欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2021, Vol. 12 ›› Issue (4): 528-539.DOI: 10.3969/j.issn.1674-8484.2021.04.012
李耀华1( ), 范吉康1, 刘洋2, 何杰2, 李泽田1, 潘绍飞1
), 范吉康1, 刘洋2, 何杰2, 李泽田1, 潘绍飞1
收稿日期:2021-06-14
出版日期:2021-12-31
发布日期:2022-01-10
作者简介:李耀华(1980—),男(汉),陕西,副教授。E-mail: nuaaliyaohua@126.com。
基金资助:
LI Yaohua1(), FAN Jikang1, LIU Yang2, HE Jie2, LI Zetian1, PAN Shaofei1
Received:2021-06-14
Online:2021-12-31
Published:2022-01-10
摘要:
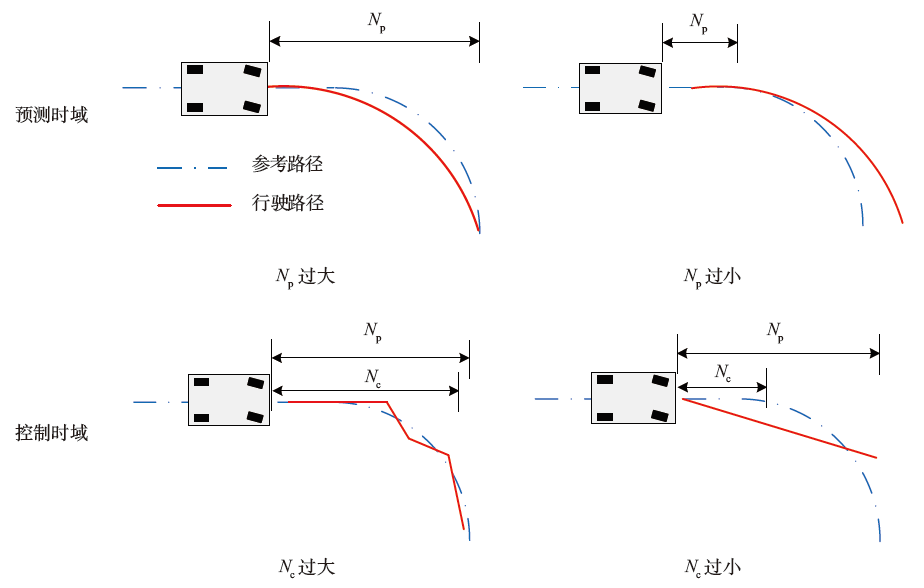
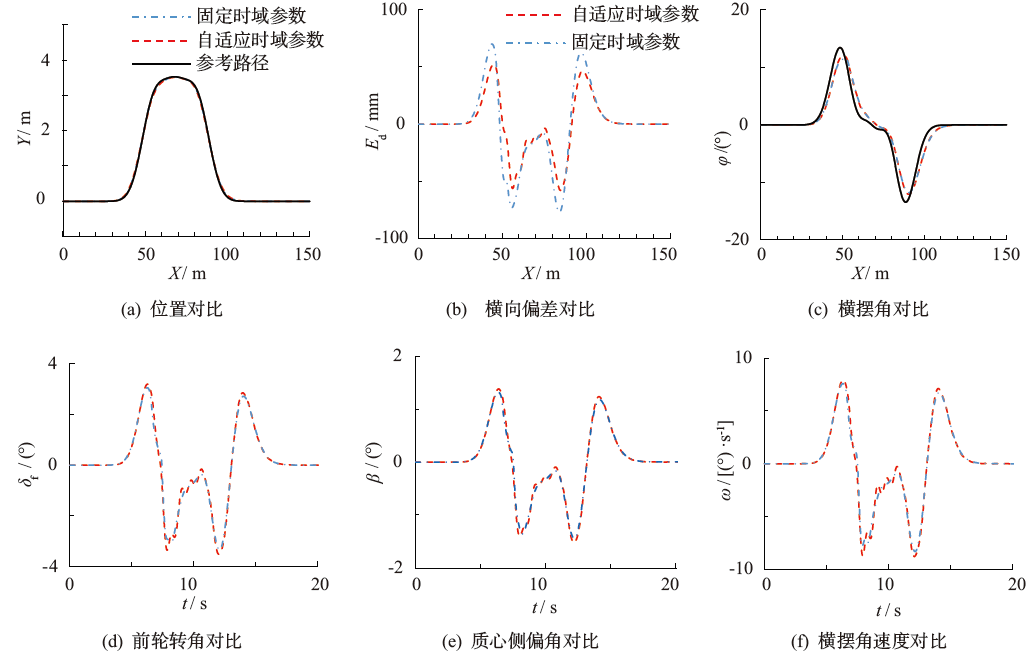
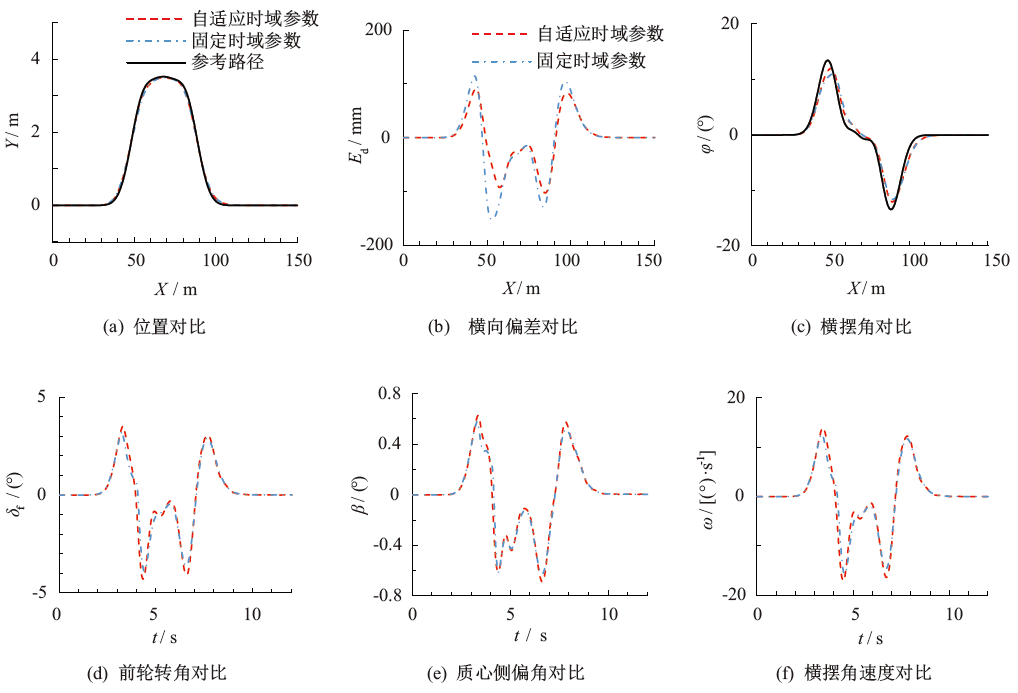
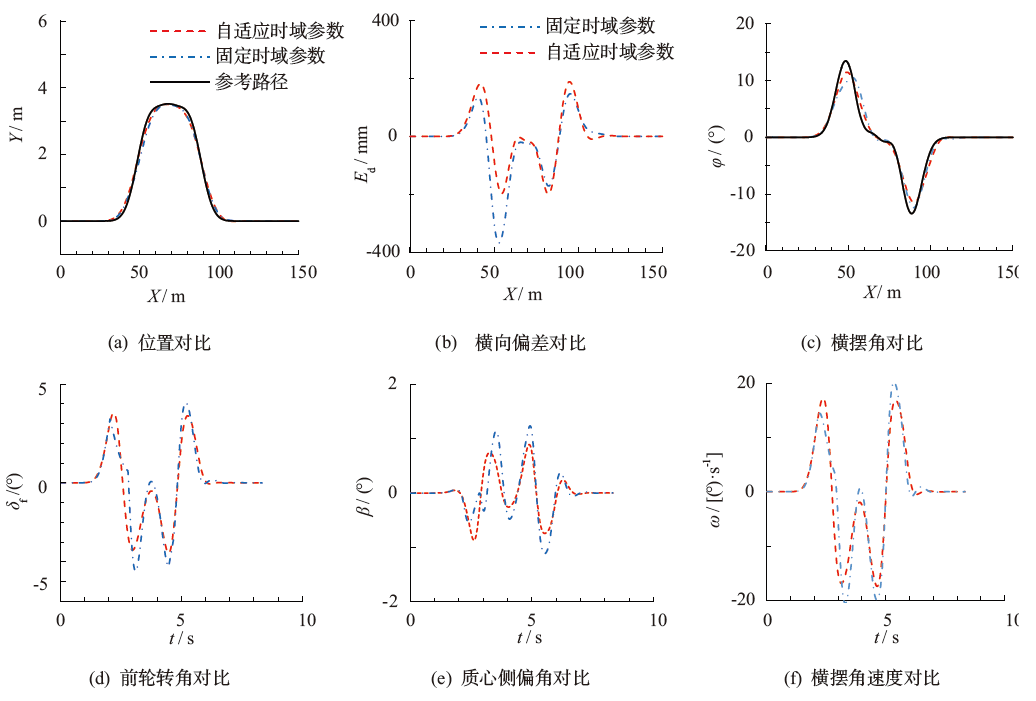
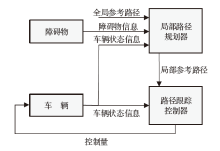
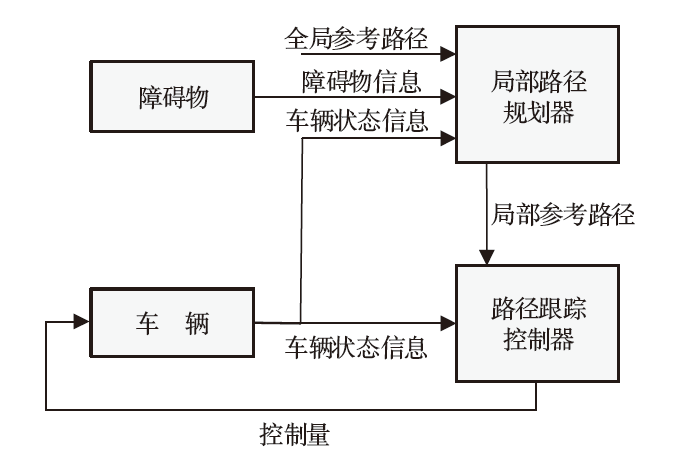
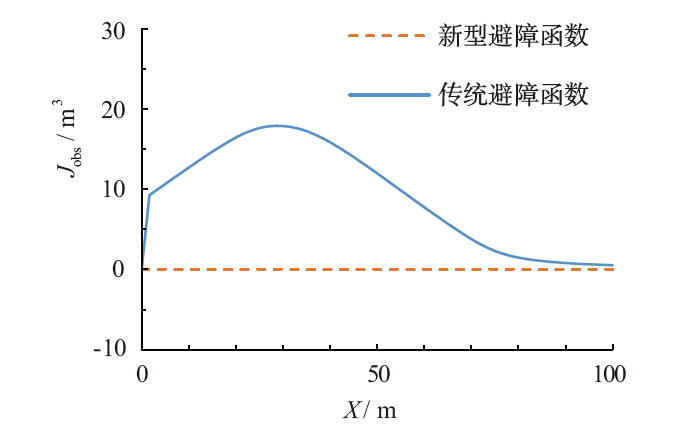
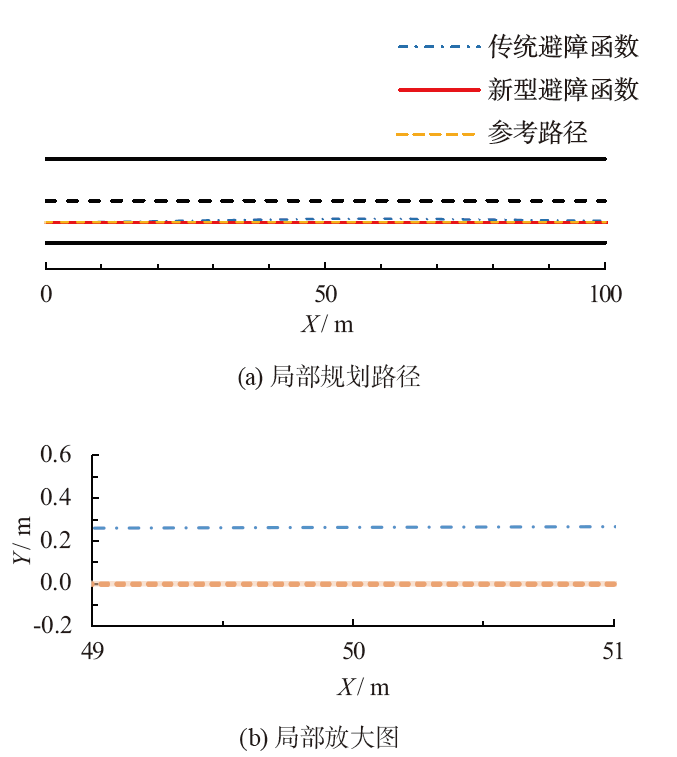
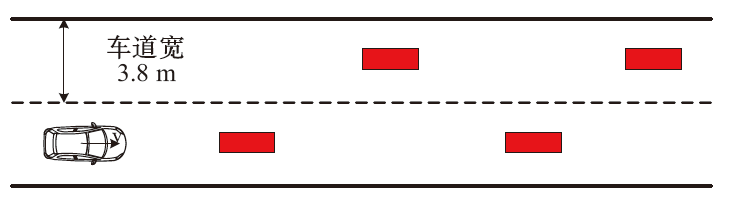
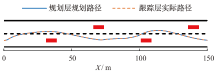
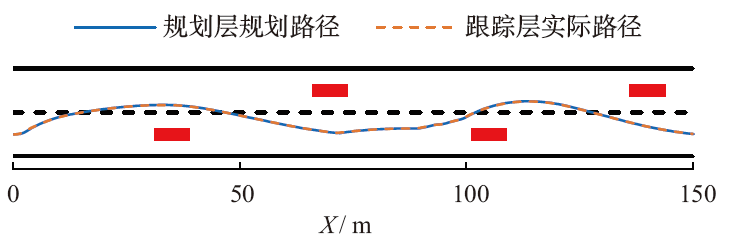
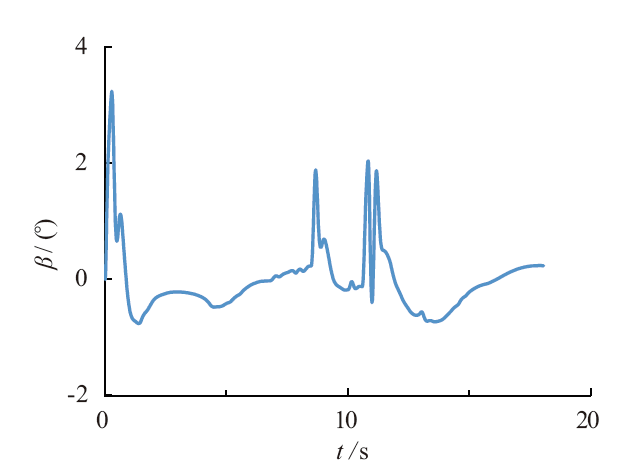
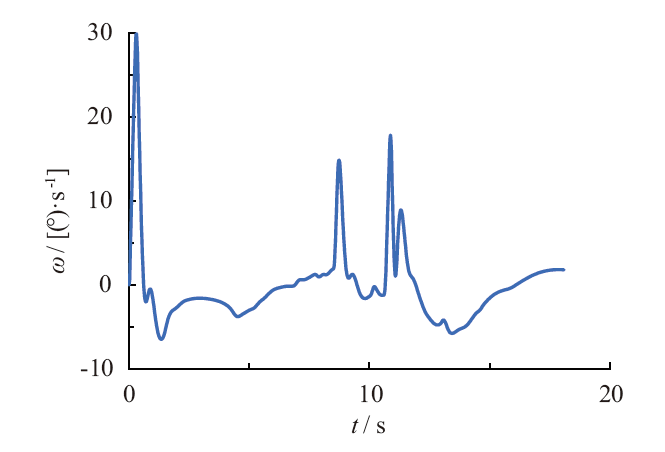
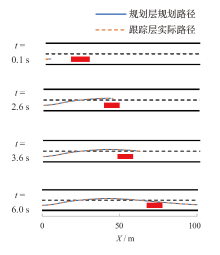
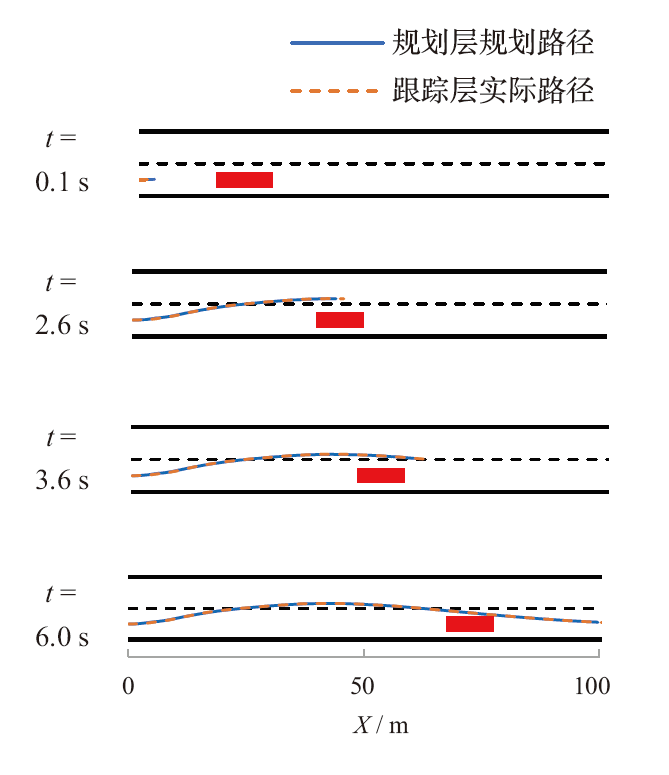
为解决过度避障,基于车辆点质量模型,采用非线性模型预测控制(MPC)算法,设计了新型避障功能函数,建立自动驾驶车辆路径跟踪性能综合评价指标,得到最优预测时域和控制时域参数,设计自适应双时域MPC参数路径跟踪控制器。搭建规划层和控制层集成的联合仿真平台,进行仿真试验。结果表明:在180个障碍物点下,避障功能函数可避免过度避障,且计算时间仅增加0.294 ms。采用局部避障路径规划与路径跟踪控制集成结构时,在多静态障碍物场景与动态障碍物场景下,车速为65 km/h时,最大横向误差偏差减小0.169 m,最大横摆角速度减小3.196 (°)/s。
中图分类号:
李耀华, 范吉康, 刘洋, 何杰, 李泽田, 潘绍飞. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4): 528-539.
LI Yaohua, FAN Jikang, LIU Yang, HE Jie, LI Zetian, PAN Shaofei. Path planning and path tracking control for autonomous vehicle based on MPC with adaptive dual-horizon-parameters[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 528-539.

| 整车质量,m | 1.723 t |
|---|---|
| 长×宽,L×B | 4.893 m × 1.862 m |
| 前轴到质心距离,a | 1.232 m |
| 后轴到质心距离,b | 1.468 m |
| 前轮侧偏刚度,Cf | 66.9 kN·rad-1 |
| 前轮侧偏刚度,Cr | 62.7 kN·rad-1 |
| 绕z轴转动惯量,Iz | 3 234 t·m2 |
| 整车质量,m | 1.723 t |
|---|---|
| 长×宽,L×B | 4.893 m × 1.862 m |
| 前轴到质心距离,a | 1.232 m |
| 后轴到质心距离,b | 1.468 m |
| 前轮侧偏刚度,Cf | 66.9 kN·rad-1 |
| 前轮侧偏刚度,Cr | 62.7 kN·rad-1 |
| 绕z轴转动惯量,Iz | 3 234 t·m2 |
| v / (km﹒h-1) | Np | Nc | Edmax/mm | Edm/mm | Eφm/(°) | βmax/(°) | ωmax/ [(°)﹒s-1)] |
|---|---|---|---|---|---|---|---|
| 30 | 17 | 1 | 72 | 17 | 0.761 | 1.380 | 13.181 |
| 30 | 19 | 16 | 67 | 17 | 0.746 | 1.349 | 10.870 |
| 50 | 22 | 4 | 108 | 30 | 0.546 | 0.497 | 18.890 |
| 70 | 33 | 2 | 215 | 55 | 0.541 | 1.337 | 19.190 |
| 70 | 40 | 1 | 645 | 125 | 1.210 | 0.633 | 13.602 |
| v / (km﹒h-1) | Np | Nc | Edmax/mm | Edm/mm | Eφm/(°) | βmax/(°) | ωmax/ [(°)﹒s-1)] |
|---|---|---|---|---|---|---|---|
| 30 | 17 | 1 | 72 | 17 | 0.761 | 1.380 | 13.181 |
| 30 | 19 | 16 | 67 | 17 | 0.746 | 1.349 | 10.870 |
| 50 | 22 | 4 | 108 | 30 | 0.546 | 0.497 | 18.890 |
| 70 | 33 | 2 | 215 | 55 | 0.541 | 1.337 | 19.190 |
| 70 | 40 | 1 | 645 | 125 | 1.210 | 0.633 | 13.602 |
| v / (km﹒h-1) | Edmax / mm | Edm / mm | Eφm /(°) | βmax /(°) | ωmax / [(°)·s-1] | Sc | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 差值 | ||||||
| 25 | 77 | 58 | 20 | 15 | 0.808 | 0.783 | 1.444 | 1.523 | 8.3 | 8.8 | 93.0 | 87.9 | 5.1 | |||||
| 35 | 105 | 79 | 28 | 20 | 0.758 | 0.704 | 1.084 | 1.195 | 11.9 | 13.0 | 96.3 | 89.0 | 7.3 | |||||
| 45 | 153 | 103 | 37 | 27 | 0.703 | 0.612 | 0.628 | 0.688 | 15.7 | 17.1 | 101.7 | 86.9 | 14.8 | |||||
| 55 | 247 | 136 | 47 | 37 | 0.651 | 0.504 | 0.427 | 0.442 | 18.7 | 18.0 | 121.2 | 89.2 | 32.0 | |||||
| 65 | 368 | 199 | 57 | 50 | 0.621 | 0.526 | 1.235 | 0.891 | 20.6 | 17.4 | 166.6 | 116.2 | 50.4 | |||||
| v / (km﹒h-1) | Edmax / mm | Edm / mm | Eφm /(°) | βmax /(°) | ωmax / [(°)·s-1] | Sc | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 固定 | 自适应 | 差值 | ||||||
| 25 | 77 | 58 | 20 | 15 | 0.808 | 0.783 | 1.444 | 1.523 | 8.3 | 8.8 | 93.0 | 87.9 | 5.1 | |||||
| 35 | 105 | 79 | 28 | 20 | 0.758 | 0.704 | 1.084 | 1.195 | 11.9 | 13.0 | 96.3 | 89.0 | 7.3 | |||||
| 45 | 153 | 103 | 37 | 27 | 0.703 | 0.612 | 0.628 | 0.688 | 15.7 | 17.1 | 101.7 | 86.9 | 14.8 | |||||
| 55 | 247 | 136 | 47 | 37 | 0.651 | 0.504 | 0.427 | 0.442 | 18.7 | 18.0 | 121.2 | 89.2 | 32.0 | |||||
| 65 | 368 | 199 | 57 | 50 | 0.621 | 0.526 | 1.235 | 0.891 | 20.6 | 17.4 | 166.6 | 116.2 | 50.4 | |||||


| [1] | 陈无畏, 方玉杰, 魏振亚. 基于遗传算法优化的双向垂直泊车路径规划[J]. 汽车工程, 2017, 39(11):1325-1332. |
| CHEN Wuwei, FANG Yujie, WEI Zhenya. Path planning of two-direction vertical parking based on optimization with genetic algorithm[J]. Automotive Engineering, 2017, 39(11):1325-1332. (in Chinese) | |
| [2] | 朱冰, 韩嘉懿, 赵健, 等. 基于安全场改进RRT*算法的智能汽车路径规划方法[J]. 汽车工程, 2020, 42(9):1145-1150+1182. |
| ZHU Bing, HAN Jiayi, ZHAO Jian, et al. Path planning of two-direction vertical parking based on optimization with genetic algorithm[J]. Automotive Engineering, 2020, 42(9):1145-1150+1182. (in Chinese) | |
| [3] | 彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1):1-10. |
| PENG Xiaoyan, XIE Hao, HUANG Jing. Research on local path planning algorithm for unmanned vehicles[J]. Automotive Engineering, 2020, 42(1):1-10. (in Chinese) | |
| [4] | 熊璐, 杨兴, 卓桂荣, 等. 无人驾驶车辆的运动控制发展现状综述[J]. 机械工程学报, 2020, 56(10):127-143. |
| XIONG Lu, YANG Xing, ZHUO Guirong, et al. Review on motion control of autonomous vehicles[J]. J Mech Engineering, 2020, 56(10):127-143. (in Chinese) | |
| [5] | 陈慧岩, 陈舒平, 龚建伟. 智能汽车横向控制方法研究综述[J]. 兵工学报, 2017, 38(6):1203-1214. |
| CHEN Huiyan, CHEN Shuping, GONG Jianwei. A review on the research of lateral control for intelligent vehicles[J]. Acta Armamentarii, 2017, 38(6):1203-1214. (in Chinese) | |
| [6] | 郭景华, 李克强, 罗禹贡. 智能车辆运动控制研究综述[J]. 汽车安全与节能学报, 2016, 7(2):151-159. |
| GUO Jinghua, LI Keqiang, LUO Yugong. Review on the research of motion control for intelligent vehicles[J]. J Auto Safe Energy, 2016, 7(2):151-159. (in Chinese) | |
| [7] | 周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42(9):1151-1158. |
| ZHOU Wei, GUO Xuexun, PEI Xiaofei, et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42(9):1151-1158. (in Chinese) | |
| [8] | Jeon J, Cowlagi R, Peters S, et al. Optimal motion planning with the half-car dynamical model for autonomous high-speed driving[C]// 2013 IEEE Ame Control Conf (ACC), 2013: 188-193. |
| [9] | 刘新亮. 智能车辆高速公路换道行为控制技术研究[D]. 西安:长安大学, 2020. |
| LIU Xinliang. Research on control technology of intelligent vehicle expressway lane-changing behavior[D]. Xi'an: Chang'an University, 2020. (in Chinese) | |
| [10] | 张金炜, 王文扬, 郭蓬, 等. 基于蚁群四次贝塞尔曲线的无人车路径规划[J]. 现代电子技术, 2019, 42(13):113-116. |
| ZHANG Jinwei, WANG Wenyang, GUO Peng, et al. Unmanned vehicle path planning based on ant colony quartic Bezier curve[J]. Modern Elect Tech, 2019, 42(13):113-116. (in Chinese) | |
| [11] | 李军, 李古月. 基于改进人工势场的路径规划与跟踪控制[J]. 重庆交通大学学报(自然科学版), 2020, 39(09):25-30+37. |
| LI Jun, LI Guyue. Path planning and tracking control based on improved artificial potential field[J]. J Chongqing Jiaotong Univ (Nat Sci), 2020, 39(09):25-30+37. (in Chinese) | |
| [12] | WANG Zhuping, LI Gangbin, JIANG Houjie, et al. Collision-free navigation of autonomous vehicles using convex quadratic programming-based model predictive control[C]// IEEE/ ASME Trans Mechatronics, 2018, 23(3):1103-1113. |
| [13] |
Park M, Lee S, Han W. Development of steering control system for autonomous vehicle using geometry-based path tracking algorithm[J]. ETRI Journal, 2015, 37(3):617-625.
doi: 10.4218/etrij.15.0114.0123 URL |
| [14] |
黄海洋, 张建, 王宇, 等. 基于多点预瞄最优控制的智能车辆路径跟踪[J]. 汽车技术, 2018(10):6-9.
doi: 10.19620/j.cnki.1000-3703.20181035 |
| HUANG Haiyang, ZHANG Jian, WANG Yu, et al. Path traking for intelligent vehicle based on the optimal multipoint preview control[J]. Automobile Technology, 2018(10):6-9. (in Chinese) | |
| [15] | HANG Peng, LUO Fengmei, FANG Shude, et al. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control[C]// 2017 36th Chinese Control Conference (CCC), 2017: 9360-9366. |
| [16] | 李耀华, 刘洋, 冯乾隆, 等. 基于最优预瞄和模型预测的智能商用车路径跟踪控制[J]. 汽车安全与节能学报, 2020, 11(4):462-469. |
| LI Yaohua, LIU Yang, FENG Qianlong, et al. Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictive[J]. J Auto Safe Energy, 2020, 11(04):462-469. (in Chinese) | |
| [17] | 龚建伟, 刘凯, 齐建永. 无人驾驶车辆模型预测控制(第二版)[M]. 北京: 北京理工大学出版社, 2020:152-154. |
| GONG Jianwei, LIU Kai, QI Jianyong. Model predictive control for self-driving vehicles (2nd edition)[M]. Beijing: Beijing Institute of Technology Press, 2020: 152-154. (in Chinese) | |
| [18] | 田娥, 肖庆, 陆小佳, 等. 安全驾驶的横向安全预警报警阈值的确定[J]. 长安大学学报(自然科学版), 2012, 32(1):89-94. |
| TIAN E, XIAO Qing, LU Xiaojia, et al. Determination of alarm threshold in safe driving system with lateral warning[J]. J Chang’an Univ (Nat Sci Ed), 2012, 32(1):89-94. (in Chinese) | |
| [19] | 陈无畏, 刘翔宇, 黄鹤, 等. 考虑路面影响的车辆稳定性控制质心侧偏角动态边界控制[J]. 机械工程学报, 2012, 48(14):112-118. |
| CHEN Wuwei, LIU Xiangyu, HUANG He, et al. Research on side slip angle dynamic boundary control for vehicle stability control considering the impact of road surface[J]. J Mech Engineering, 2012, 48(14):112-118. (in Chinese) | |
| [20] | 孙银健. 基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究[D]. 北京:北京理工大学, 2015. |
| Sun Yinjian. Research on model predictive control-based trajectory tracking algorithm for unmanned vehicles[D]. Beijing: Beijing Institute of Technology, 2015. (in Chinese) | |
| [21] | 潘公宇, 张明梅. 高速转向工况下汽车操纵稳定性和平顺性研究[J]. 广西大学学报(自然科学版), 2016, 41(3):674-683. |
| PAN Gongyu, ZHANG Mingmei. Study on vehicle handling stability and ride performance at high speed steering condition[J]. J Guangxi Univ (Nat Sci Ed), 2016, 41(3):674-683. (in Chinese) |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [3] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [4] | 高超俊, 李祎承, 蔡英凤, 王海, 蒋金. 基于融合感知的自动驾驶汽车AEB控制研究[J]. 汽车安全与节能学报, 2025, 16(4): 629-637. |
| [5] | 王琳, 陈清华, 业红玲, 王鹏飞, 徐驰, 钱爱文. 基于神经网络自适应MPC智能车辆轨迹跟踪仿真[J]. 汽车安全与节能学报, 2025, 16(4): 638-647. |
| [6] | 张硕, 李潇, 陈轶嵩, 赵轩, 余强, 余曼. 智能车辆自适应轨迹跟踪控制方法研究[J]. 汽车安全与节能学报, 2025, 16(2): 303-314. |
| [7] | 张富椿, 尹燕莉, 马永娟, 肖杭洋, 陈海鑫, 余凯. 网联混合动力汽车队列的生态驾驶与能量管理分层控制[J]. 汽车安全与节能学报, 2025, 16(1): 159-169. |
| [8] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [9] | 尹燕莉, 王福振, 詹森, 黄学江, 张鑫新, 张富椿. 基于KL散度工况识别的混合动力汽车队列的分层控制[J]. 汽车安全与节能学报, 2024, 15(2): 242-252. |
| [10] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [11] | 赵崇钦, 景晖, 王刚, 冯焕秦, 刘夫云. 考虑参数估计的MPC算法的商用车车道保持控制[J]. 汽车安全与节能学报, 2024, 15(1): 129-136. |
| [12] | 朱波, 张纪伟, 谈东奎, 胡旭东. 基于多源传感器与导航地图的端到端自动驾驶方法[J]. 汽车安全与节能学报, 2022, 13(4): 738-749. |
| [13] | 李文礼, 肖凯文, 任勇鹏, 李超, 易帆. 行人过街场景下车辆避障路径规划与控制方法[J]. 汽车安全与节能学报, 2022, 13(3): 489-501. |
| [14] | 胡远志, 蒋涛, 刘西, 施友宁. 基于双流自适应图卷积神经网络的行人过街意图识别[J]. 汽车安全与节能学报, 2022, 13(2): 325-332. |
| [15] | 张平, 迟志诚, 陈一凡, 惠飞. 用于自动驾驶车辆的融合注意力机制多目标跟踪算法[J]. 汽车安全与节能学报, 2021, 12(4): 516-521. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||