欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2022, Vol. 13 ›› Issue (4): 738-749.DOI: 10.3969/j.issn.1674-8484.2022.04.015
朱波1,2( ), 张纪伟1(), 谈东奎1,2,*(), 胡旭东1
), 张纪伟1(), 谈东奎1,2,*(), 胡旭东1
收稿日期:2022-05-21
修回日期:2022-07-25
出版日期:2022-12-31
发布日期:2023-01-01
通讯作者:
谈东奎
作者简介:*谈东奎,助理研究员。E-mail:tandongkui@126.com。基金资助:
ZHU Bo1,2(), ZHANG Jiwei1(), TAN Dongkui1,2,*(), HU Xudong1
Received:2022-05-21
Revised:2022-07-25
Online:2022-12-31
Published:2023-01-01
Contact:
TAN Dongkui
摘要:
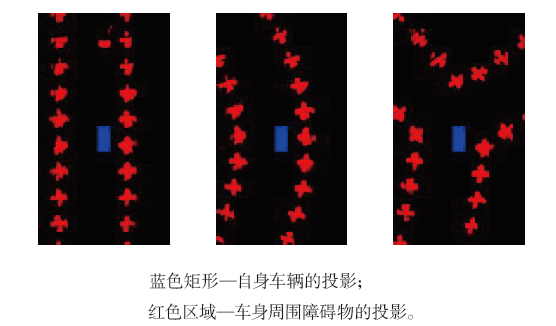
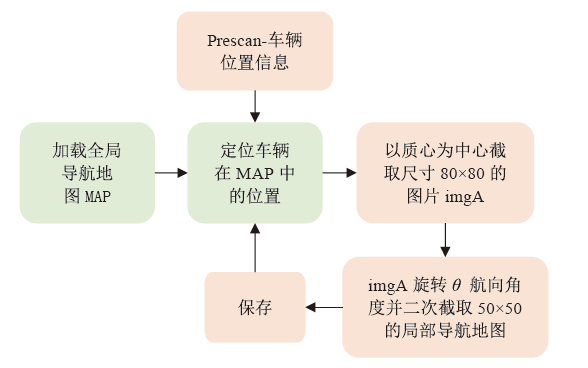
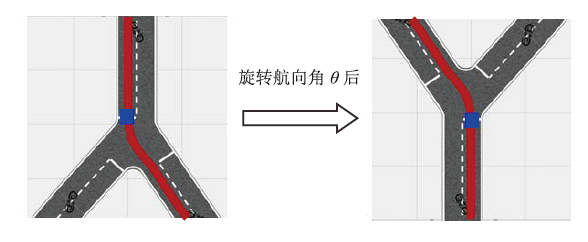
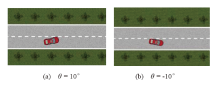
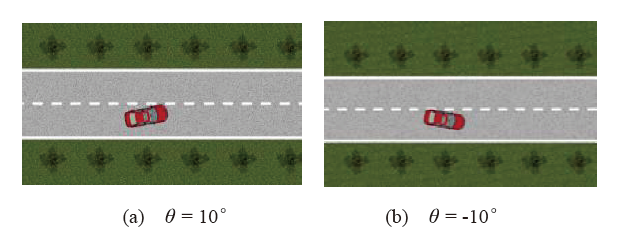
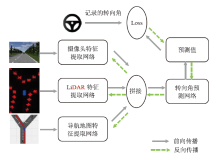
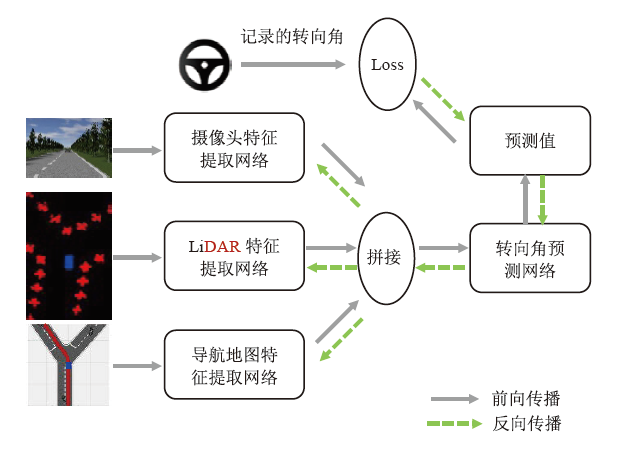
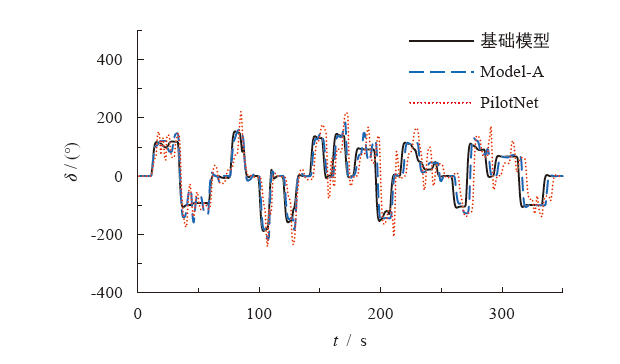
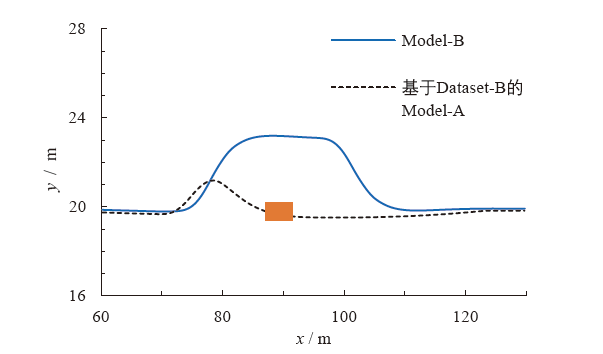
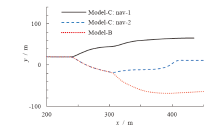
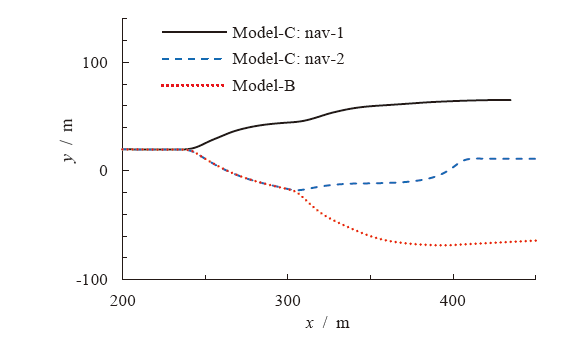
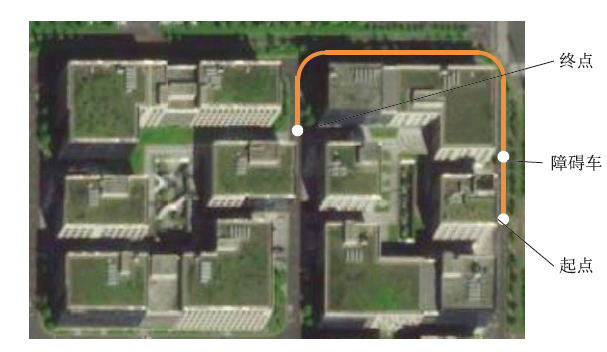
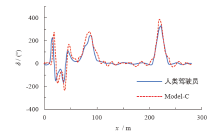
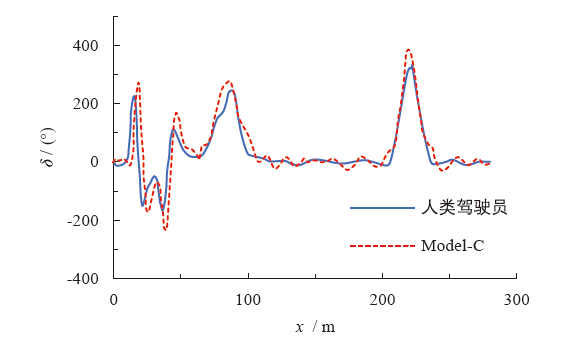
提出了一种基于多源传感器与导航地图的多端输入-单端输出(端到端)自动驾驶决策控制模型,以弥补现有端到端自动驾驶方法中基于深度神经网络(DNN)的PilotNet模型在主动避障行驶和交叉路口通行方面的不足。该模型的传感器数据输入端包括:单目前视摄像头、360( ° )多线激光雷达(LiDAR)所得二维俯视图、精准定位的局部导航地图等3部分;车辆控制命令输出端为方向盘转向角。进行了多工况仿真和实车试验。结果表明:与PilotNet模型相比,该模型的方向盘转向角均方根误差(RMSE)值下降了37%;因而,该模型具备主动避障和交叉路口通行的能力。
中图分类号:
朱波, 张纪伟, 谈东奎, 胡旭东. 基于多源传感器与导航地图的端到端自动驾驶方法[J]. 汽车安全与节能学报, 2022, 13(4): 738-749.
ZHU Bo, ZHANG Jiwei, TAN Dongkui, HU Xudong. End-to-end autonomous driving method based on multi-source sensor and navigation map[J]. Journal of Automotive Safety and Energy, 2022, 13(4): 738-749.
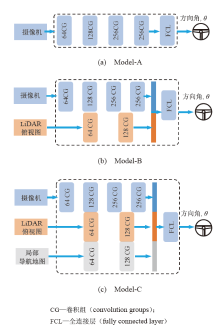
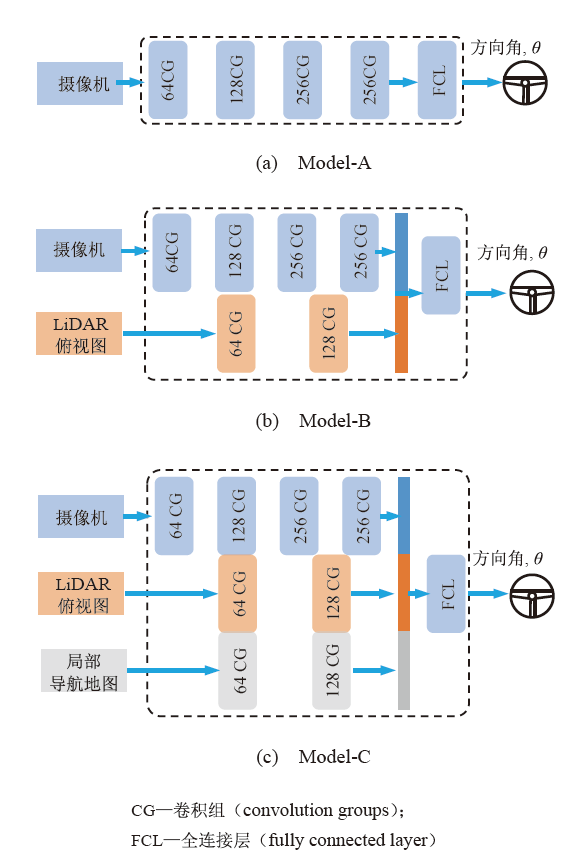




| 模型 | 输入数据 | t / ms | 车道保持功能 | 主动避障行驶 | 通过交叉路口 |
|---|---|---|---|---|---|
| PilotNet | 摄像头 | 3.9 | √ | × | × |
| Model-A | 摄像头 | 5.6 | √ | × | × |
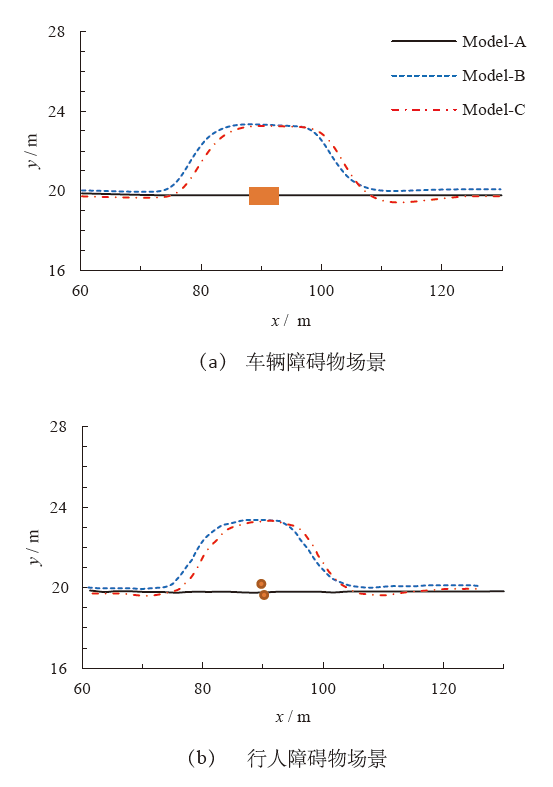
| Model-B | 摄像头 + LiDAR | 9.8 | √ | √ | × |
| Model-C | 摄像头 + LiDAR + 导航地图 | 12.7 | √ | √ | √ |
| 模型 | 输入数据 | t / ms | 车道保持功能 | 主动避障行驶 | 通过交叉路口 |
|---|---|---|---|---|---|
| PilotNet | 摄像头 | 3.9 | √ | × | × |
| Model-A | 摄像头 | 5.6 | √ | × | × |
| Model-B | 摄像头 + LiDAR | 9.8 | √ | √ | × |
| Model-C | 摄像头 + LiDAR + 导航地图 | 12.7 | √ | √ | √ |





| [1] | 陈颖. 自动驾驶技术研究现状及发展趋势[J]. 能源技术与管理, 2021, 46(3): 34-37. |
| CHEN Ying. Research status and development trend of automatic driving technology[J]. Energy Tech Manag, 2021, 46(3): 34-37. (in Chinese) | |
| [2] | Broggi A, Cerri P, Debattisti S, et al. PROUD Public road urban driverless-car test[J]. IEEE Trans Intell Transp Syst, 2015, 16(6): 3508-3519. |
| [3] | Bojarski M, Yeres P, Choromanska A, et al. Explaining how a deep neural network trained with end-to-end learning steers a car[EB/OL]. (2017-04-25), https://arxiv.org/abs/1704.07911. |
| [4] | WANG Tinghan, LUO Yugong, LIU Jinxin, et al. End-to-end self-driving approach independent of irrelevant roadside objects with auto-encoder[J]. IEEE Trans Intell Transp Syst, 2020, 23(1): 641-650. |
| [5] | Pomerleau D A. Alvinn: An autonomous land vehicle in a neural network[C]// Adva Neural Info Proc Syst. San Francisco: Morgan Kaufmann Publishers Inc, 1989: 305-313. |
| [6] | LeCun Y, Muller U, Ben J, et al. Off-road obstacle avoidance through end-to-end learning[C]// Int’l Conf Neural Info Proc Syst, Vancouver, 2005: 1-8. |
| [7] | Bojarski M, Testa D, Dworakowski D, et al. End to end learning for self-driving cars[EB/OL]. (2016-04-25), http://arxiv.org/abs/1604.07316. |
| [8] | XU Huazhe, GAO Yang, YU Fisher, et al. End-to-end learning of driving models from large-scale video datasets[C]// Proc IEEE Conf Computer Vision Pattern Recog, IEEE, Honolulu, 2017: 2174-2182. |
| [9] |
胡学敏, 童秀迟, 郭琳, 等. 基于深度视觉注意神经网络的端到端自动驾驶模型[J]. 计算机应用, 2020, 40(7): 1926-1931.
doi: 10.11772/j.issn.1001-9081.2019112054 |
| HU Xuemin, TONG Xiuchi, GUO Lin, et al. End-to-end autonomous driving model based on deep visual attention neural network[J]. Computer Appl, 2020, 40(7): 1926-1931. (in Chinese) | |
| [10] | Codevilla F, Mller M, Lpez A, et al. End-to-end driving via conditional imitation learning[C]// 2018 IEEE Int’l Conf Robo Automation (ICRA). Brisbane, 2018: 4693-4700. |
| [11] | Sallab A, Abdou M, Perot E, et al. Deep reinforcement learning framework for autonomous driving[J]. Electronic Imaging, 2017(19): 70-76. |
| [12] | CHEN Siyuan, WANG Meiling, SONG Wenjie, et al. Stabilization approaches for reinforcement learning-based end-to-end autonomous driving[J]. IEEE Trans Vehi Tech, 2020, 69(5): 4740-4750. |
| [13] | SONG Wenjie, LIU Shixian, LI Yujun, et al. Smooth actor-critic algorithm for end-to-end autonomous driving[C]// 2020 Ame Control Conf, ACC, Colorado: 2020: 3242-3248. |
| [14] | Abdou M, Kamal H, El-Tantawy S, et al. End-to-end deep conditional imitation learning for autonomous driving[C]// 2019 31st Int’l Conf Micro- Electronics (ICM), IEEE, Beijing, 2020: 346-350. |
| [15] | 卢宏涛, 张秦川. 深度卷积神经网络在计算机视觉中的应用研究综述[J]. 数据采集与处理, 2016, 31(1): 1-17. |
| LU Hongtao, ZHANG Qinchuan. A review of the application of deep convolutional neural networks in computer vision[J]. Data Acqu Proce, 2016, 31(1): 1-17. (in Chinese) | |
| [16] | Simonyan K, Zisserman A. Very deep convolutional networks for large-scale image recognition[EB/OL]. (2015-04-10), https://arxiv.org/abs/1409.1556. |
| [17] | Toth L. Phone recognition with deep sparse rectifier neural networks[C]// IEEE Acoustics Speech Signal Proc (ICASSP), IEEE, California: 2013: 6985-6989. |
| [18] | CHEN Zhilu, HUANG Xinming. End-to-end learning for lane keeping of self-driving cars[C]// 2017 IEEE Intell Vehi Symp (IV). IEEE, Los Angeles, 2017: 1856-1860. |
| [19] | Jhung J, Bae I, Moon J, et al. End-to-end steering controller with CNN-based closed-loop feedback for autonomous vehicles[C]// 2018 IEEE Intell Vehi Symp (IV). IEEE, Changshu, 2018: 617-622. |
| [20] | Mihalea A, Samoilescu R, Nica A, et al. End-to-end models for self-driving cars on UPB campus roads[C]// 2019 IEEE 15th Int’l Conf Intell Computer Commu Proc (ICCP). IEEE, Tokyo, 2019: 35-40. |
| [21] | YANG Zhengyuan, ZHANG Yixuan, YU Jerry, et al. End-to-end multi-modal multi-task vehicle control for self-driving cars with visual perceptions[C]// 2018 24th Int’l Conf Pattern Recog (ICPR). IEEE, Beijing, 2018: 2289-2294. |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 韩东明, 程思哲, 王金湘, 刘亚辉, 殷国栋. 混合交通下智能网联车辆预见性协同自适应巡航控制[J]. 汽车安全与节能学报, 2026, 17(1): 130-139. |
| [3] | 付雪青, 陈闯, 周道卿, 张岩, 曹晓琳, 李欣, 吉建波, 陈鹏, 薛兴旭, 李耀宗. 基于神经网络的火焰筒开孔直径对燃烧室燃烧性能影响的研究[J]. 汽车安全与节能学报, 2026, 17(1): 88-95. |
| [4] | 邱照玉, 祝小元, 田光宇, 殷国栋. 隐蔽网络攻击下智能网联汽车容错安全控制[J]. 汽车安全与节能学报, 2025, 16(6): 914-922. |
| [5] | 程泽阳, 段奕阳, 杨蒙蒙, 冯忠祥, 王鹤, 朱晓俊, 保丽霞. 基于混合神经网络的交织区危险驾驶与风格的识别[J]. 汽车安全与节能学报, 2025, 16(5): 688-697. |
| [6] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [7] | 王琳, 陈清华, 业红玲, 王鹏飞, 徐驰, 钱爱文. 基于神经网络自适应MPC智能车辆轨迹跟踪仿真[J]. 汽车安全与节能学报, 2025, 16(4): 638-647. |
| [8] | 房熙博, 宁一高, 赵轩, 周猛. 基于SQP和GRNN的商用客车动力学参数自适应辨识[J]. 汽车安全与节能学报, 2025, 16(4): 648-656. |
| [9] | 虞安军, 励英迪, 杨哲懿, 付崇宇, 童蔚苹, 余佳, 刘云海, 刘志远. 基于多维注意力机制的高速公路交通流量预测方法[J]. 汽车安全与节能学报, 2025, 16(3): 463-469. |
| [10] | 荣海, 蒋建中, 姚再起, 马凯, 杜柯南. 基于神经网络代理模型的车身多学科轻量化优化设计[J]. 汽车安全与节能学报, 2025, 16(1): 32-42. |
| [11] | 张立成, 押境田, 彭琨, 杨冉. 车辆急动度对神经网络油耗预测性能影响研究[J]. 汽车安全与节能学报, 2025, 16(1): 117-126. |
| [12] | 高凯, 刘健, 刘林鸿, 刘欣宇, 张金来, 杜荣华. 基于LSTM-多头混合注意力的可解释换道意图预测[J]. 汽车安全与节能学报, 2024, 15(5): 763-773. |
| [13] | 张晨, 刘畅, 赵津, 王广玮, 许庆. 基于多尺度注意力机制的实时激光雷达点云语义的分割[J]. 汽车安全与节能学报, 2024, 15(4): 591-601. |
| [14] | 王居闯, 曹清林, 邱睿, 宋刘伟, 郭平安, 赵港. 在侧面碰撞中电动汽车电池模块破损的预测[J]. 汽车安全与节能学报, 2024, 15(2): 169-177. |
| [15] | 魏孟, 王桥, 叶敏, 廉高棨, 徐信芯. 基于dropout-MC递归神经网络的锂电池剩余寿命预测[J]. 汽车安全与节能学报, 2022, 13(3): 541-549. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||