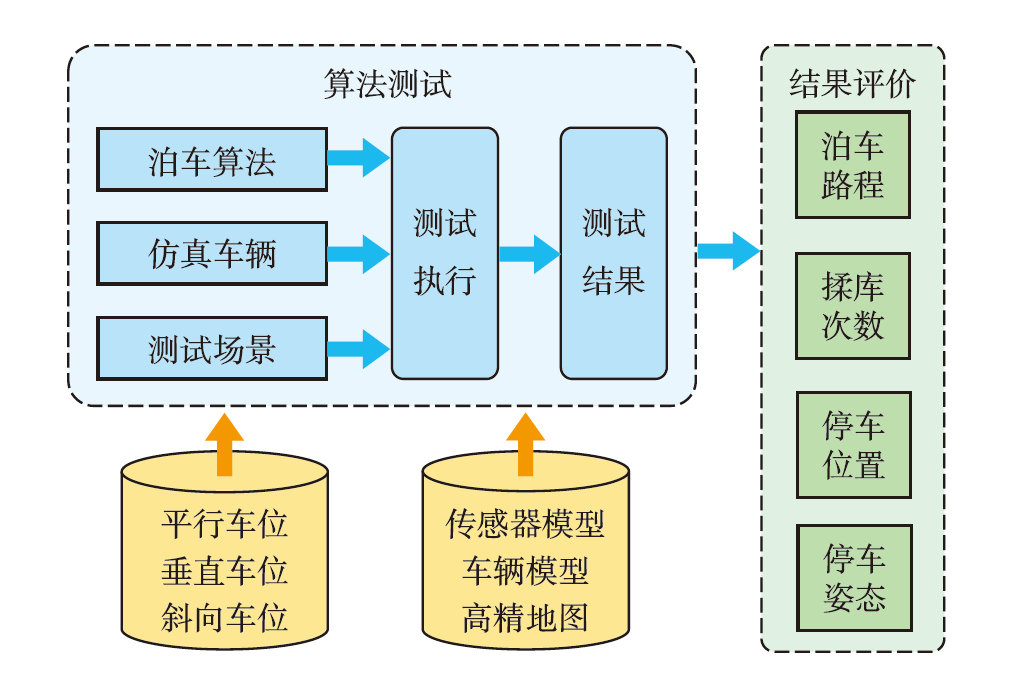
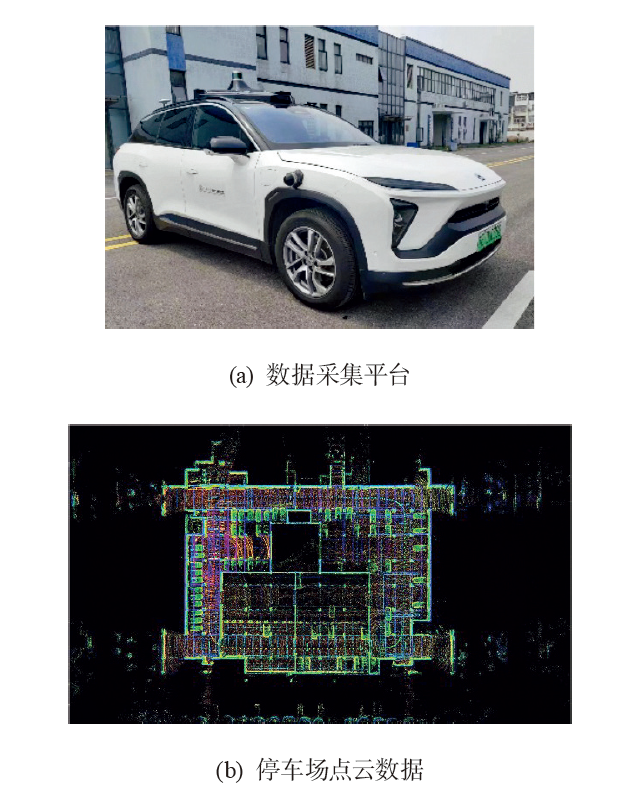
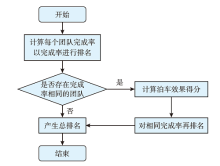
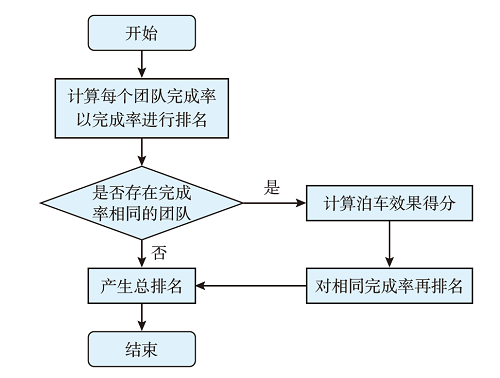
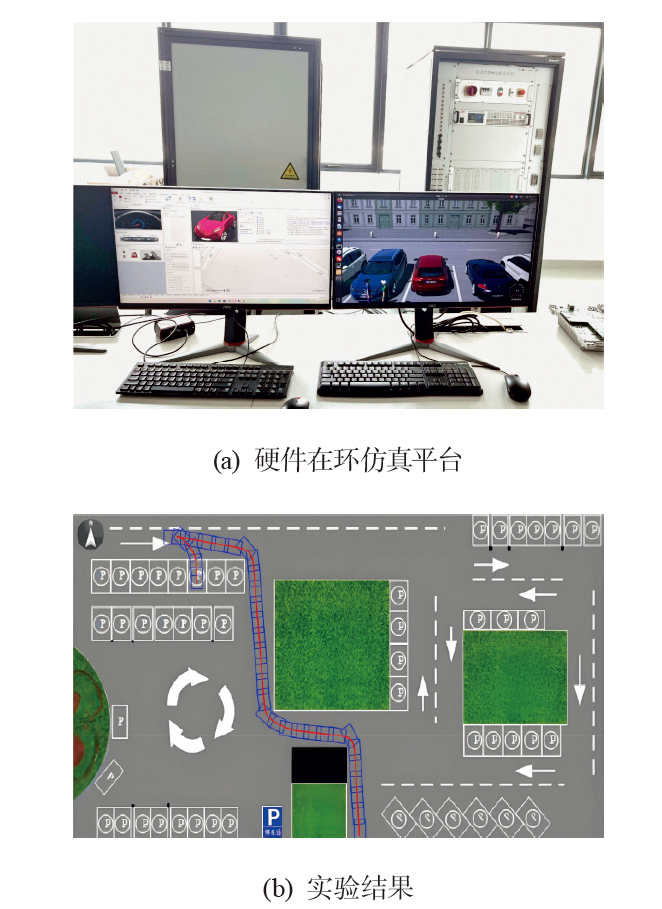
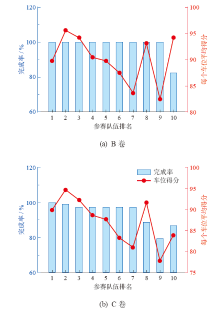
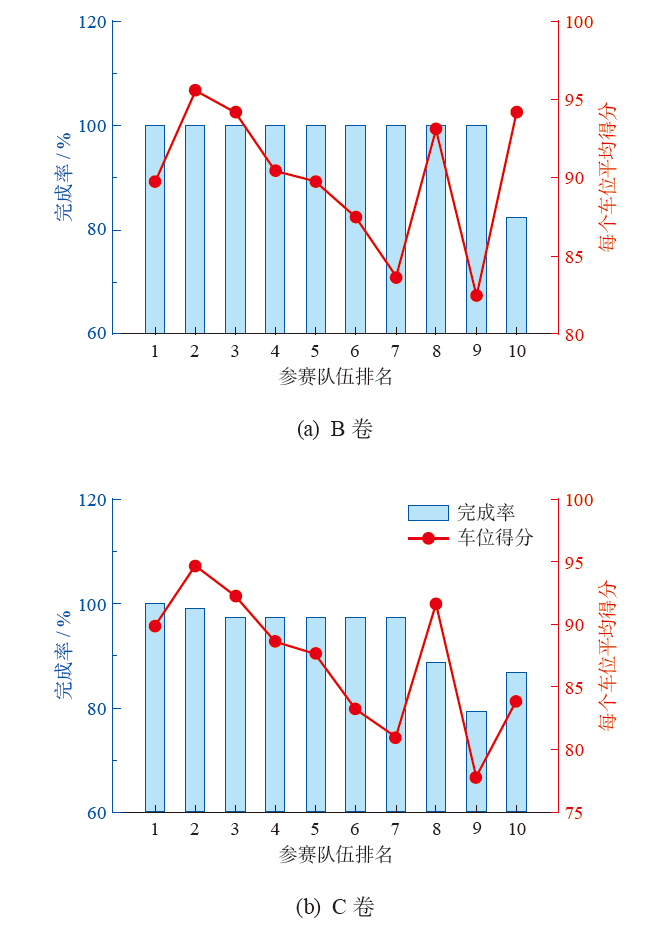
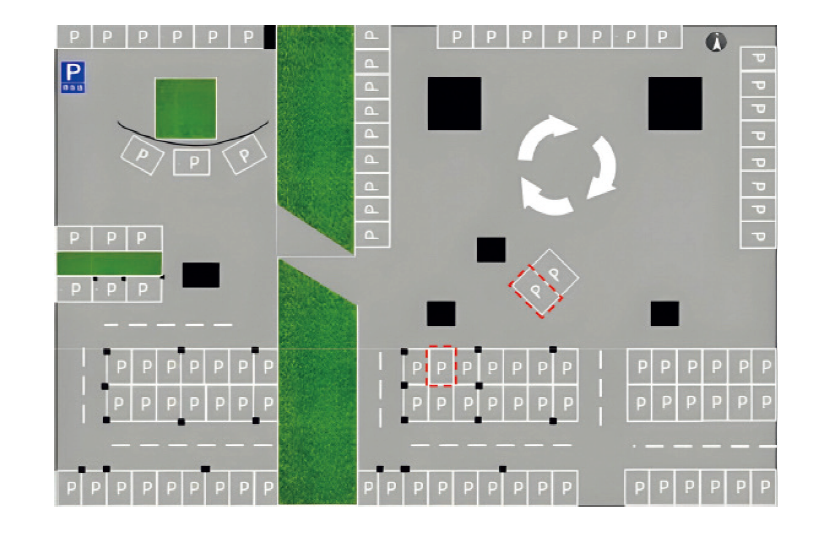
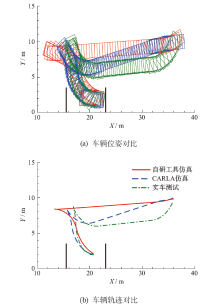
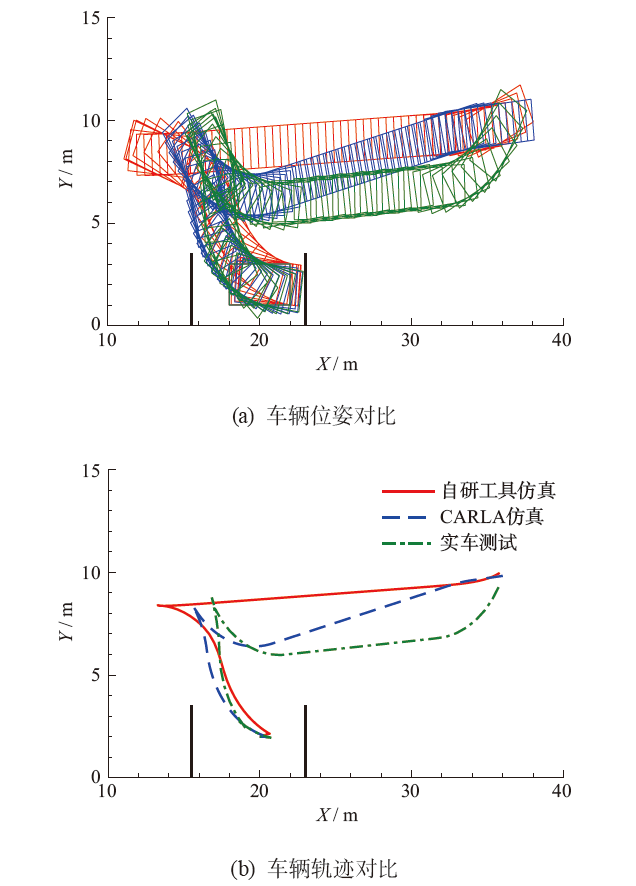
为了完善“公开自然驾驶智能汽车仿真测试环境(OnSite)”平台功能,提出了一种自动泊车的测评工具。该工具采用实车数据采集与建模还原的场景构建方法,依据行业标准与停车位数据,建立了更为全面的测试场景库。提出了一种以完成率为核心,兼顾安全性、效率与精准度的多维评价体系。该测评工具经硬件在环仿真,并与CARLA仿真平台及实车测试结果对比。通过分析第2届OnSite自动驾驶算法挑战赛泊车测试前10名队伍的得分,讨论了未来测评工具及OnSite平台发展。结果表明:该工具不仅为自动泊车功能优化提供科学依据,也可为自动驾驶测评工具研发提供参考。
中图分类号:
杨俊儒, 郑四发, 许述财, 田野, 孙剑, 孙川, 李浩然. 基于OnSite平台的自动泊车测评工具的研究与设计[J]. 汽车安全与节能学报, 2025, 16(2): 334-343.
YANG Junru, ZHENG Sifa, XU Shucai, TIAN Ye, SUN Jian, SUN Chuan, LI Haoran. Design and research of an automated parking evaluation tool based on the OnSite platform[J]. Journal of Automotive Safety and Energy, 2025, 16(2): 334-343.


| 车位类型 | 车位场景 | 自动泊车系统试验标准 | 本文研究团队 | ||
|---|---|---|---|---|---|
| ISO 16787 | GB/T 41630-2022 | IVISTA-SM-IPI.PA-TP-A0-2023 | |||
| 1 平行车位 | 1.1 双边界平行车位 | ● | ● | ● | ● |
| 1.2 白色标线平行车位 | ● | ● | ● | ● | |
| 1.3 弯道平行车位 | ● | ||||
| 2 垂直车位 | 2.1 双边界垂直车位 | ● | ● | ● | ● |
| 2.2 白色标线垂直车位 | ● | ● | ● | ● | |
| 2.3 左侧方柱垂直车位 | ● | ● | |||
| 2.4 右侧方柱垂直车位 | ● | ||||
| 2.5 两侧方柱垂直车位 | ● | ||||
| 3 斜向车位 | 3.1 双边界斜向车位 | ● | ● | ||
| 3.2 白色标线斜向车位 | ● | ● | |||
| 车位类型 | 车位场景 | 自动泊车系统试验标准 | 本文研究团队 | ||
|---|---|---|---|---|---|
| ISO 16787 | GB/T 41630-2022 | IVISTA-SM-IPI.PA-TP-A0-2023 | |||
| 1 平行车位 | 1.1 双边界平行车位 | ● | ● | ● | ● |
| 1.2 白色标线平行车位 | ● | ● | ● | ● | |
| 1.3 弯道平行车位 | ● | ||||
| 2 垂直车位 | 2.1 双边界垂直车位 | ● | ● | ● | ● |
| 2.2 白色标线垂直车位 | ● | ● | ● | ● | |
| 2.3 左侧方柱垂直车位 | ● | ● | |||
| 2.4 右侧方柱垂直车位 | ● | ||||
| 2.5 两侧方柱垂直车位 | ● | ||||
| 3 斜向车位 | 3.1 双边界斜向车位 | ● | ● | ||
| 3.2 白色标线斜向车位 | ● | ● | |||
| 评价内容 | 指标 | 分值 | 得分标准 |
|---|---|---|---|
| 1 泊车效率 (60分) | 1.1 泊车路程 | 30分 | 20×(目标车位参考路程/实际行驶路程),最低0分 |
| 1.2 揉库次数 | 30分 | 揉库1次不扣分,每多1次扣2分,扣完为止 | |
| 2 位置姿态 (40分) | 2.1 停车位置 | 20分 | 车辆中心点与停车位中心点的距离偏差,每差2 cm 扣1分,扣完为止 |
| 2.2 停车姿态 | 20分 | 车辆最终航向角与停车位航向角偏差,每差0.5° 扣2分,扣完为止 |
| 评价内容 | 指标 | 分值 | 得分标准 |
|---|---|---|---|
| 1 泊车效率 (60分) | 1.1 泊车路程 | 30分 | 20×(目标车位参考路程/实际行驶路程),最低0分 |
| 1.2 揉库次数 | 30分 | 揉库1次不扣分,每多1次扣2分,扣完为止 | |
| 2 位置姿态 (40分) | 2.1 停车位置 | 20分 | 车辆中心点与停车位中心点的距离偏差,每差2 cm 扣1分,扣完为止 |
| 2.2 停车姿态 | 20分 | 车辆最终航向角与停车位航向角偏差,每差0.5° 扣2分,扣完为止 |



| [1] | 李平飞, 金思雨, 胡文浩, 等. 用于自动驾驶仿真测试的车—车事故场景复杂度评价[J]. 汽车安全与节能学报, 2022, 13(4): 697-704. |
| LI Pingfei, JIN Siyu, HU Wenhao, et al. Complexity evaluation of vehicle-vehicle accident scenarios for autonomous driving simulation tests[J]. J Autom Safe Energ, 2022, 13(4): 697-704. (in Chinese) | |
| [2] | Steimle M, Weber N, Maurer M. Toward generating sufficiently valid test case results: A method for systematically assigning test cases to test bench configurations in a scenario-based test approach for automated vehicles[J]. IEEE Access, 2022, 10: 6260-6285. |
| [3] | 张培兴. 基于场景的自动驾驶汽车虚拟仿真加速测试与评价方法研究[D]. 长春: 吉林大学, 2023. |
| ZHANG Peixin. Research on scenario-based accelerated simulation test and evaluation method for automated vehicle[D]. Changchun: Jilin University, 2023. (in Chinese) | |
| [4] | 王之中, 皮大伟, 吴兵. 国家自然科学基金委员会交通与运载工程学科2021年度管理工作综述与未来工作展望[J]. 交通运输工程学报, 2021, 21(6): 1-7. |
| WANG Zhizhong, PI Dawei, WU Bing. Management summary of transportation and vehicle engineering discipline in NSFC: review and prospects in 2021[J]. J Traf Transport Eng, 2021, 21(6): 1-7. (in Chinese) | |
| [5] | 王之中, 田野, 孙剑, 等. 自动驾驶测试公共服务平台建设与思考[J]. 交通运输工程学报, 2023, 23(6): 1-9. |
| WANG Zhizhong, TIAN Ye, SUN Jian, et al. Construction and rethinking on public service platform for autonomous driving test[J]. J Traf Transport Eng, 2023, 23(6): 1-9. (in Chinese) | |
| [6] | 赵祥模国家重点研发计划团队. 自动驾驶测试与评价技术研究进展[J]. 交通运输工程学报, 2023, 23(6): 10-77. |
| ZHAO Xiangmo’s team supported by the National Key Research and Development Program of China (2021YFB2501200). Research progress in testing and evaluation technologies for autonomous driving[J]. J Traf Transport Eng, 2023, 23(6): 10-77. (in Chinese) | |
| [7] | 孙剑, 黄䶮, 田野, 等. 自动驾驶测试公共服务平台构建技术及应用[J]. 中国公路学报, 2024, 37(8): 248-258. |
| SUN Jian, HUANG Yan, TIAN Ye, et al. Development and Application of a Public Service Platform for Autonomous Driving Testing[J]. China J Highw Transport, 2024, 37(8): 248-258. (in Chinese) | |
| [8] | 熊璐, 吴建峰, 冯天悦, 等. 面向自动驾驶逻辑场景评价的危险域识别方法[J]. 中国公路学报, 2024, 37(5): 371-382. |
| XIONG Lu, WU Jianfeng, FENG Tianyue, et al. Danger field identification method for evaluation of autonomous driving logic scenarios[J]. China J Highw Transport, 2024, 37(5): 371-382. (in Chinese) | |
| [9] | 赵树廉, 来飞, 李克强, 等. 基于数字孪生技术的智能汽车测试方法研究[J]. 汽车工程, 2023, 45(1): 42-51. |
| ZHAO Shulian, LAI Fei, LI Keqiang, et al. Research on intelligent vehicle test method based on digital twin technology[J]. Autom Engineering, 2023, 45(1): 42-51. (in Chinese) | |
| [10] | 赵锦涛, 李亮, 薛仲瑾, 等. 基于混合A星的停车场内巡航分层运动规划方法[J]. 机械工程学报, 2023, 59(24): 290-298. |
| ZHAO Jintao, LI Liang, XUE Zhongjin, et al. Hierarchical motion planning method based on hybrid A-star for cruising in parking area[J]. J Mech Engi, 2023, 59(24): 290-298. (in Chinese) | |
| [11] | 修国涛, 谢辉, 宋康, 等. 基于驾驶员经验的无人驾驶车辆平行泊车操作模型[J]. 汽车安全与节能学报, 2023, 14(2): 191-201. |
| XIU Guotao, XIE Hui, SONG Kang, et al. Parallel parking operation model for driverless vehicles based on driver experiences[J]. J Autom Safe Energ, 2023, 14(2): 191-201. (in Chinese) | |
| [12] | Kneissl M, Madhusudhanan A K, Molin A, et al. A multi-vehicle control framework with application to automated valet parking[J]. IEEE Trans Intel Transport Syst, 2021, 22(9): 5697-5707. |
| [13] | ZHANG Jiawei, LI Zhiheng, LI Li, et al. A bi-level cooperative operation approach for AGV based automated valet parking[J]. Transport Res Part C: Emerg Tech, 2021, 128: 103140. |
| [14] | HUANG Jiang, YANG Yifan, DING Dailin, et al. Automatic parking paths planning research based on scattering points six-degree polynomial and easement curve[J]. Proc Inst of Mech Engi, Part D: J Autom Engi, 2023, 237(2-3): 529-543. |
| [15] | 王元民, 王亚飞, 秦文刚, 等. 基于SMPA的半挂车自动泊车运动规划方法研究[J]. 汽车工程, 2024, 46(4): 691-702. |
| WANG Yuanmin, WANG Yafei, QIN Wengang, et al. Study on automatic parking motion planning method for tractor-semitrailer based on SMPA[J]. Autom Engineering, 2024, 46(4): 691-702. (in Chinese) | |
| [16] | 王永胜, 罗禹贡, 黄晨, 等. 基于拓扑地图的自主泊车路径协调与优化策略[J]. 中国公路学报, 2021, 34(1): 177-187. |
| WANG Yongsheng, LUO Yugong, HUANG Chen, et al. A topological map-based path coordination and optimization strategy for autonomous parking[J]. China J Highw Transport, 2021, 34(1): 177-187. (in Chinese) | |
| [17] | 任秉韬, 王淅淅, 邓伟文, 等. 基于混合A*和可变半径RS曲线的自动泊车路径优化方法[J]. 中国公路学报, 2022, 35(7): 317-327. |
| REN Bingtao, WANG Xixi, DENG Weiwen, et al. Path optimization algorithm for automatic parking based on hybrid A* and Reeds-Shepp curve with variable radius[J]. China J Highw Transport, 2022, 35(7): 317-327. (in Chinese) | |
| [18] | 陈晓明, 李柏, 范丽丽, 等. 基于半空间约束理论的自动泊车高性能轨迹优化方法[J]. 机械工程学报, 2024, 60(10): 273-288. |
| CHEN Xiaoming, LI Bai, FAN Lili, et al. High-performance trajectory optimization for automated parking via half-space constraining theory[J]. J Mech Engi, 2024, 60(10): 273-288. (in Chinese) | |
| [19] | 马天飞, 李波, 朱冰, 等. 考虑大气条件影响的自动泊车系统超声波雷达建模[J]. 汽车工程, 2023, 45(9): 1646-1654. |
| MA Tianfei, LI Bo, ZHU Bing, et al. Ultrasonic radar modeling of automatic parking system considering atmospheric conditions effect[J]. Autom Engineering, 2023, 45(9): 1646-1654. (in Chinese) | |
| [20] | 田杰, 叶青. 自动泊车发展现状及运动规划研究进展[J]. 科学技术与工程, 2024, 24(21): 8825-8836. |
| TIAN Jie,YE Qing. Review of automatic parking and research progress of motion planning[J]. Sci Tech Engi, 2024, 24(21): 8825-8836. (in Chinese) | |
| [21] | 丁飞, 张楠, 李升波, 等. 智能网联车路云协同系统架构与关键技术研究综述[J]. 自动化学报, 2022, 48(12): 2863-2885. |
| DING Fei, ZHANG Nan, LI Shengbo, et al. A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system[J]. Acta Auto Sinica, 2022, 48(12): 2863-2885. (in Chinese) | |
| [22] | 王文佳, 侯忠生. 基于无模型自适应控制的自动泊车方案[J]. 控制与决策, 2022, 37(8): 2056-2066. |
| WANG Wenjia, HOU Zhongsheng. Model-free adaptive control based automatic parking scheme[J]. Contr Dec, 2022, 37(8): 2056-2066. (in Chinese) | |
| [23] | Dosovitskiy A, Ros G, Codevilla F, et al. CARLA: An open urban driving simulator[C]// Proc Annua Conf Robot Learn. PMLR, 2017, 78: 1-16. |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 薛清元, 瞿珏, 王崴, 牛天林, 李幸. 基于信任理论的自动驾驶接管场景下HMI设计方法[J]. 汽车安全与节能学报, 2026, 17(2): 270-277. |
| [3] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [4] | 马腾, 马育林, 李祎承, 潘家保, 许述财. 面向自动驾驶功能通用检测的安全行车量化评价[J]. 汽车安全与节能学报, 2026, 17(1): 59-69. |
| [5] | 吴杭哲, 焦一洲, 刘洋, 钟薇, 王水河, 郭景华, 赵健. 自动驾驶车辆紧急避撞线性时变模型预测轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(6): 934-944. |
| [6] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [7] | 潘玉恒, 任晨, 鲁维佳, 李洋. 基于双重池化注意力机制和竖直特征融合的DV-PointPillars三维目标检测模型[J]. 汽车安全与节能学报, 2025, 16(5): 793-801. |
| [8] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [9] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [10] | 李国法, 欧阳德霖, 陈晨, 聂冰冰, 张伟, 禹慧丽, 刘斌, 张强, 王文军, 成波, 李升波. 驾驶风险监测与干预技术研究综述[J]. 汽车安全与节能学报, 2025, 16(2): 181-196. |
| [11] | 胡志龙, 裴晓飞, 周洪龙, 魏炜冉. 基于风险敏感的自动驾驶汽车分层强化学习决策[J]. 汽车安全与节能学报, 2025, 16(2): 326-333. |
| [12] | 杨澜, 赵祥模, 王润民, 王振, 房山, 瞿广跃. 自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1): 1-15. |
| [13] | 李怡, 刘显贵, 唐耀红, 陈立沛, 陈洋睿, 游铭娴. 变曲率道路下自动驾驶小客车安全稳定跟踪控制策略[J]. 汽车安全与节能学报, 2025, 16(1): 136-147. |
| [14] | 刘擎超, 王瑞海, 蔡英凤, 王海, 陈龙. 基于CatBoost和SHAP的高级别自动驾驶车辆非预期停车冲突风险预测[J]. 汽车安全与节能学报, 2025, 16(1): 170-180. |
| [15] | 曹莉凌, 刘君丽, 金升烨, 曹守启, 周国峰. 面向自动驾驶的远程多维信息实时交互系统设计[J]. 汽车安全与节能学报, 2024, 15(6): 934-942. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||