欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (6): 830-838.DOI: 10.3969/j.issn.1674-8484.2024.06.004
狄亚格1( ), 周健1, 陆杰1, 秦嘉2, 魏妤沁2, 王淙进1, 郝朝阳1, 缪雪龙1
), 周健1, 陆杰1, 秦嘉2, 魏妤沁2, 王淙进1, 郝朝阳1, 缪雪龙1
收稿日期:2024-02-14
修回日期:2024-04-11
出版日期:2024-12-31
发布日期:2025-01-01
作者简介:狄亚格(1980—),男(汉),河南,副教授。E-mail:01200013@sues.edu.cn。
DI Yage1(), ZHOU Jian1, LU Jie1, QIN Jia2, WEI Yuqin2, WANG Congjin1, HAO Zhaoyang1, MIAO Xuelong1
Received:2024-02-14
Revised:2024-04-11
Online:2024-12-31
Published:2025-01-01
摘要:
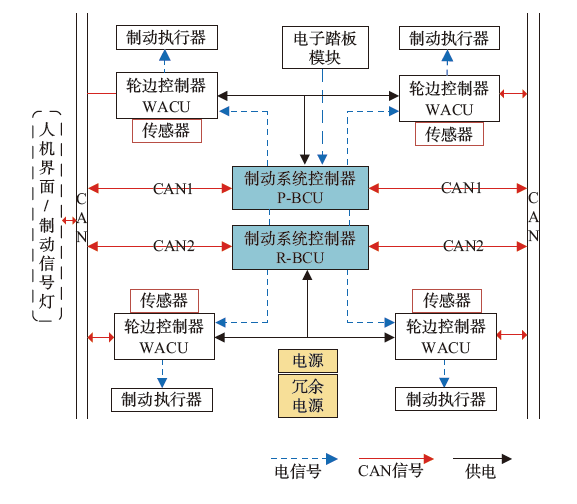
为了提高面向智能车辆的电子机械制动(EMB)系统的安全性与鲁棒性,开展了相应的功能安全概念设计。在ISO 26262标准的基础上,并结合产品开发现状,采用故障注入的仿真方法,获得了车身在EMB失效时的运行规律,为故障发生时危害的严重度和可控性评判提供了数据支撑,有效解决了EMB系统数据库不足的问题,并实现了严重度和可控性的量化分析。开展了危害分析与风险评估(HARA),得到了10个功能安全目标及其对应的汽车安全完整性等级(ASIL),制定了EMB系统的功能安全架构和需求。结果表明:本概念分析方法,可为其它全新智能驾驶电子系统的功能安全开发,提供参考。
中图分类号:
狄亚格, 周健, 陆杰, 秦嘉, 魏妤沁, 王淙进, 郝朝阳, 缪雪龙. 基于整车动力学的EMB线控制动系统功能安全概念设计[J]. 汽车安全与节能学报, 2024, 15(6): 830-838.
DI Yage, ZHOU Jian, LU Jie, QIN Jia, WEI Yuqin, WANG Congjin, HAO Zhaoyang, MIAO Xuelong. Functional safety concept design for EMB brake-by-wire system based on vehicle dynamic[J]. Journal of Automotive Safety and Energy, 2024, 15(6): 830-838.
| 功能失效分类 | 功能失效模式 | 整车危害 |
|---|---|---|
| 系统无需求时有功能输出 | 运行中,驾驶员没有踩制动踏板但非预期制动 | 车辆非预期减速及车辆失去稳定性 |
| 静止时,驾驶员没有踩制动踏板但非预期制动 | 车辆无法移动 | |
| 系统无需求时有功能输出 | 运行中,驾驶员踩制动踏板但无制动力 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板但无制动力 | 溜车 | |
| 功能输出少于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但低于预期 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 溜车 | |
| 功能输出大于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但高于预期 | 车辆加速度过大 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 符合预期,无危害 |
| 功能失效分类 | 功能失效模式 | 整车危害 |
|---|---|---|
| 系统无需求时有功能输出 | 运行中,驾驶员没有踩制动踏板但非预期制动 | 车辆非预期减速及车辆失去稳定性 |
| 静止时,驾驶员没有踩制动踏板但非预期制动 | 车辆无法移动 | |
| 系统无需求时有功能输出 | 运行中,驾驶员踩制动踏板但无制动力 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板但无制动力 | 溜车 | |
| 功能输出少于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但低于预期 | 车辆减速度过小 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 溜车 | |
| 功能输出大于系统需求 | 运行中,驾驶员踩制动踏板,有制动力但高于预期 | 车辆加速度过大 |
| 静止时,驾驶员踩制动踏板,有制动力但低于预期 | 符合预期,无危害 |
| 严重度 S | 暴露率 E | 可控性C | |||
|---|---|---|---|---|---|
| C0 | C1 | C2 | C3 | ||
| S0 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | QM | |
| E4 | QM | QM | QM | A | |
| S1 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | A | |
| E4 | QM | QM | A | B | |
| S2 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | A | |
| E3 | QM | QM | A | B | |
| E4 | QM | A | B | C | |
| S3 | E1 | QM | QM | QM | A |
| E2 | QM | QM | A | B | |
| E3 | QM | A | B | C | |
| E4 | A | B | C | D | |
| 严重度 S | 暴露率 E | 可控性C | |||
|---|---|---|---|---|---|
| C0 | C1 | C2 | C3 | ||
| S0 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | QM | |
| E4 | QM | QM | QM | A | |
| S1 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | QM | |
| E3 | QM | QM | QM | A | |
| E4 | QM | QM | A | B | |
| S2 | E1 | QM | QM | QM | QM |
| E2 | QM | QM | QM | A | |
| E3 | QM | QM | A | B | |
| E4 | QM | A | B | C | |
| S3 | E1 | QM | QM | QM | A |
| E2 | QM | QM | A | B | |
| E3 | QM | A | B | C | |
| E4 | A | B | C | D | |

| 序号 | 场景 | 危害事件 |
|---|---|---|
| 1 | 平路直道跟车 | 整车制动力丢失与前车追尾 |
| 2 | 平路直道跟车 | 整车发生非预期制动与后车追尾 |
| 3 | 路口减速停车 | 整车制动力丢失与行人相撞 |
| 4 | 弯道转弯 | 整车制动力丢失与道路两侧相撞 |
| 5 | 弯道转弯 | 整车发生非预期制动,车辆碰撞 |
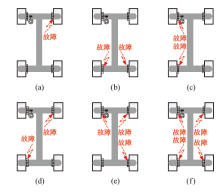
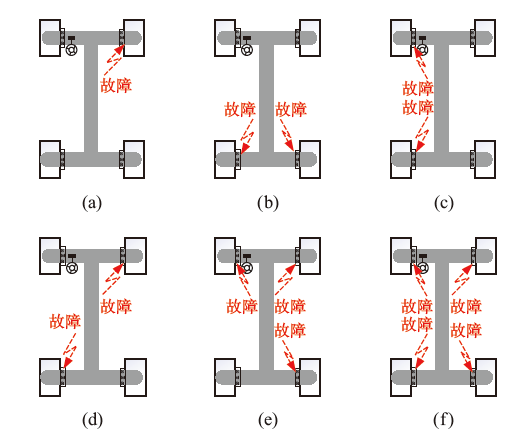
| 6 | 直道直行 | 单轮/多轮制动力丢失,车辆碰撞 |
| 7 | 直道直行 | 单轮/多轮非预期制动,车辆碰撞 |
| 8 | 弯道转弯 | 单轮/多轮制动力丢失,车辆碰撞 |
| 9 | 弯道转弯 | 单轮/多轮非预期制动,车辆碰撞 |
| 序号 | 场景 | 危害事件 |
|---|---|---|
| 1 | 平路直道跟车 | 整车制动力丢失与前车追尾 |
| 2 | 平路直道跟车 | 整车发生非预期制动与后车追尾 |
| 3 | 路口减速停车 | 整车制动力丢失与行人相撞 |
| 4 | 弯道转弯 | 整车制动力丢失与道路两侧相撞 |
| 5 | 弯道转弯 | 整车发生非预期制动,车辆碰撞 |
| 6 | 直道直行 | 单轮/多轮制动力丢失,车辆碰撞 |
| 7 | 直道直行 | 单轮/多轮非预期制动,车辆碰撞 |
| 8 | 弯道转弯 | 单轮/多轮制动力丢失,车辆碰撞 |
| 9 | 弯道转弯 | 单轮/多轮非预期制动,车辆碰撞 |
| 序号 | 功能安全目标(Safety Goal) | ASIL |
|---|---|---|
| SG01 | 避免制动踏板制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆整体制动失效 | D |
| SG04 | 避免车辆整体突发制动 | D |
| SG05 | 避免车辆整体制动过度 | C |
| SG06 | 避免车辆整体制动不足 | C |
| SG07 | 避免单个或多个车轮制动失效 | D |
| SG08 | 避免单个或多个车轮突发制动 | D |
| SG09 | 避免单个或多个车轮制动过度 | D |
| SG10 | 避免单个或多个车轮制动不足 | D |
| 序号 | 功能安全目标(Safety Goal) | ASIL |
|---|---|---|
| SG01 | 避免制动踏板制动请求丢失 | D |
| SG02 | 避免外部制动请求丢失 | D |
| SG03 | 避免车辆整体制动失效 | D |
| SG04 | 避免车辆整体突发制动 | D |
| SG05 | 避免车辆整体制动过度 | C |
| SG06 | 避免车辆整体制动不足 | C |
| SG07 | 避免单个或多个车轮制动失效 | D |
| SG08 | 避免单个或多个车轮突发制动 | D |
| SG09 | 避免单个或多个车轮制动过度 | D |
| SG10 | 避免单个或多个车轮制动不足 | D |
| ASIL等级 | 分解规则 |
|---|---|
| ASILD | ASIL C(D) + ASIL A(D) |
| ASIL B(D) + ASIL B(D) | |
| ASIL D(D) + QM(D) | |
| ASIL C | ASIL B(C) + ASIL A(C) |
| ASIL C(C) + QM | |
| ASIL B | ASIL A(B) + ASIL A(B) |
| ASIL B(B) + QM(B) | |
| ASIL A | ASIL A(A) + QM(A) |
| ASIL等级 | 分解规则 |
|---|---|
| ASILD | ASIL C(D) + ASIL A(D) |
| ASIL B(D) + ASIL B(D) | |
| ASIL D(D) + QM(D) | |
| ASIL C | ASIL B(C) + ASIL A(C) |
| ASIL C(C) + QM | |
| ASIL B | ASIL A(B) + ASIL A(B) |
| ASIL B(B) + QM(B) | |
| ASIL A | ASIL A(A) + QM(A) |
| FSR | 需求定义 | ASIL |
|---|---|---|
| FSR1 | BCU正确接收信号,并正确处理和发送控制信号 | D |
| FSR1.1 | 正确制动逻辑仲裁 | D |
| FSR1.2 | 信号综合处理,进行正确力矩计算及四轮制动力矩分配 | B(D) |
| FSR1.3 | 控制信号正确发送 | B(D) |
| FSR1.4 | 应用诊断与安全机制进行校验 | D(D) |
| FSR2 | 获取轮边实际制动力 | B(D) |
| FSR2.1 | 四轮力传感器电路采集准确的制动力信号 | QM(D) |
| FSR2.2 | BCU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.3 | WACU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.4 | 应用诊断与安全机制进行校验 | B(D) |
| … | … | … |
| FSR6 | 正常供电 | D |
| FSR6.1 | 电源正常工作 | B(D) |
| FSR6.2 | 冗余电源在主电源异常时正常工作 | B(D) |
| FSR6.3 | 调压电路正常工作 | B(D) |
| FSR6.4 | 应用安全诊断及校验机制 | D(D) |
| … | … | … |
| FSR | 需求定义 | ASIL |
|---|---|---|
| FSR1 | BCU正确接收信号,并正确处理和发送控制信号 | D |
| FSR1.1 | 正确制动逻辑仲裁 | D |
| FSR1.2 | 信号综合处理,进行正确力矩计算及四轮制动力矩分配 | B(D) |
| FSR1.3 | 控制信号正确发送 | B(D) |
| FSR1.4 | 应用诊断与安全机制进行校验 | D(D) |
| FSR2 | 获取轮边实际制动力 | B(D) |
| FSR2.1 | 四轮力传感器电路采集准确的制动力信号 | QM(D) |
| FSR2.2 | BCU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.3 | WACU传感器信号处理电路正确接收制动力信号 | QM(D) |
| FSR2.4 | 应用诊断与安全机制进行校验 | B(D) |
| … | … | … |
| FSR6 | 正常供电 | D |
| FSR6.1 | 电源正常工作 | B(D) |
| FSR6.2 | 冗余电源在主电源异常时正常工作 | B(D) |
| FSR6.3 | 调压电路正常工作 | B(D) |
| FSR6.4 | 应用安全诊断及校验机制 | D(D) |
| … | … | … |
| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14. (in Chinese) | |
| [2] | 尘帅, 王吉忠, 张西龙. 线控制动系统车辆制动与横摆稳定性协调控制[J]. 济南大学学报(自然科学版), 2020, 34(4): 371-6, 83. |
| CHEN Shuai, WANG Jizhong, ZHANG Xilong. Coordinated control of braking and yaw stability for vehicle equipped with brake-by-wire system[J]. J Univ of Jinan (Nat Sci Ed), 2020, 34(4): 371-6, 83. (in Chinese) | |
| [3] | 李亮, 王翔宇, 程硕, 等. 汽车底盘线控与动力学域控制技术[J]. 汽车安全与节能学报, 2020, 11(2): 143-60. |
| LI Liang, WANG Xiangyu, CHEN Shuo, et al. Technologies of control-by-wire and dynamic domain control for automotive chassis[J]. J Autom Safe Energ, 2020, 11(2): 143-60. (in Chinese) | |
| [4] | International Organization for Standardization (ISO).ISO 26262: 2018 Road vehicles-functional safety [S]. International Organization for Standardization, 2018. |
| [5] | 中国国家标准化管理委员会.道路车辆功能安全: GB/T34590.3—2022 [S]. 北京: 中国标准出版社, 2022. |
| Standardization Administration of the People’s Republic of China.Road vehicles functional safety: GB/T34590.3—2022 [S]. Bejing: China Standards Press, 2022. (in Chinese) | |
| [6] | 杨涛. 面向自动驾驶的车辆线控制动系统功能安全研究[D]. 长春: 吉林大学, 2023. |
| YANG Tao. Research on functional safety of vehicle brake by wire system for automatic driving[D]. Changchun: Jilin University, 2023. (in Chinese) | |
| [7] | Khastgir S, Birrell S, Dhadyalla G, et al. Towards increased reliability by objectification of hazard analysis and risk Assessment (HARA) of automated automotive systems[J]. Saf Sci, 2017, 99: 166-77. |
| [8] | LEU Kuenlong, HUANG Hsiang, CHEN Yungyuan, et al. An intelligent brake-by-wire system design and analysis in accordance with ISO-26262 functional safety standard [C]// 2015 Int'l Conf Connect Vehi Expo (ICCVE), Shenzhen, China, 2015: 150-156. |
| [9] | 王俊明, 周宏伟. 基于ISO26262的车道保持辅助的功能安全概念设计[J]. 重庆交通大学学报(自然科学版), 2019, 38(3): 135-142. |
| WANG Junming, ZHOU Hongwei. Functional safety concept design of lane keeping assistance based on ISO26262[J]. J Chongqing Jiaotong Univ (Nat Sci Ed), 2019, 38(3): 135-142. (in Chinese) | |
| [10] | 荣芩, 吴晓东, 许敏. 基于ISO标准的道路车辆线控转向系统的功能安全概念设计[J]. 汽车安全与节能学报, 2018, 9(3): 250-257. |
| RONG Qin, WU Xiaodong, XU Min. Functional safety concept design for steer-by-wire system of road vehicle based on the ISO[J]. J Autom Safe Energ, 2018, 9(3): 250-257. (in Chinese) | |
| [11] | 程洁, 郑凯, 秦嘉, 等. 面向智能车辆的EMB系统功能安全分析及应用设计[J]. 汽车安全与节能学报, 2023, 14(1): 69-79. |
| CHENG Jie, ZHENG Kai, QIN Jia, et al. Functional safety analysis and application design of EMB system for intelligent vehicles[J]. J Autom Safe Energ, 2023, 14(1): 69-79. (in Chinese) | |
| [12] | Juez G, Amparan E, Lattarulo R, et al. Safety assessment of automated vehicle functions by simulation-based fault injection [C]// 2017 IEEE Int'l Conf Vehi Elect Saf (ICVES), Vienna, Austria, 2017: 214-219. |
| [13] | Baybutt P. A critique of the hazard and operability (HAZOP) study[J]. J Loss Prev Process Ind, 2015, 33: 52-8. |
| [14] | SAE Int'l. Considerations for ISO 26262 ASIL hazard classification:SAE J2980: 2018 [S/OL]. [2023-12-25]. https://www.antpedia.com/standard/2014272200-1.html. |
| [15] | Verband der Automobilindustrie. Situation catalogue e-parameters according to ISO 26262-3 VDA 702: 2015 [S/OL]. [2023-11-18]. https://www.doc88.com/p-7028438060252.html. |
| [16] | 王喜洋, 李鸿鹏, 奚文霞, 等. 一种基于功能安全的制动系统S和C评级装置及方法: 中国, CN115946709A[P]. 2023-04-11. |
| WANG Xiyang, LI Hongpeng, XI Wenxia, et al. The invention relates to an S and C rating device and a method for a braking system based on functional safety: China. CN115946709A[P]. 2023-04-11. (in Chinese) |
| [1] | 赵剑, 公爵, 范科峰, 刘蓬勃, 李琳辉, 汪想, 徐正, 东泽源, 姚念民. 智能车辆结构-功能-信息强耦合安全与防护技术[J]. 汽车安全与节能学报, 2025, 16(6): 813-831. |
| [2] | 张荣誉, 赵轩, 王姝, 李美莹. 基于鲁棒模型预测的电子机械制动系统夹紧力控制[J]. 汽车安全与节能学报, 2025, 16(6): 832-842. |
| [3] | 石天京, 李旭. 基于动态图自注意力的车流参数预测方法[J]. 汽车安全与节能学报, 2024, 15(5): 680-688. |
| [4] | 王宙, 褚端峰, 高博麟, 梅润, 钟薇. 云支持的分层式车辆队列预测性巡航控制[J]. 汽车安全与节能学报, 2023, 14(5): 591-599. |
| [5] | 张亚勤, 李震宇, 尚国斌, 周谷越, 高果荣, 袁基睿. 面向自动驾驶的车路云一体化框架[J]. 汽车安全与节能学报, 2023, 14(3): 249-273. |
| [6] | 周星, 刘夫云, 唐振天, 邓聚才. 基于轨迹预测最优侧向加速度的驾驶员模型[J]. 汽车安全与节能学报, 2023, 14(3): 338-345. |
| [7] | 程洁, 郑凯, 秦嘉, 吴晓东. 面向智能车辆的EMB系统功能安全分析及应用设计[J]. 汽车安全与节能学报, 2023, 14(1): 69-79. |
| [8] | 杨帅, 张金换, 钱占伟, 崔东. 汽车安全多领域融合的研究与展望[J]. 汽车安全与节能学报, 2022, 13(1): 29-47. |
| [9] | 房亮, 关志伟, 王涛, 龚进峰, 杜峰. 基于深度学习LSTM的智能车辆避撞模型及验证[J]. 汽车安全与节能学报, 2022, 13(1): 104-111. |
| [10] | 胡远志,刘俊生,何佳,肖航,宋佳. 基于激光雷达点云与图像融合的车辆目标检测方法[J]. JASE, 2019, 10(4): 451-458. |
| [11] | 庄鸿杰,刘子建,钟浩龙,刘 瑜. 结合应变能分析的车身刚度链设计方法[J]. JASE, 2019, 10(3): 317-325. |
| [12] | 魏民祥,滕德成. 基于全卷积网络的车道区域分割算法[J]. JASE, 2019, 10(3): 334-341. |
| [13] | 荣 芩,吴晓东,许 敏. 基于ISO 标准的道路车辆线控转向系统的功能安全概念设计[J]. JASE, 2018, 9(3): 250-257. |
| [14] | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 07(02): 151-159. |
| [15] | 王文伟, 姜卫远, 高丰岭, 程雨婷. 基于拓扑优化的电动汽车车身结构概念设计[J]. 汽车安全与节能学报, 2016, 07(02): 182-187. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||