欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (5): 611-633.DOI: 10.3969/j.issn.1674-8484.2024.05.001
• 综述与展望 • 下一篇
刘洋1( ), 占佳豪2, 李深3,*(), 李小鹏4, 陈峻5
), 占佳豪2, 李深3,*(), 李小鹏4, 陈峻5
收稿日期:2024-07-25
修回日期:2024-08-08
出版日期:2024-10-31
发布日期:2024-11-07
通讯作者:
李深,助理研究员。E-mail:作者简介:刘洋(1991—),男(汉),山东,研究助理教授。E-mail:liuy@chalmers.se。基金资助:
LIU Yang1(), ZHAN Jiahao2, LI Shen3,*(), LI Xiaopeng4, CHEN Jun5
Received:2024-07-25
Revised:2024-08-08
Online:2024-10-31
Published:2024-11-07
摘要:
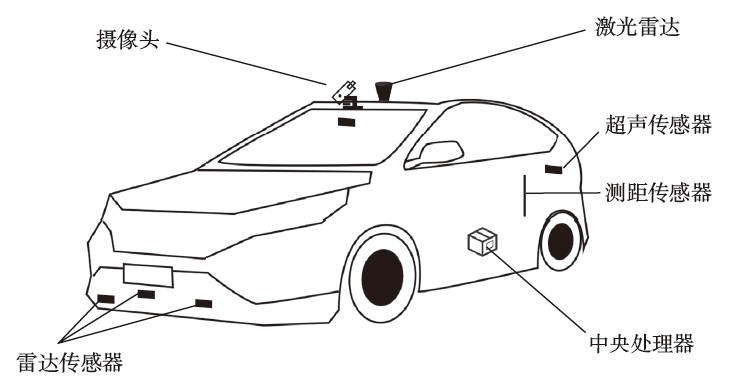
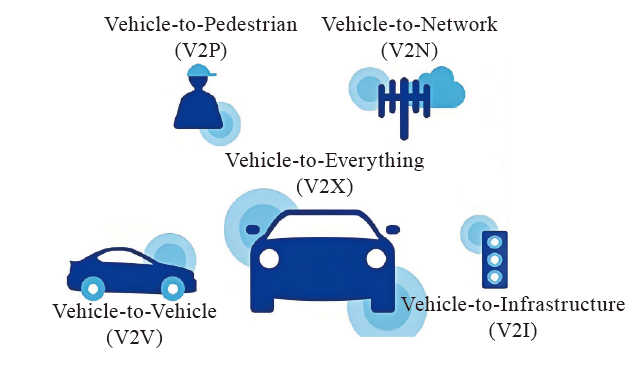
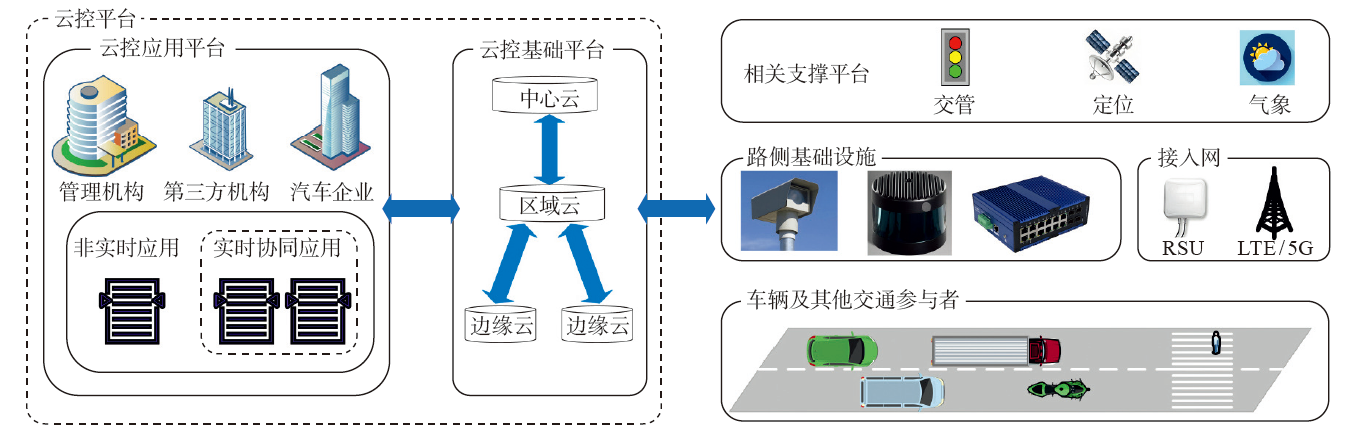
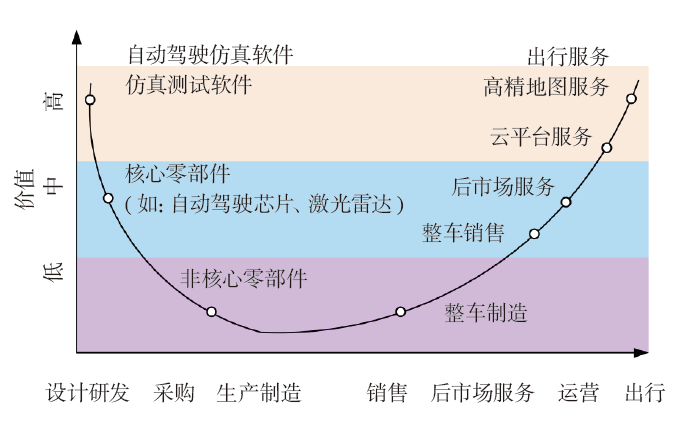
随着全球交通拥堵和安全问题的日益突出,自动驾驶技术的广泛应用被认为是解决这些问题的重要途径,单车智能技术(SAD)和智能车路协同系统(i-VICS)是当前自动驾驶领域的两大研究热点。本文阐述了单车智能和车路协同系统的基本概念和关键技术,讨论了单车智能中的感知定位、决策规划和控制执行技术,以及车路协同系统中的协同感知定位、协同通信和分级云控技术,并回顾了不同技术的研究成果;总结了中、美、德、日对自动驾驶技术路线的发展选择,并讨论了不同技术所带来的商业性产业链变革;剖析了单车智能和车路协同所面临的技术挑战,以及自动驾驶技术所面临的社会与法律挑战,并以此展望未来的发展方向,为自动驾驶技术的创新和应用提供参考。
中图分类号:
刘洋, 占佳豪, 李深, 李小鹏, 陈峻. 自动驾驶技术的未来:单车智能和智能车路协同[J]. 汽车安全与节能学报, 2024, 15(5): 611-633.
LIU Yang, ZHAN Jiahao, LI Shen, LI Xiaopeng, CHEN Jun. Future of autonomous driving: Single autonomous driving and intelligent vehicle-infrastructure collaboration systems[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 611-633.

| 数据集 | 年份 | 数据量/ (M pie) | 引用量 | |||||
|---|---|---|---|---|---|---|---|---|
| 图像 | 激光 | 雷达 | 2023 | 2022 | 2021 | |||
| Cityscapes [ | 2016 | 25 | — | — | 2 520 | 2 484 | 2 175 | |
| KITTI [ | 2013 | 15 | 15 | — | 2 430 | 1 610 | 1 417 | |
| NuScenes [ | 2019 | 1.4 | 400 | 1.3 | 1 620 | 1 093 | 667 | |
| Waymo [ | 2020 | 1 | 230 | — | 876 | 627 | 367 | |
| BDD100K [ | 2020 | 100 | — | — | 658 | 660 | 480 | |
| Argoverse [ | 2019 | 490 | 44 | — | 377 | 333 | 216 | |
| Mapillary Vistas [ | 2017 | 25 | — | — | 299 | 315 | 221 | |
| ApolloScape [ | 2019 | 147 | 80 | — | 127 | 145 | 105 | |
| CamVid [ | 2008 | 18 | √ | — | 116 | 134 | 137 | |
| 数据集 | 年份 | 数据量/ (M pie) | 引用量 | |||||
|---|---|---|---|---|---|---|---|---|
| 图像 | 激光 | 雷达 | 2023 | 2022 | 2021 | |||
| Cityscapes [ | 2016 | 25 | — | — | 2 520 | 2 484 | 2 175 | |
| KITTI [ | 2013 | 15 | 15 | — | 2 430 | 1 610 | 1 417 | |
| NuScenes [ | 2019 | 1.4 | 400 | 1.3 | 1 620 | 1 093 | 667 | |
| Waymo [ | 2020 | 1 | 230 | — | 876 | 627 | 367 | |
| BDD100K [ | 2020 | 100 | — | — | 658 | 660 | 480 | |
| Argoverse [ | 2019 | 490 | 44 | — | 377 | 333 | 216 | |
| Mapillary Vistas [ | 2017 | 25 | — | — | 299 | 315 | 221 | |
| ApolloScape [ | 2019 | 147 | 80 | — | 127 | 145 | 105 | |
| CamVid [ | 2008 | 18 | √ | — | 116 | 134 | 137 | |
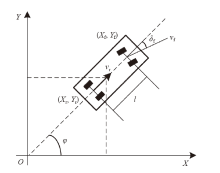
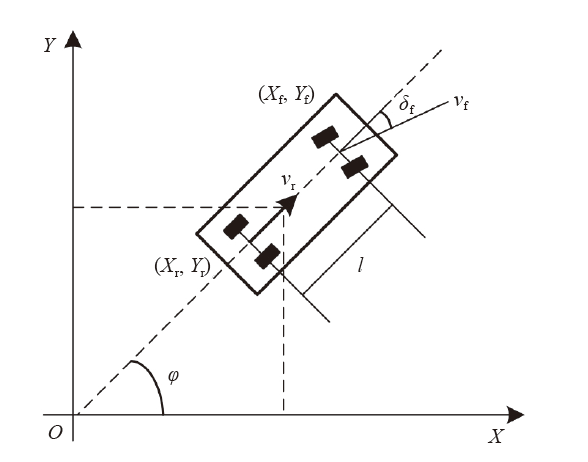
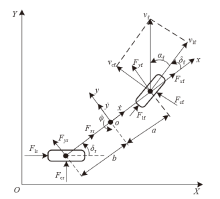
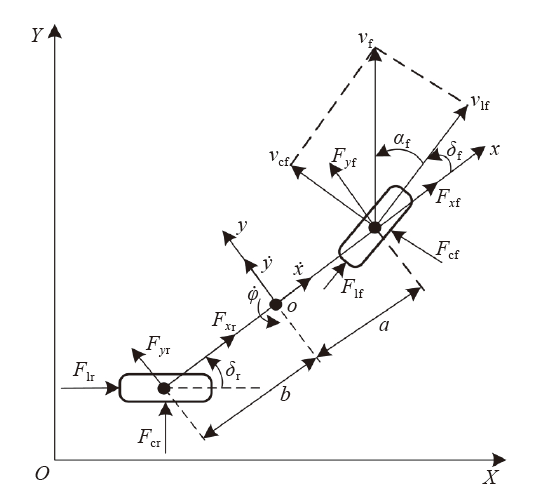
| OXY | 大地坐标系 |
|---|---|
| a | 前轮轴距 |
| φ | 绕z轴的横摆角 |
| Flf、Flr | 前后轮纵向力 (沿轮胎纵向) |
| Fxf、Fxr | 前后轮纵向力 (沿车体纵向) |
| δf、δr | 前后轮转角 |
| vlf | 前轮纵向速度 (沿轮胎纵向) |
| vf | 前轮合速度 |
| oxy | 车身坐标系 |
| b | 后轮轴距 |
| Iz | 绕Z轴的转动惯量 |
| Fcf、Fcr | 前后轮横向力 (沿轮胎横向) |
| Fyf、Fyr | 前后轮横向力 (沿车体横向) |
| αf | 前轮侧偏角 |
| vcf | 前轮横向速度 (沿轮胎横向) |
| m | 整车质量 |
| OXY | 大地坐标系 |
|---|---|
| a | 前轮轴距 |
| φ | 绕z轴的横摆角 |
| Flf、Flr | 前后轮纵向力 (沿轮胎纵向) |
| Fxf、Fxr | 前后轮纵向力 (沿车体纵向) |
| δf、δr | 前后轮转角 |
| vlf | 前轮纵向速度 (沿轮胎纵向) |
| vf | 前轮合速度 |
| oxy | 车身坐标系 |
| b | 后轮轴距 |
| Iz | 绕Z轴的转动惯量 |
| Fcf、Fcr | 前后轮横向力 (沿轮胎横向) |
| Fyf、Fyr | 前后轮横向力 (沿车体横向) |
| αf | 前轮侧偏角 |
| vcf | 前轮横向速度 (沿轮胎横向) |
| m | 整车质量 |





| [1] | SAE International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[J]. SAE International, 2018, 4970(724): 1-5. |
| [2] | Okuda R, Kajiwara Y, Terashima K. A survey of technical trend of ADAS and autonomous driving[C]// Tech Papers 2014 Int'l Sympo VLSI Design (ISVD), Automa Test, IEEE, 2014: 1-4. |
| [3] | SU Debing. $9.95M for ‘smart intersections’ across Ann Arbor[EB/OL]. (2021-01-08). https://news.umich.edu/9-95m-for-smart-intersections-across-ann-arbor/. |
| [4] | Meyer G. European roadmaps, programs, and projects for innovation in connected and automated road transport[C]// Road Vehi Auto 5. Springer Inter Publishing, 2019: 27-39. |
| [5] | Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: Common practices and emerging technologies[J]. IEEE Access, 2020, 8: 58443-58469. |
| [6] | Yeong D J, Velasco-Hernandez G, Barry J, et al. Sensor and sensor fusion technology in autonomous vehicles: A review[J]. Sensors, 2021, 21(6): 2140. |
| [7] | Atakishiyev S, Salameh M, YAO Henshuai, et al. Explainable artificial intelligence for autonomous driving: An overview and guide for future research directions[J]. IEEE Access, 2024, 12: 101603-101625. |
| [8] | CHEN Long, LI Yuchen, HUANG Chao, et al. Milestones in autonomous driving and intelligent vehicles: Survey of surveys[J]. IEEE Trans Intell Veh, 2022, 8(2): 1046-1056. |
| [9] | ZHANG Yi, PEI Huaxin, YAO Danya. Research review on cooperative decision- making for vehicle swarms in vehicle- infrastructure cooperative environment[J]. J Traffic Transp Eng, 2022, 22(3): 1-18. |
| [10] | DING Fei, ZHANG Nan, LI Hengbo, et al. A survey of architecture and key technologies of intelligent connected vehicle-road-cloud cooperation system[J]. Acta Automatica Sinica, 2022, 48(12): 2863-2885. |
| [11] | 林泓熠, 刘洋, 李深, 等. 车路协同系统关键技术研究进展[J]. 华南理工大学学报:自然科学版, 2023, 51(10): 46-67. |
| LIN Hongyi, LIU Yang, LI Shen, et al. Research progress on key technologies in the cooperative vehicle infrastructure system[J]. J South Chin Univ of Techn: Nat Sci Ed, 2023, 51(10): 46-67. (in Chinese) | |
| [12] | Hasan M, Mohan S, Shimizu T, et al. Securing vehicle-to-everything (V2X) communication platforms[J]. IEEE Trans Intell Veh, 2020, 5(4): 693-713. |
| [13] | Gschwendtner C, Sinsel S R, Stephan A. Vehicle-to-X (V2X) implementation: An overview of predominate trial configurations and technical, social and regulatory challenges[J]. Renew Sust Energ Rev, 2021, 145: Paper No 110977. |
| [14] | YI Yang, LUO Hengliang, XU Huarong, et al. Towards real-time traffic sign detection and classification[J]. IEEE Trans Intell Transp Syst, 2015, 17(7): 2022-2031. |
| [15] | Saadna Y, Behloul A. An overview of traffic sign detection and classification methods[J]. Int’l J Multimed Inf R, 2017, 6: 193-210. |
| [16] | Arnold E, Al-Jarrah O Y, Dianati M, et al. A survey on 3d object detection methods for autonomous driving applications[J]. IEEE Trans Intell Transp Syst, 2019, 20(10): 3782-3795. |
| [17] | CHEN Xiaozhi, MA Huiming, WAN Ji, et al. Multi-view 3d object detection network for autonomous driving[C]// Proce IEEE Conf Computer Vision Pattern Recog (CVPR). 2017: 1907-1915. |
| [18] | ZHANG Yuxiao, Carballo A, YANG Hanting, et al. Perception and sensing for autonomous vehicles under adverse weather conditions: A survey[J]. ISPRS J Photogramm, 2023, 196: 146-177. |
| [19] | Lee Y, Jeon J, Ko Y, et al. Task-driven deep image enhancement network for autonomous driving in bad weather[C]// 2021 IEEE Int'l Conf Robot Automation (ICRA). IEEE, 2021: 13746-13753. |
| [20] | Prakash A, Chitta K, Geiger A. Multi-modal fusion transformer for end-to-end autonomous driving[C]// Proce IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2021: 7077-7087. |
| [21] | XU Shu, ZHOU De, FANG Jian, et al. Fusionpainting: Multimodal fusion with adaptive attention for 3d object detection[C]// 2021 IEEE Int'l Intell Transp Syst Conf (ITSC). IEEE, 2021: 3047-3054. |
| [22] | Cordts M, Omran M, Ramos S, et al. The cityscapes dataset for semantic urban scene understanding[C]// Proc IEEE Conf Computer Vision Pattern Recog (CVPR). 2016: 3213-3223. |
| [23] | Geiger A, Lenz P, Urtasun R. Are we ready for autonomous driving? the kitti vision benchmark suite[C]// 2012 IEEE Conf Computer Vision Pattern Recog (CVPR). IEEE, 2012: 3354-3361. |
| [24] | Caesar H, Bankiti V, Lang A H, et al. nuscenes: A multimodal dataset for autonomous driving[C]// Proc IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2020: 11621-11631. |
| [25] | SUN Pei, Kretzschmar H, Dotiwalla X, et al. Scalability in perception for autonomous driving: Waymo open dataset[C]// Proc IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2020: 2446-2454. |
| [26] | YU Feishe, CHEN Haofeng, WANG Xin, et al. Bdd100k: A diverse driving dataset for heterogeneous multitask learning[C]// Proc IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2020: 2636-2645. |
| [27] | CHANG Minfang, Lambert J, Sangkloy P, et al. Argoverse: 3d tracking and forecasting with rich maps[C]// Proc IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2019: 8748-8757. |
| [28] | Neuhold G, Ollmann T, Rota Bulo S, et al. The mapillary vistas dataset for semantic understanding of street scenes[C]// Proc IEEE Int'l Conf Computer Vision (ICCV). 2017: 4990-4999. |
| [29] | HUANG Xinyu, WANG Peng, XIN Jingcheng, et al. The apolloscape open dataset for autonomous driving and its application[J]. IEEE Trans Pattern Anal Mach Intell, 2019, 42(10): 2702-2719. |
| [30] | Brostow G J, Shotton J, Fauqueur J, et al. Segmentation and recognition using structure from motion point clouds[C]// Computer Vision-ECCV 2008: 10th Euro Conf Computer Vision (ECCV), 2008: 44-57. |
| [31] | WANG Ye, LIU Zhenyi, DENG Weiwen. Anchor generation optimization and region of interest assignment for vehicle detection[J]. Sensors, 2019, 19(5): 1089. |
| [32] | ZHAN Huiqin, LIU Yuan, CUI Zhibin, et al. Pedestrian detection and behavior recognition based on vision[C]// 2019 IEEE Intell Transp Syst Conf (ITSC). IEEE, 2019: 771-776. |
| [33] | CHEN Lili, ZHANG Zhengdao, PENG Li. Fast single shot multibox detector and its application on vehicle counting system[J]. IET Intell Transp Syst, 2018, 12(10): 1406-1413. |
| [34] |
Ligorio G, Sabatini A M. A novel Kalman filter for human motion tracking with an inertial-based dynamic inclinometer[J]. IEEE Trans Biomed Eng, 2015, 62(8): 2033-2043.
doi: 10.1109/TBME.2015.2411431 pmid: 25775483 |
| [35] | XIAO Jingjing, Stolkin R, Oussalah M, et al. Continuously adaptive data fusion and model relearning for particle filter tracking with multiple features[J]. IEEE Sens J, 2016, 16(8): 2639-2649. |
| [36] | HUANG Bin, XIONG Hui, WANG Jianqiang, et al. Detection-level fusion for multi-object perception in dense traffic environment[C]// 2017 IEEE Int'l Conf Multisensor Fusion Integr Intell Syst (MFI). IEEE, 2017: 411-416. |
| [37] | Dewangan D K, Sahu S P. Road detection using semantic segmentation-based convolutional neural network for intelligent vehicle system[C]// Data Eng Commu Tech: Proc ICDECT 2020(DECT), 2021: 629-637. |
| [38] | WANG Jingdong, SUN Ke, CHENG Tianheng, et al. Deep high-resolution representation learning for visual recognition[J]. IEEE Trans Pattern Anal Mach Intell, 2020, 43(10): 3349-3364. |
| [39] | Mahmud M N, Osman M K, Ismail A P, et al. Road image segmentation using unmanned aerial vehicle images and DeepLab V3+ semantic segmentation model[C]// 2021 11th IEEE Int’l Conf Contr Syst, Compu Engineering (ICCSCE). IEEE, 2021: 176-181. |
| [40] | Paigwar A, Erkent Ö, Sierra-Gonzalez D, et al. Gndnet: Fast ground plane estimation and point cloud segmentation for autonomous vehicles[C]// 2020 IEEE/RSJ Int’l Conf Intel Robot Syst (IROS). IEEE, 2020: 2150-2156. |
| [41] | Aksoy E E, Baci S, Cavdar S. Salsanet: Fast road and vehicle segmentation in lidar point clouds for autonomous driving[C]// 2020 IEEE Intell Vehi Sympo (IV). IEEE, 2020: 926-932. |
| [42] | Arief H A, Arief M, Bhat M, et al. Density-adaptive sampling for heterogeneous point cloud object segmentation in autonomous vehicle applications[C]// CVPR Workshops. 2019: 26-33. |
| [43] | ZHOU Yin, Tuzel O. Voxelnet: End-to-end learning for point cloud based 3d object detection[C]// Proc IEEE Conf Compu Vision Pattern Recog (CVPR). 2018: 4490-4499. |
| [44] | SHI Shaoshuai, WANG Xiaogang, LI Hongsheng. Pointrcnn: 3d object proposal generation and detection from point cloud[C]// Proc IEEE/CVF Conf CompuVision Pattern Recog (CVPR). 2019: 770-779. |
| [45] | SHI Weijing, Rajkumar R. Point-gnn: Graph neural network for 3d object detection in a point cloud[C]// Proc IEEE/CVF Conf Compu Vision Pattern Recog (CVPR). 2020: 1711-1719. |
| [46] | MA Fangchang, Karaman S. Sparse-to-dense: Depth prediction from sparse depth samples and a single image[C]// 2018 IEEE Int'l Conf Robot Automation (ICRA). IEEE, 2018: 4796-4803. |
| [47] | HE Kaiming, ZHANG Xianuyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]// Proc IEEE Conf CompuVision Pattern Recog (CVPR). 2016: 770-778. |
| [48] | Eldesokey A, Felsberg M, Khan F S. Confidence propagation through cnns for guided sparse depth regression[J]. IEEE Trans Pattern Anal Mach Intell, 2019, 42(10): 2423-2436. |
| [49] | Valada A, Mohan R, Burgard W. Self-supervised model adaptation for multimodal semantic segmentation[J]. Int J Comput Vis, 2020, 128(5): 1239-1285. |
| [50] | TANG Jie, TIAN Feipeng, FENG Wei, et al. Learning guided convolutional network for depth completion[J]. IEEE Trans Image Process, 2020, 30: 1116-1129. |
| [51] | Gansbeke W Van, Neven D, Brabandere B De, et al. Sparse and noisy lidar completion with rgb guidance and uncertainty[C]// 2019 16th Int'l Conf Mach Vision Appl (MVA), IEEE, 2019: 1-6. |
| [52] | LU Yongqiang, MA Hongjie, Smart E, et al. Real-time performance-focused localization techniques for autonomous vehicle: A review[J]. IEEE Trans Intell Transp Syst, 2021, 23(7): 6082-6100. |
| [53] |
Peyraud S, Bétaille D, Renault S, et al. About non-line-of-sight satellite detection and exclusion in a 3D map-aided localization algorithm[J]. Sensors, 2013, 13(1): 829-847.
doi: 10.3390/s130100829 pmid: 23344379 |
| [54] | Amini A, Vaghefi R M, de la Garza J M, et al. Improving GPS-based vehicle positioning for intelligent transportation systems[C]// 2014 IEEE Int'l Veh Sympo Proc (IV), IEEE, 2014: 1023-1029. |
| [55] | Park S G, Cho D J. Smart framework for GNSS-based navigation in urban environments[J]. Int’l J Satell Commn N, 2017, 35(2): 123-137. |
| [56] | LU Wenjie, Rodríguez F S A, Seignez E, et al. Lane marking-based vehicle localization using low-cost GPS and open source map[J]. Unmanned Syst, 2015, 3(04): 239-251. |
| [57] | Adjrad M, Groves P D. Enhancing least squares GNSS positioning with 3D mapping without accurate prior knowledge[J]. Navig J Inst Navig, 2017, 64(1): 75-91. |
| [58] | Kumar R, Petovello M G. A novel GNSS positioning technique for improved accuracy in urban canyon scenarios using 3D city model[C]// Proc 27th Int'l Vehi Sympo Tech Meeting of the Satellite Division of the Institute of Navigation (ION GNSS). 2014: 2139-2148. |
| [59] | Vedder B, Vinter J, Jonsson M. A low-cost model vehicle testbed with accurate positioning for autonomous driving[J]. J Robot, 2018, 2018: 1-10. |
| [60] | WU Bingfei, Lee T T, Chang H H, et al. GPS navigation based autonomous driving system design for intelligent vehicles[C]// 2007 IEEE Int'l Conf Syst, Man Cybernetics (MC). IEEE, 2007: 3294-3299. |
| [61] | Han J, Park C, Jang Y Y. Development of a moving baseline RTK/motion sensor-integrated positioning-based autonomous driving algorithm for a speed sprayer[J]. Sensors, 2022, 22(24): 9881. |
| [62] | Debeunne C, Vivet D. A review of visual-LiDAR fusion based simultaneous localization and mapping[J]. Sensors, 2020, 20(7): 2068. |
| [63] | Milz S, Arbeiter G, Witt C, et al. Visual slam for automated driving: Exploring the applications of deep learning[C]// Proc IEEE Conf Computer Vision Pattern Recog Workshops (CVPR). 2018: 247-257. |
| [64] | Kim C, Cho S, Sunwoo M, et al. Updating point cloud layer of high definition (hd) map based on crowd-sourcing of multiple vehicles installed lidar[J]. IEEE Access, 2021, 9: 8028-8046. |
| [65] | DAI Kai, SUN Bohua, WU Guanpu, et al. LiDAR-Based sensor fusion SLAM and localization for autonomous driving vehicles in complex scenarios[J]. J Imaging, 2023, 9(2): 52. |
| [66] | Gipps P G. A behavioural car-following model for computer simulation[J]. Transp Res B-Meth, 1981, 15(2): 105-111. |
| [67] | Gipps P G. A model for the structure of lane-changing decisions[J]. Transp Res B-Meth, 1986, 20(5): 403-414. |
| [68] | Kesting A, Treiber M, Helbing D. General lane-changing model MOBIL for car-following models[J]. Transp Res Rec, 2007, 1999(1): 86-94. |
| [69] | YANG Lan, ZHAN Jiahao, SHANG Wenlong, et al. Multi-lane coordinated control strategy of connected and automated vehicles for on-ramp merging area based on cooperative game[J]. IEEE Trans Intell Transp Syst, 2023, 24(11): 13448-13461. |
| [70] | Ahmed K I. Modeling drivers’ acceleration and lane changing behavior[D]. Cambridge: Department of Civil and Environmental Engineering, MIT, 1999. |
| [71] | Ahmed K, Ben-Akiva M, Koutsopoulos H, et al. Models of freeway lane changing and gap acceptance behavior[J]. Transp Traff Theo, 1996, 13: 501-515. |
| [72] | QU Xiaobo, LIN Hongyi, LIU Yang. Envisioning the future of transportation: Inspiration of ChatGPT and large models[J]. Commun Transp Res, 2023, 3: 100103. |
| [73] | SHI Xiupeng, Wong Y D, CHAI Chen, et al. An automated machine learning (AutoML) method of risk prediction for decision-making of autonomous vehicles[J]. IEEE Trans Intell Transp Syst, 2020, 22(11): 7145-7154. |
| [74] | LI Liangzhi, Ota K, Dong M. Humanlike driving: Empirical decision-making system for autonomous vehicles[J]. IEEE Trans Vehi, 2018, 67(8): 6814-6823. |
| [75] | XU Xin, ZUO Lei, LI Xin, et al. A reinforcement learning approach to autonomous decision making of intelligent vehicles on highways[J]. IEEE Trans Syst Man Cybern Syst, 2018, 50(10): 3884-3897. |
| [76] | Hoel C J, Driggs-Campbell K, Wolff K, et al. Combining planning and deep reinforcement learning in tactical decision making for autonomous driving[J]. IEEE Trans Intell Veh, 2019, 5(2): 294-305. |
| [77] | Pomerleau D A. Alvinn: An autonomous land vehicle in a neural network[J]. Adv Neural Inf Process Syst, 1988, 1. |
| [78] | ZHENG Jian, Suzuki K, Fujita M. Predicting driver’s lane-changing decisions using a neural network model[J]. Simul Model Pract Theory, 2014, 42: 73-83. |
| [79] | ZHAO Junwu, QU Ting, XU Fang. A deep reinforcement learning approach for autonomous highway driving[J]. IFAC-PapersOnLine, 2020, 53(5): 542-546. |
| [80] | YE Yingjun, ZHANG Xiaohui, SUN Jian. Automated vehicle’s behavior decision making using deep reinforcement learning and high-fidelity simulation environment[J]. Transp Res Part C Emerg Technol, 2019, 107: 155-170. |
| [81] | GAO Xin, LI Xueyuan, LIU Qi, et al. Multi-agent decision-making modes in uncertain interactive traffic scenarios via graph convolution-based deep reinforcement learning[J]. Sensors, 2022, 22(12): 4586. |
| [82] | LI Bai, SHAO Zhijiang, ZHANG Youmin, et al. Nonlinear programming for multi-vehicle motion planning with homotopy initialization strategies[C]// IEEE Conf Auto Sci Eng (ASE), 2017: 118-123 |
| [83] | ZHU Dandan, SUN Junqun. A new algorithm based on Dijkstra for vehicle path planning considering intersection attribute[J]. IEEE Access, 2021, 9: 19761-19775. |
| [84] | WANG Chunbao, WANG Lin, QIn Jian, et al. Path planning of automated guided vehicles based on improved A-Star algorithm[C]// 2015 IEEE Int'l Conf Inform Auto (ICIA). IEEE, 2015: 2071-2076. |
| [85] | Choi J, Curry R, Elkaim G. Path planning based on bézier curve for autonomous ground vehicles[C]// Adva Electri Electro Engineering-IAENG Special Ed World Congress Engineering and Computer Sci, IEEE, 2008: 158-166. |
| [86] | Berglund T, Brodnik A, Jonsson H, et al. Planning smooth and obstacle-avoiding B-spline paths for autonomous mining vehicles[J]. IEEE Trans Autom Sci Eng, 2009, 7(1): 167-172. |
| [87] | LI Hongcai, KIU Wenjie, YANG Chao, et al. An optimization-based path planning approach for autonomous vehicles using the DynEFWA-artificial potential field[J]. IEEE Trans Intell Vehi, 2021, 7(2): 263-272. |
| [88] | HUANG Yanjun, DING Haitao, ZHANG Yubiao, et al. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach[J]. IEEE Trans Indu Electron, 2019, 67(2): 1376-1386. |
| [89] | Kulatunga A K, Liu D K, Dissanayake G, et al. Ant colony optimization based simultaneous task allocation and path planning of autonomous vehicles[C]// 2006 IEEE Conf Cyber Intell Syst (CCIS), IEEE, 2006: 1-6. |
| [90] | Lamini C, Benhlima S, Elbekri A. Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Comput Sci, 2018, 127: 180-189. |
| [91] | GE Qingying, LI Aijuan, LI Shaohua, et al. Improved bidirectional RRT * path planning method for smart vehicle[J]. Math Probl Eng, 2021, 2021(1): 6669728. |
| [92] | MAI Xiquan, LI Di, OUYANG Jian, et al. An improved dynamic window approach for local trajectory planning in the environment with dense objects[C]// J Physics: Conf Series. IOP Publishing, 2021, 1884(1): 012003. |
| [93] | LIU Yonggang, ZHOU Bobo, WANG Xiao, et al. Dynamic lane-changing trajectory planning for autonomous vehicles based on discrete global trajectory[J]. IEEE Trans Intell Transp Syst, 2021, 23(7): 8513-8527. |
| [94] | DAI Changhua, ZONG Changfu, ZHANG Dong, et al. Human-like lane-changing trajectory planning algorithm for human-machine conflict mitigation[J]. J Intell Connect Veh, 2023, 6(1): 46-63 |
| [95] | Nilsson J, Brännström M, Coelingh E, et al. Lane change maneuvers for automated vehicles[J]. IEEE Trans Intell Transp Syst, 2016, 18(5): 1087-1096. |
| [96] | Hamada Y, Ikawa M, Fuhii M, et al. Traveling lane determining device and traveling lane determining method: U.S. Patent Application 15/577, 687[P]. 2018-06-14. |
| [97] | CAO Haotian, SONG Xiaolin, HUANG Zhenyu, et al. Simulation research on emergency path planning of an active collision avoidance system combined with longitudinal control for an autonomous vehicle[J]. Proc Inst Mech Eng Part D J Automob, 2016, 230(12): 1624-1653. |
| [98] | BAI Zhengwei, CAI Baigen, SHANGGUAN Wei, et al. Deep learning based motion planning for autonomous vehicle using spatiotemporal LSTM network[C]// 2018 Chin Automation Congress (CAC), IEEE, 2018: 1610-1614. |
| [99] | Samuel M, Hussein M, Mohamad M B. A review of some pure-pursuit based path tracking techniques for control of autonomous vehicle[J]. Int’l J Comput Appl Technol, 2016, 135(1): 35-38. |
| [100] | AbdElmoniem A, Osama A, Abdelaziz M, et al. A path-tracking algorithm using predictive Stanley lateral controller[J]. Int J Adv Robot Syst, 2020, 17(6): 1-11 |
| [101] | Farag W. Complex trajectory tracking using PID control for autonomous driving[J]. Int’l J Intell Transp, 2020, 18(2): 356-366. |
| [102] | CHEN Jianyu, ZHAN wei, Tomizuka M. Autonomous driving motion planning with constrained iterative LQR[J]. IEEE Trans Intell Vehi, 2019, 4(2): 244-254. |
| [103] | Kong J, Pfeiffer M, Schildbach G, et al. Kinematic and dynamic vehicle models for autonomous driving control design[C]// 2015 IEEE Intell Vehi Sympo (IV), IEEE, 2015: 1094-1099. |
| [104] | YU Liangyao, WANG Ruyue. Researches on adaptive cruise control system: A state of the art review[J]. P I Mech Eng D-J Auto, 2022, 236(2-3): 211-240. |
| [105] | CAO Zhong, YANG Diange, JIANG Kun, et al. End-to-end adaptive cruise control based on timing network[C]// Proc 19th Asia Pacific Auto Engineering Conf SAE-China Congr 2017: Sele Papers, 2019: 839-852. |
| [106] | ZHAO Shuo, YU Qiang, LI Shihao, et al. Adaptive cruise hierarchical control strategy based on MPC[J]. Int’l J Vehi Info Commun, 2021, 6(2): 161-184. |
| [107] | YANG Wei., ZhANG Xiang., LEI Qian., et al. Research on longitudinal active collision avoidance of autonomous emergency braking pedestrian system (AEB-P)[J]. Sensors, 2019, 19(21):46-71. |
| [108] | HAN Ichun, LUAN Bicheng, Hsieh F C. Development of autonomous emergency braking control system based on road friction[C]// 2014 IEEE Int'l Conf Auto Sci Engineering (CASE), IEEE, 2014: 933-937. |
| [109] | DING Haitao, LI Wwei, XU Nan, et al. An enhanced eco-driving strategy based on reinforcement learning for connected electric vehicles: cooperative velocity and lane-changing control[J]. J Intell Connect Veh, 2022, 5(3): 316-332. |
| [110] | HE Yixu, LIU Yang, YANG Lan, et al. Deep adaptive control: Deep reinforcement learning-based adaptive vehicle trajectory control algorithms for different risk levels[J]. IEEE Trans Intell Veh, 2024, 9(1): 1654-1666. |
| [111] | WANG Wenxuan, ZHANG Yuhang, GAO Jiaxin, et al. GOPS: A general optimal control problem solver for autonomous driving and industrial control applications[J]. Commun Transport Res, 3, 100096. |
| [112] | ZHANG Yi, PEI Huaxin, YAO Danya. Research review on cooperative decision- making for vehicle swarms in vehicle-infrastructure cooperative environment[J]. J Traffic Transp Eng, 2022, 22(3): 1-18. |
| [113] | Moharm K I, Zidane E F, El-Mahdy M M, et al. Big data in ITS: Concept, case studies, opportunities, and challenges[J]. IEEE Trans Intell Transp Syst, 2018, 20(8): 3189-3194. |
| [114] | KENNEDY J O. Sensor data fusion for improving traffic mobility in smart Cities[D]. Sheffield: Department of Automatic Control and Systems Engineering University of Sheffield, 2020. |
| [115] | AN Xin, CAI Bogen, SHANG Guanwei. Vehicle road cooperative roadside perception fusion method[J]. Meas. Control, 2022, 41(2): 1-12+35. |
| [116] | WANG Binglu, JIN Yang, ZHANG Lei, et al. Collaborative perception method based on multisensor fusion[J]. J Radars, 2023, 13(1): 87-96. |
| [117] | LIU Weijie, Muramatsu S, Okubo Y. Cooperation of V2I/P2I communication and roadside radar perception for the safety of vulnerable road users[C]// 2018 16th Int'l Conf on Intell Transp Syst Tele (ITST). IEEE, 2018: 1-7. |
| [118] | MO Yanghui, ZHANG Peilin, CHEN Zhijun, et al. A method of vehicle-infrastructure cooperative perception based vehicle state information fusion using improved kalman filter[J]. Multimed Tools Appl, 2022: 1-18. |
| [119] | LI Yicheng, HU Zhaozheng, CAI Yinfeng, et al. Visual map-based localization for intelligent vehicles from multi-view site matching[J]. IEEE Trans Intell Transp Syst, 2020, 22(2): 1068-1079. |
| [120] | WANG Bo, CHENChunqiang, ZHANGTianchen. Commercial vehicle road collaborative system based on 5G-V2X and satellite navigation technologies[C]// Chin Satel Navi Conf (CSNC 2021), 2021, I: 274-282. |
| [121] | Hossain M A, Elshafiey I, Al-Sanie A. Cooperative vehicular positioning with VANET in urban environments[C]// 2016 IEEE Asia-Pacific Conf Appl Electromag (APACE). IEEE, 2016: 393-396. |
| [122] | LIU Siyuan, HE Dazhi, XU Yin, et al. Adaptive vehicle cooperative positioning system with uncertain gps visibility and neural network-based improved approach[C]// 2018 IEEE/CIC Int'l Conf Commun in Chin (ICCC Workshops). IEEE, 2018: 303-308. |
| [123] | ZHANG Guohao, Ng H F, WEN Weisong, et al. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization[J]. IEEE Trans Intell Transp Syst, 2020, 22(10): 6175-6187. |
| [124] | YU Haibo, LUO Yizhen, SHU Mao, et al.Dair-v2x: A large-scale dataset for vehicle-infrastructure cooperative 3d object detection[C]// Proc IEEE/CVF Conf Computer Vision Pattern Recog (CVPR). 2022: 21361-21370. |
| [125] | Kenney J B. Dedicated short-range communications (DSRC) standards in the United States[J]. Proc IEEE Inst Electr Electron Eng, 2011, 99(7): 1162-1182. |
| [126] | CHEN Shanzhi, HU Jinlin, YAN Shi, et al. LTE-V: A TD-LTE-based V2X solution for future vehicular network[J]. IEEE Internet Things J, 2016, 3(6): 997-1005. |
| [127] | Bagheri H, Noor-A-Rahim M, LIU Zilong, et al. 5G NR-V2X: Toward connected and cooperative autonomous driving[J]. IEEE Communi Stan Maga, 2021, 5(1): 48-54. |
| [128] | Hartenstein H, Laberteaux L P. A tutorial survey on vehicular ad hoc networks[J]. IEEE Commun Maga, 2008, 46(6): 164-171. |
| [129] | Ahangar M N, Ahmed Q Z, Khan F A, et al. A survey of autonomous vehicles: Enabling communication technologies and challenges[J]. Sensors, 2021, 21(3): 706. |
| [130] | Toor Y, Muhlethaler P, Laouiti A, et al. Vehicle ad hoc networks: Applications and related technical issues[J]. IEEE Commun Surv Tutor, 2008, 10(3): 74-88. |
| [131] | ZHANG Rui, YAN Feng, XIA Weiwei, et al. An optimal roadside unit placement method for vanet localization[C]// GLOBECOM 2017-2017 IEEE Global Commun Conf, IEEE, 2017: 1-6. |
| [132] | Ferrag M A, Maglaras L, Ahmim A. Privacy-preserving schemes for ad hoc social networks: A survey[J]. IEEE Commun Surv Tutor, 2017, 19(4): 3015-3045. |
| [133] | Darbha S, Konduri S, Pagilla P. R. Benefits of V2V communication for autonomous and connected vehicles[J]. IEEE Trans on Intell Transp Syst, 2018, 20(5): 1954-1963. |
| [134] | XIE Guoqi, LI Yanwen, HAN Yunbo, et al. Recent Advances and Future Trends for Automotive Functional Safety Design Methodologies[J]. IEEE Trans Indu Info, 2020, 16(9):5629-5642. |
| [135] | Hussein A, Garcia F, Armingol J M, et al. P2V and V2P communication for pedestrian warning on the basis of autonomous vehicles[C]// 2016 IEEE 19th Int'l Conf Intell Transp Syst (ITSC). IEEE, 2016: 2034-2039. |
| [136] | Pawade S, Shah S, Tijare D. ZigBee based intelligent driver assistance system[J]. Int’l J Eng Res Indu Appl, 2013, 3: 1463-1468. |
| [137] | Yassein M B, Al-Maolegi M, Khamayseh Y, et al. Smart system for busy roads using short range wireless technologies[J]. Int’l J Math Comput Simu, 2015, 9:146-152. |
| [138] | San Martín J, Cortés A, Zamora-Cadenas L, et al. Precise positioning of autonomous vehicles combining UWB ranging estimations with on-board sensors[J]. Electronics, 2020, 9(8): 1238. |
| [139] | GAO Song, Lim A, Bevly D. An empirical study of DSRC V2V performance in truck platooning scenarios[J]. Digit Commun Netw, 2016, 2(4): 233-244. |
| [140] | Molina-Masegosa R, Gozalvez J. LTE-V for sidelink 5G V2X vehicular communications: A new 5G technology for short-range vehicle-to-everything communications[J]. IEEE Vehi Technol Mag, 2017, 12(4): 30-39. |
| [141] | Gonzalez-Martín M, Sepulcre M, Molina-Masegosa R, et al. Analytical models of the performance of C-V2X mode 4 vehicular communications[J]. IEEE Trans Vehi, 2018, 68(2): 1155-1166. |
| [142] | Andrews J G, Buzzi S, Choi W, et al. What will 5G be?[J]. IEEE J Sel Areas Commun, 2014, 32(6): 1065-1082. |
| [143] | PENG Haixia, LI Dazhou, Abboud K, et al. Performance analysis of IEEE 802.11 p DCF for multiplatooning communications with autonomous vehicles[J]. IEEE Trans Vehi, 2016, 66(3): 2485-2498. |
| [144] | Fernandes P, Nunes U. Multiplatooning leaders positioning and cooperative behavior algorithms of communicant automated vehicles for high traffic capacity[J]. IEEE Trans Intell Transp Syst, 2014, 16(3): 1172-1187. |
| [145] | ZENG Tenchan, Semiari O, Saad W, et al. Integrated communications and control co-design for wireless vehicular platoon systems[C]// 2018 IEEE Int'l Conf Commun (ICC), IEEE, 2018: 1-6. |
| [146] | Bento L C, Parafita R, Nunes U. Intelligent traffic management at intersections supported by V2V and V2I communications[C]// 2012 15th Int'l IEEE Conf Intell Transp Syst, IEEE, 2012: 1495-1502. |
| [147] | LI Yuying, LIU Qipeng. Intersection management for autonomous vehicles with vehicle-to-infrastructure communication[J]. PLoS one, 2020, 15(7): e0235644. |
| [148] | FANG Yukun, MIN Haigen, WU Xia, et al. On-ramp merging strategies of connected and automated vehicles considering communication delay[J]. IEEE Trans Intell Transp Syst, 2022, 23(9): 15298-15312. |
| [149] | WANG Jiadai, LIU Jiajia, Nei K. Networking and communications in autonomous driving: A survey[J]. IEEE Commun Surv Tutor, 2018, 21(2): 1243-1274. |
| [150] | LIU Shaoshan, LIU liangkai, TANG Jie, et al. Edge computing for autonomous driving: opportunities and challenges[J]. Proc IEEE Inst Electr Electron Eng, 2019, 107(8): 1697-1716. |
| [151] | Gavankar T, Joshi A, Sharma S. Distributed computing and image processing for autonomous driving systems[C]// 2018 IEEE Distributed Computing, VLSI, Electrical Circuits and Robotics (DISCOVER). IEEE, 2018: 13-18. |
| [152] | Spryn M, Sharma A, Parkar D, et al. Distributed deep reinforcement learning on the cloud for autonomous driving.[C]// Proc 1st Int'l Workshop Software Engineering AI Autonomous Systems, 2018: 16-22. |
| [153] | ZHOU Su, HUI Yilong, and Tom H. Luan. Distributed task allocation to enable collaborative autonomous driving with network softwarization[J]. IEEE J Sel Areas Commun, 2018, 36(10): 2175-2189. |
| [154] | Muhammad U Y, Ashiq A, Mohsen F, et al. Cloud-based video analytics using convolutional neural networks[J]. Softeare Pract Exoer, 49.4 (2019): 565-583. |
| [155] | WANG Ruijun, LIU Liangkai, SHI Weisong. HydraSpace: computational data storage for autonomous vehicles[C]// 2020 IEEE 6th Int'l Conf Collabor Internet Computing (CIC) (CIC), IEEE, 2020: 70-77. |
| [156] | YU Rong, ZHANG Yan, Gjessing S, et al. Toward cloud-based vehicular networks with efficient resource management[J]. IEEE Netw, 2013, 27(5): 48-55. |
| [157] | HUANG Yaodong, SONG Xintong, YE Fan, et al. Fair and efficient caching algorithms and strategies for peer data sharing in pervasive edge computing environments[J]. IEEE Trans Mob Comput, 2019, 19(4): 852-864. |
| [158] | 中国智能网联汽车产业创新联盟. 车路云一体化系统白皮书[EB/OL]. (2023-2-11). http://www.caicv.org.cn/. |
| China Industry Innovation Alliance for the Intelligent and Conneted Vehicles. Vehicle-road-cloud integrated system white paper[EB/OL]. (2023-2-11). http://www.caicv.org.cn/. (in Chinese) | |
| [159] | 中国智能网联汽车产业创新联盟. 智能网联汽车技术路线图2.0[EB/OL]. (2020-11-19). http://www.caicv.org.cn/. |
| China Industry Innovation Alliance for the Intelligent and Conneted Vehicles. Intelligent connected vehicle technology roadmap 2.0[EB/OL]. (2020-11-19). http://www.caicv.org.cn/. (in Chinese) | |
| [160] |
李克强, 常雪阳, 李家文, 等. 智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12): 1595-1605.
doi: 10.19562/j.chinasae.qcgc.2020.12.001 |
| LI Keqiang, CHANG Xueyang, LI Jiawen, et al. Cloud control system for intelligent and connected vehicles and its application[J]. Autom Engineering, 2020, 42(12):1595-1605. (in Chinese) | |
| [161] | Wright S. Autonomous cars generate more than 300 TB of data per year[EB/OL]. (2022-05-12). https://www.tuxera.com/blog/autonomous-cars-300-tb-of-data-per-year. |
| [162] | Byford S. Nokia sells here map unit to Audi, BMW, and Mercedes for $3 billion[EB/OL]. (2015-08-03). https://www.theverge.com/2015/8/3/9088727/nokia-sells-here-maps. |
| [163] | Bleiben L, Werden L, Einleiten R. Strategie automatisiertes und vernetztes Fahren[EB/OL]. (2015-11-16). https://www.bundesregierung.de/breg-de/service/publikationen/strategie-automatisiertes-und-vernetztes-fahren-729794. |
| [164] | Pierce A. Toyota’s Woven City of the future[J]. Techdirections, 2020, 2. |
| [165] | Lenox M, McDermott J. Driving Waymo's fully autonomous future[EB/OL]. (2022-01-24). https://ssrn.com/abstract=4014646. |
| [166] | LeBeau P. Waymo starts commercial ride-share service. CNBC[EB/OL]. (2018-12-05). https://www.cnbc.com/2018/12/05/waymo-starts-commercial-ride-share-service.html. |
| [167] | White J. GM buys Cruise Automation to speed self-driving car strategy, REUTERS[EB/OL]. (2016-5-11). https://www.reuters.com/article/us-gm-cruiseautomation-idUSKCN0WD1ND/.. |
| [168] | Kasmar J. Drivered autonomous vehicle passenger service deployment program[EB/OL]. (2022-2-28). https://www.cpuc.ca.gov/-/media/cpuc-website/divisions/consumer-protection-and-enforcement-division/documents/tlab/av-programs/20220228-cruise-tcp-a———drivered-deployment.pdf. |
| [169] | Aisin Seiki Co Ltd, ADVICS Co Ltd, JTEKT Corporation, et al. AISIN, ADVICES, JTEKT, and DENSO to form a new company to develop integrated control software for automated driving[EB/OL]. (2018-12-26). https://www.denso.com/global/en/news/newsroom/2018/20181226-g01/.. |
| [170] | Herger M. 2022 disengagement report from California[EB/OL]. (2023-2-17). https://thelastdriverlicenseholder.com/2023/02/17/2022-disengagement-report-from-california/. |
| [171] | LU Chunfang, MA Chengxian, JIANG Yuan, et al. Counter measures suggestions of development and research for vehicle infrastructure cooperation industry in China[J]. Chin J Highw Transp, 2023, 36(03): 225-233. |
| [172] | BAIDU. Apollo intelligent transportation white paper[EB/OL]. (2022-04-09). https://iot-automotive.news/baidu-apollo-releases-white-paper-on-intelligent-transportation/. |
| [173] | EHANGZHOU. Alibaba permitted to test self-driving vehicles on Hangzhou streets[EB/OL]. (2018-09-25). https://www.ehangzhou.gov.cn/2018-09/25/c_267758.htm. |
| [174] | Tencent. Urban mobility reinvented: tencent’s autonomous driving road paves the way to greener cities[EB/OL]. ( 2023-08-24). https://www.tencent.com/en-us/articles/2201669.html. |
| [175] | Badweeti K N, Malaghan V D, Pawar D S, et al. Evaluating effectiveness and acceptance of advanced driving assistance systems using field operational test[J]. J Intell Connect Vehi, 2023, 6(2), 65-78. |
| [176] | Olovsson T, Svensson T, WU Jiaming. Future connected vehicles: Communications demands, privacy and cyber-security[J]. Commun Transport Res, 2022, 2(1): 100056. |
| [177] | WANG Kai, LI Aoyong, QU Xiaobo. Urban aerial mobility: Network structure, transportation benefits, and Sino-US comparison[J]. Innov, 2023, 4(2): Paper No 100393. |
| [178] | QU Xiaobo, ZENG Ziling, WANG Kai, et al. Replacing urban trucks via ground-air cooperation[J]. Commun Transport Res, 2022, 2: Paper No 100080. |
| [179] | LIU Xiaohan, QU Xiaobo, MA Xiaolei. Improving flex-route transit services with modular autonomous vehicles[J]. Transport RES E-Log, 2021, 149: Paper No 102331. |
| [180] | WU Jiaming, Balázs K, QU Xiaobo. A modular, adaptive, and autonomous transit system (MAATS): An in-motion transfer strategy and performance evaluation in urban grid transit networks[J]. Transp Res Part A Policy Pract, 2021, 151: 81-98. |
| [1] | 张永升, 李逸椆, 王亮, 徐志刚. 智能网联环境下车载终端的发展现状与挑战[J]. 汽车安全与节能学报, 2024, 15(3): 295-308. |
| [2] | 周晶, 彭晖. 基于伺服环动力学的自适应巡航控制系统串行稳定性研究[J]. 汽车安全与节能学报, 2010, 1(1): 30-39. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||