欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (6): 934-942.DOI: 10.3969/j.issn.1674-8484.2024.06.015
曹莉凌( ), 刘君丽, 金升烨, 曹守启, 周国峰*()
), 刘君丽, 金升烨, 曹守启, 周国峰*()
收稿日期:2024-03-09
修回日期:2024-05-07
出版日期:2024-12-31
发布日期:2025-01-01
通讯作者:
*周国峰,讲师。E-mail:gfzhou@shou.edu.cn。
作者简介:曹莉凌(1982—),女(汉),湖南,高级工程师。E-mail:llcao@shou.edu.cn。
基金资助:
CAO Liling(), LIU Junli, JIN Shengye, CAO Shouqi, ZHOU Guofeng*()
Received:2024-03-09
Revised:2024-05-07
Online:2024-12-31
Published:2025-01-01
摘要:
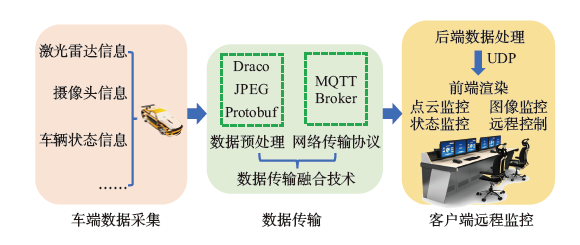
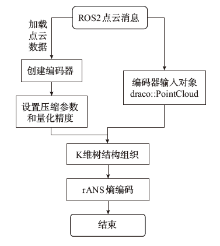
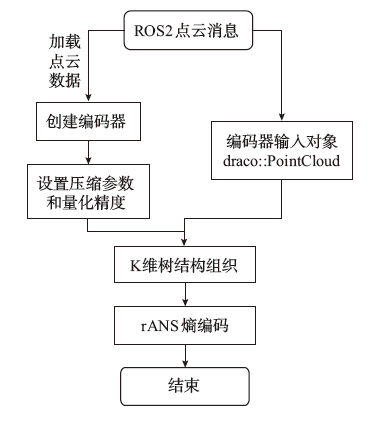
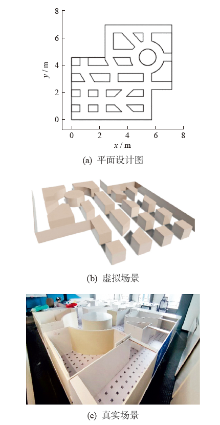
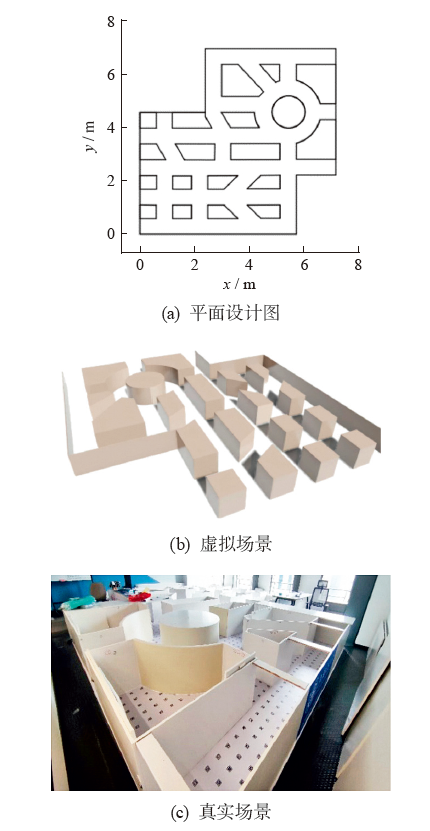
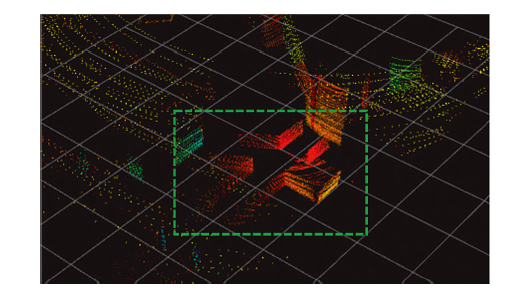
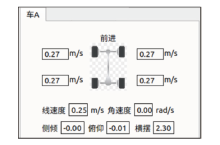
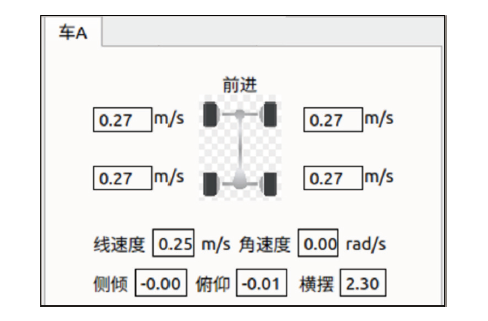
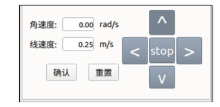
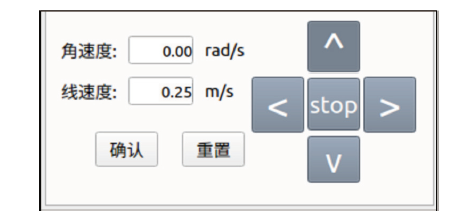
为了提高低速、半封闭场景下自动驾驶车辆的安全性和运行效率,该文设计了一个基于第2代机器人操作系统(ROS2)框架的客户端/服务器(C/S)模式远程多维信息实时交互系统。采用数据传输融合技术,即配合多种数据预处理算法和统一的网络传输协议,实现了图像、点云和车辆状态信息的高效传输和实时交互。结果表明:在优良网络条件下,该系统的平均延时低于0.063 s,接收频率与发送频率几乎相等,丢包率不超过3.5%;集成的远程控制模块确保了操作的精确性; 在长时间稳定运行下系统的性能仍保持2.7%的中央处理器(CPU)低占用率,体现了出色的资源效率。该系统在确保实时性、可靠性和低资源消耗方面显示出有效性,可为自动驾驶领域的信息交互提供有力支持。
中图分类号:
曹莉凌, 刘君丽, 金升烨, 曹守启, 周国峰. 面向自动驾驶的远程多维信息实时交互系统设计[J]. 汽车安全与节能学报, 2024, 15(6): 934-942.
CAO Liling, LIU Junli, JIN Shengye, CAO Shouqi, ZHOU Guofeng. Design of a remote multidimensional information real time interaction system for autonomous driving[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 934-942.
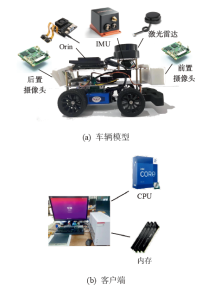
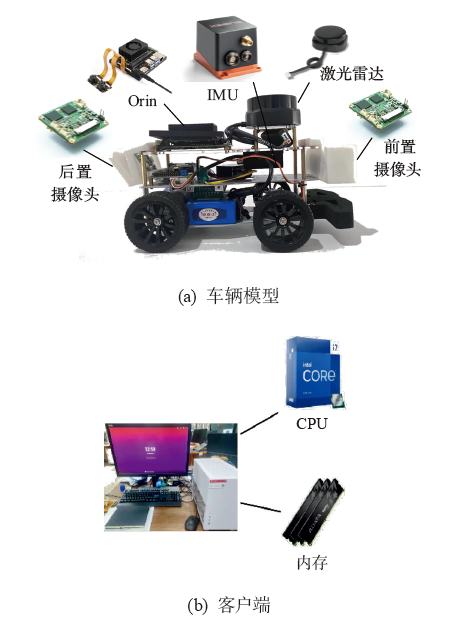
| 硬件环境 | |
|---|---|
| 车端计算机 | NVIDIA Orin |
| 车载摄像头 | IMX307 |
| 车载激光雷达 | Livox |
| 车载IMU | Xsens 680G |
| 客户端内存 | 64G |
| 客户端CPU型号 | i7-13700KF |
| 软件环境 | |
| 编程语言 | C++ |
| 机器人操作系统 | ROS-humble |
| 交互界面可视化库QT | 5.12 |
| 点云可视化的vtk库和pcl库 | 8.2.0、1.10 |
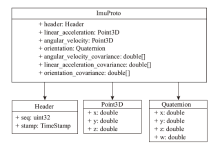
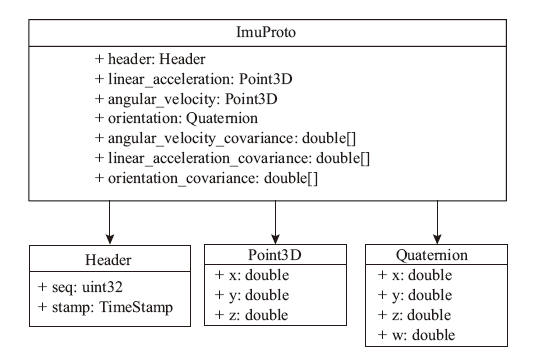
| Protobuf | 3.20.3 |
| MQTT | paho-MQTT |
| 车端操作系统 | Ubuntu20.04 |
| 客户端操作系统 | Ubuntu20.04 |
| 硬件环境 | |
|---|---|
| 车端计算机 | NVIDIA Orin |
| 车载摄像头 | IMX307 |
| 车载激光雷达 | Livox |
| 车载IMU | Xsens 680G |
| 客户端内存 | 64G |
| 客户端CPU型号 | i7-13700KF |
| 软件环境 | |
| 编程语言 | C++ |
| 机器人操作系统 | ROS-humble |
| 交互界面可视化库QT | 5.12 |
| 点云可视化的vtk库和pcl库 | 8.2.0、1.10 |
| Protobuf | 3.20.3 |
| MQTT | paho-MQTT |
| 车端操作系统 | Ubuntu20.04 |
| 客户端操作系统 | Ubuntu20.04 |

| 图像延时 s | 图像频率 Hz | 图像丢包 % | 点云延时 s | 点云频率 Hz | 点云丢包 % | 状态数据 延时/ s | 状态数据 频率/ Hz | 状态数据 丢包/ % | |
|---|---|---|---|---|---|---|---|---|---|
| 本文系统 | 0.039 | 30 | 3.3 | 0.035 | 10 | 2.4 | 0.031 | 100 | 0.2 |
| 文献[16] | 0.348 | 21 | 1.053 | - | 10 | 3.47 | - | 10 | 0.42 |
| 文献[23] | 0.63 | - | - | - | - | - | 0.08 | - | - |
| 文献[24] | 0.25 | 4 | 0.063 | - | - | - | - | - | - |
| 图像延时 s | 图像频率 Hz | 图像丢包 % | 点云延时 s | 点云频率 Hz | 点云丢包 % | 状态数据 延时/ s | 状态数据 频率/ Hz | 状态数据 丢包/ % | |
|---|---|---|---|---|---|---|---|---|---|
| 本文系统 | 0.039 | 30 | 3.3 | 0.035 | 10 | 2.4 | 0.031 | 100 | 0.2 |
| 文献[16] | 0.348 | 21 | 1.053 | - | 10 | 3.47 | - | 10 | 0.42 |
| 文献[23] | 0.63 | - | - | - | - | - | 0.08 | - | - |
| 文献[24] | 0.25 | 4 | 0.063 | - | - | - | - | - | - |
| [1] | 肖献法. 国务院安委办召开贯彻落实《“十四五”全国道路交通安全规划》视频会议,推动规划落地见效[J]. 商用汽车, 2022(9): 5-5. |
| XIAO Xianfa. The Office of the Safety Committee of the State Council held a video conference on the implementation of “The Fourteenth Five Year' National Road Traffic Safety Plan” to promote the implementation of the plan[J]. Commer Vehi, 2022(9): 5-5. (in Chinese) | |
| [2] | 崔智明. 中汽协专家解读2023版智能网联汽车《指南》[J]. 汽车纵横, 2023(9): 29-32. |
| CUI Zhiming. Interpretation of the 2023 edition of the intelligent connected vehicle construction Guidelines by experts from the CAAM[J]. Autom Rev, 2023(9): 29-32. (in Chinese) | |
| [3] | 李晓华. 自动驾驶的发展现状、挑战与应对[J]. 人民论坛, 2023(18): 68-72. |
| LI Xiaohua. The development status, challenges and countermeasures of autonomous driving[J]. People's Tribune, 2023(18): 68-72. (in Chinese) | |
| [4] | 智能网联汽车编辑部. 2023新能源智能网联汽车十大事件发布[J]. 智能网联汽车, 2024(1): 40-45. |
| Anonymous. Top 10 events of 2023 new energy intelligent connected vehicles released[J]. Intel Connect Vehi, 2024(1): 40-45. (in Chinese) | |
| [5] | 张焱杰, 黄炜, 刘信陶, 等. 自动驾驶高精地图信息交互方法[J]. 武汉大学学报(信息科学版), 2024, 49(4): 662-671. |
| ZHANG Yanjie, HUANG Wei, LIU Xintao, et al. An approach for high definition (HD) maps information interaction forautonomous driving[J]. Geomat Info Sci Wuhan Univ, 2024, 49(4): 662-671. (in Chinese) | |
| [6] | GUO Chunshi, Sentouh C, Haué J B, et al. Driver-vehicle cooperation: A hierarchical cooperative control architecture for automated driving systems[J]. Cogn Tech Work, 2019, 21: 657-670. |
| [7] | SHI Zhuqing, CHEN Hong, QU Ting, et al. Human-machine cooperative steering control considering mitigating human-machine conflict based on driver trust[J]. IEEE Trans Human-Mach Syst, 2022, 52(5): 1036-1048. |
| [8] | 李洋, 杨智元, 陈晓龙, 等. 智能汽车人机协同决策关键技术综述[J]. 中国公路学报, 2024, 37(3): 98-116. |
| LI Yang, YANG Zhiyuan, CHEN Xiaolong, et al. A survey on the human-machine collaborative decision making in intelligent vehicles[J]. Chin J Highw Transport, 2024, 37(3): 98-116. (in Chinese) | |
| [9] | 刘志鹏, 冀建宇, 马凌峰. C-V2X的大规模测试方法与性能分析[J]. 质量与认证, 2022(7): 51-53. |
| LIU Zhipeng, JI Jianyu, MA Lingfeng. Research and performance analysis of C-V2X test method in large scalescenarios[J]. Chin Qual Certificat, 2022(7): 51-53. (in Chinese) | |
| [10] | 郑春鹏. 面向远程驾驶的智能信息交互系统设计与实现[D]. 郑州: 郑州大学, 2021. |
| ZHENG Chunpeng. Design and implementation of intelligent information interaction system for remote driving[D]. Zhengzhou: Zhengzhou University, 2021. (in Chinese) | |
| [11] | 王锐松, 吴晓东. 基于回旋曲线的远程驾驶轨迹预测法[J]. 传感器与微系统, 2023, 42(11): 127-130. |
| WANG Ruisong, WU Xiaodong. Remote driving trajectory prediction method based on clothoid[J]. Transdu Microsyst Tech, 2023, 42(11): 127-130. (in Chinese) | |
| [12] | Doumanoglou A, Drakoulis P, Zioulis N, et al. Benchmarking open-source static 3D mesh codecs for immersive media interactive live streaming[J]. IEEE J Emerg Select Top Circuit Syst, 2019, 9(1): 190-203. |
| [13] | 张卉冉, 董震, 杨必胜, 等. 点云压缩研究进展与趋势[J]. 武汉大学学报(信息科学版), 2023, 48(2): 192-205. |
| ZHANG Huiran, DONG Zhen, Yang Bisheng, et al. Progress and perspectives of point cloud compression[J]. Geomat Info Sci Wuhan Univ, 2023, 48(2): 192-205. (in Chinese) | |
| [14] | 吴真其. 面向车联网的车辆监控与分析平台的设计与实现[D]. 昆明: 西南大学, 2021. |
| WU Zhenqi. Design and implementation of a vehicle monitoring and analysis platform for the internet of vehicles[D]. Kunming: Southwest University, 2021. (in Chinese) | |
| [15] |
刘永奎, 张霖, 刘迎福, 等. 云制造环境下工业机器人远程监控系统设计与实现[J]. 系统仿真学报, 2023, 35(2): 318-329.
doi: 10.16182/j.issn1004731x.joss.21-1015 |
|
LIU Yongkui, ZHANG Lin, LIU Yingfu, et al. Design and implementation of industrial robot remote monitoring system in cloud manufacturing[J]. J Syst Simul, 2023, 35(2): 318-329. (in Chinese)
doi: 10.16182/j.issn1004731x.joss.21-1015 |
|
| [16] | 潘宇. 面向巡检机器人的远程运行管理及决策规划系统设计[D]. 杭州: 浙江大学, 2022. |
| PAN Yu. Design of remote operation management and decision-making planning system for inspection robots[D]. Hangzhou: Zhejiang University, 2022. (in Chinese) | |
| [17] | 姜梦炜, 李明臻, 吴盼盼. 基于C/S架构的高速公路清扫车远程监控系统设计[J]. 机电信息, 2023(2): 25-27. |
| JIANG Meiwei, LI Mingzhen, WU Panpan. Design of remote monitoring system for highway cleaning vehicles based on C/S architecture[J]. Mech Elect Info, 2023(2): 25-27. (in Chinese) | |
| [18] | 关东, 党立波. 管道安全综合预警平台设计及实现[J]. 地理空间信息, 2023, 21(10): 100-103. |
| GUAN Dong, DANG Libo. Design and lmplementation of pipeline safety comprehensive early warning platform[J]. Geospat Info, 2023, 21(10): 100-103. (in Chinese) | |
| [19] | 赵亮, 陈昌鑫, 王丽君. 容栅传感与物联组网的城市隧道内涝监测预警系统设计[J]. 传感技术学报, 2023, 36(12): 1981-1987. |
| ZHAO Liang, CHEN Changxin, WANG Lijun, et al. Design of urban tunnel waterlogging monitoring and early warning system based on capacitive grid sensing and the internet of things[J]. Chin J Sens Actuat, 2023, 36(12): 1981-1987. (in Chinese) | |
| [20] | 王宏伟, 温昌凯, 刘孟楠, 等. 拖拉机作业工况参数检测系统研究[J]. 农业机械学报, 2023, 54(S2): 409-416. |
| WANG Hongwei, WEN Changkai, LIU Mengnan, et al. Tractor operating condition parameter testing system[J]. Trans Chin Soc Agricul Mach, 2023, 54(S2): 409-416. (in Chinese) | |
| [21] | 谢章伟, 张兴波, 徐哲, 等. 基于数字孪生的激光加工零件表面温度监控系统的构建[J]. 工程设计学报, 2023, 30(4): 409-418. |
| XIE Zhangwei, ZHANG Xingbo, XU Zhe, et al. Construction of surface temperature monitoring system for laser machining parts based on digital twin[J]. Chin J Engi Desig, 2023, 30(4): 409-418. (in Chinese) | |
| [22] | 朱俊辉. 基于机器视觉的无人机跟踪系统研究[D]. 长春: 吉林大学, 2020. |
| ZHU Junhui. Research on UAV tracking system based on machine vision[D]. Changchun: Jilin University, 2020. (in Chinese) | |
| [23] | 张宇宏. 巡检机器人管理系统的架构设计和在线故障诊断研究[D]. 哈尔滨: 哈尔滨工程大学, 2023. |
| ZHANG Yuhong. Architecture design of inspection robot management system and online fault diagnosis method[D]. Harbin:Harbin Engineering University, 2023. (in Chinese) | |
| [24] | Emmi L, Fernández R, Gonzalez-de-Santos P, et al. Exploiting the internet resources for autonomous robots in agriculture[J]. Agriculture. 2023, 13(5): 1005-1026. |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 薛清元, 瞿珏, 王崴, 牛天林, 李幸. 基于信任理论的自动驾驶接管场景下HMI设计方法[J]. 汽车安全与节能学报, 2026, 17(2): 270-277. |
| [3] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [4] | 马腾, 马育林, 李祎承, 潘家保, 许述财. 面向自动驾驶功能通用检测的安全行车量化评价[J]. 汽车安全与节能学报, 2026, 17(1): 59-69. |
| [5] | 吴杭哲, 焦一洲, 刘洋, 钟薇, 王水河, 郭景华, 赵健. 自动驾驶车辆紧急避撞线性时变模型预测轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(6): 934-944. |
| [6] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [7] | 潘玉恒, 任晨, 鲁维佳, 李洋. 基于双重池化注意力机制和竖直特征融合的DV-PointPillars三维目标检测模型[J]. 汽车安全与节能学报, 2025, 16(5): 793-801. |
| [8] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [9] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [10] | 李国法, 欧阳德霖, 陈晨, 聂冰冰, 张伟, 禹慧丽, 刘斌, 张强, 王文军, 成波, 李升波. 驾驶风险监测与干预技术研究综述[J]. 汽车安全与节能学报, 2025, 16(2): 181-196. |
| [11] | 胡志龙, 裴晓飞, 周洪龙, 魏炜冉. 基于风险敏感的自动驾驶汽车分层强化学习决策[J]. 汽车安全与节能学报, 2025, 16(2): 326-333. |
| [12] | 杨俊儒, 郑四发, 许述财, 田野, 孙剑, 孙川, 李浩然. 基于OnSite平台的自动泊车测评工具的研究与设计[J]. 汽车安全与节能学报, 2025, 16(2): 334-343. |
| [13] | 杨澜, 赵祥模, 王润民, 王振, 房山, 瞿广跃. 自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1): 1-15. |
| [14] | 李怡, 刘显贵, 唐耀红, 陈立沛, 陈洋睿, 游铭娴. 变曲率道路下自动驾驶小客车安全稳定跟踪控制策略[J]. 汽车安全与节能学报, 2025, 16(1): 136-147. |
| [15] | 刘擎超, 王瑞海, 蔡英凤, 王海, 陈龙. 基于CatBoost和SHAP的高级别自动驾驶车辆非预期停车冲突风险预测[J]. 汽车安全与节能学报, 2025, 16(1): 170-180. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||