欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (2): 181-196.DOI: 10.3969/j.issn.1674-8484.2025.02.001
• 综述与展望 • 下一篇
李国法1,2( ), 欧阳德霖2, 陈晨1, 聂冰冰1, 张伟3, 禹慧丽4, 刘斌5, 张强2,6, 王文军1, 成波1,3, 李升波1,*()
), 欧阳德霖2, 陈晨1, 聂冰冰1, 张伟3, 禹慧丽4, 刘斌5, 张强2,6, 王文军1, 成波1,3, 李升波1,*()
收稿日期:2024-12-05
修回日期:2025-01-27
出版日期:2025-04-30
发布日期:2025-04-22
通讯作者:
* 李升波,教授。E-mail:lisb@tsinghua.edu.cn。
作者简介:李国法(1986—),男(汉),河南,教授。E-mail:liguofa@cqu.edu.cn。基金资助:
LI Guofa1,2(), OUYANG Delin2, CHEN Chen1, NIE Binging1, ZHANG Wei3, YU Huili4, Liu Bin5, ZHANG Qiang2,6, WANG Wenjun1, CHENG Bo1,3, LI Shengbo1,*()
Received:2024-12-05
Revised:2025-01-27
Online:2025-04-30
Published:2025-04-22
摘要:
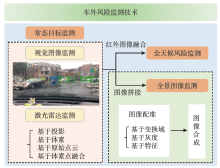
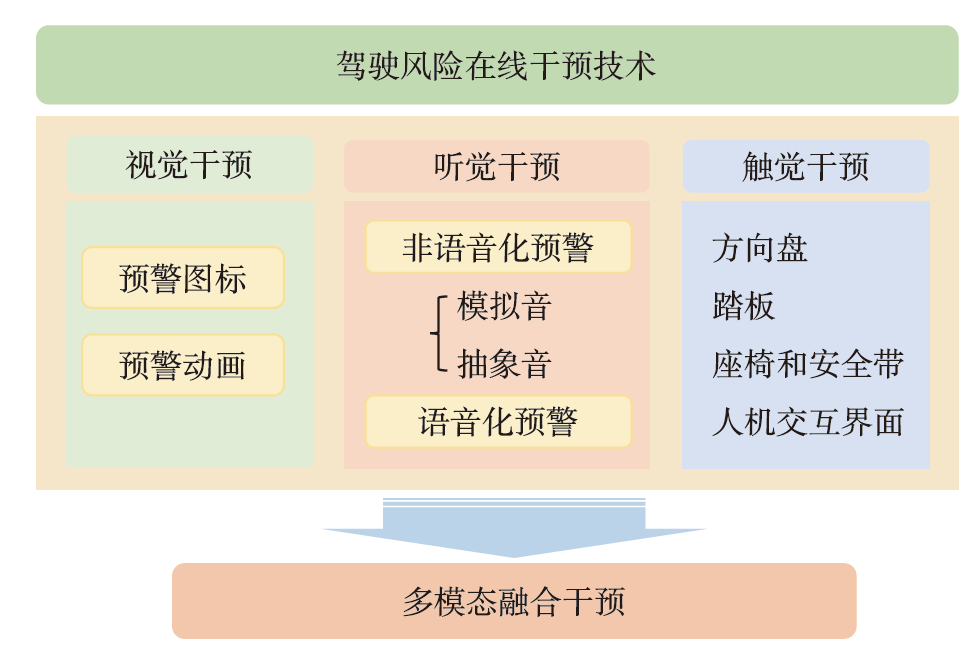
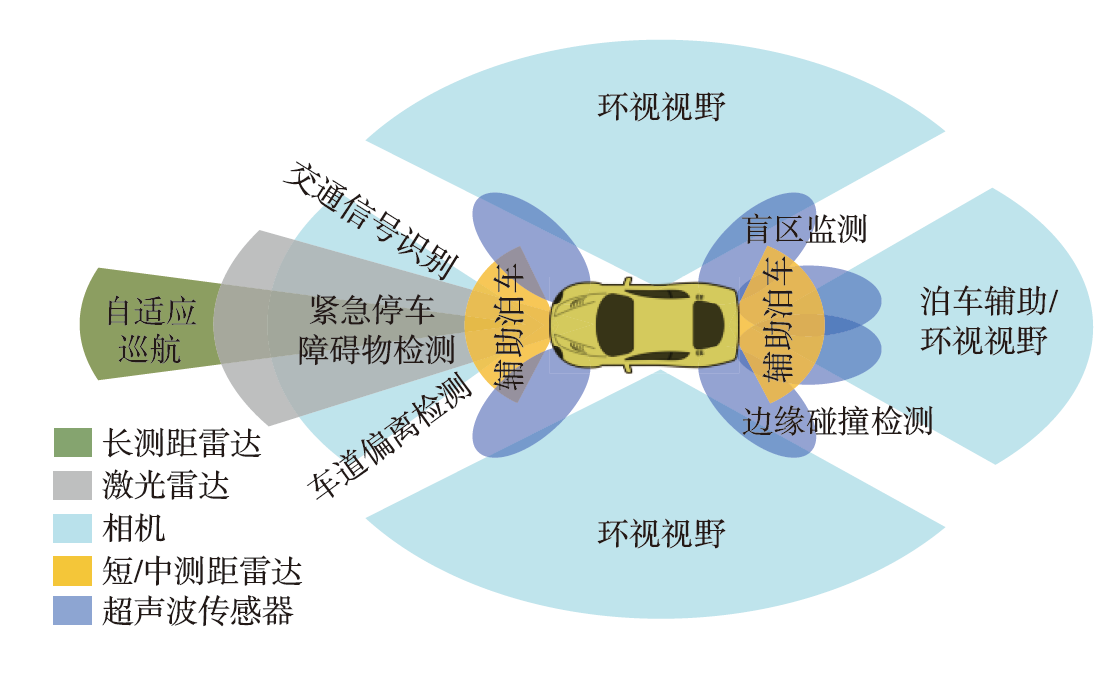
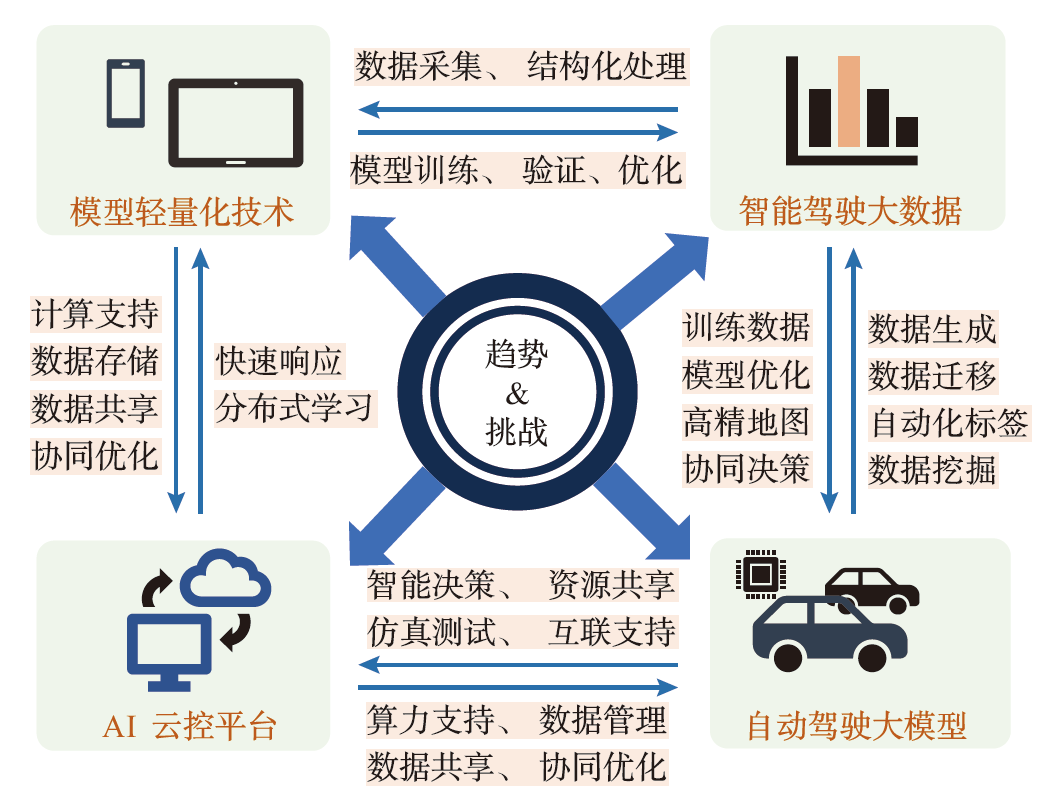
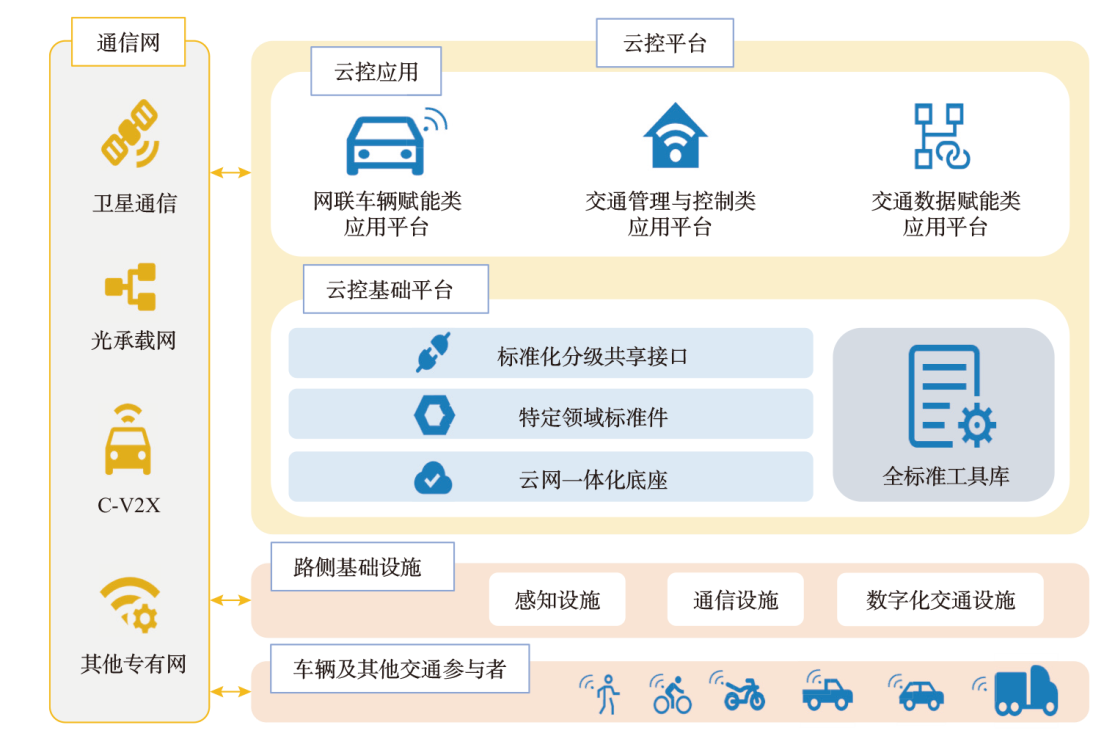
安全是道路交通运输一直以来的热点问题,是保障中国道路交通运输通畅、支持国民经济健康发展的重要基础。驾驶风险监测与干预是保障车辆驾驶安全的关键技术,特别是感知技术和信息技术的快速发展,为驾驶风险的监测和干预提供了坚实的数据基础和新的应用路径。该文针对驾驶风险监测与干预技术的研究进展进行系统性的综述。首先,从车内和车外两个角度对驾驶风险监测技术发展现状进行了梳理;其次,从离线和在线两方面对驾驶风险干预策略方案进行了综述,研究表明视听触觉融合干预有效提高驾驶员响应时间,触觉预警系统则能帮助降低驾驶员误操作率;在此基础上,介绍风险监测与干预技术在高级驾驶辅助系统(ADAS)、自动驾驶系统、车联网与车辆保险等方面的实际落地方向与具体应用,研究表明基于车路云协同的智能系统可提升风险预警实时性,ADAS的应用能有效降低交通事故率和基于用户使用情况的保险(UBI)损失率;最后,面向未来自动驾驶应用,从模型轻量化、大数据应用、云控平台和自动驾驶大模型等方面探讨了未来风险监测与干预技术的发展方向。
中图分类号:
李国法, 欧阳德霖, 陈晨, 聂冰冰, 张伟, 禹慧丽, 刘斌, 张强, 王文军, 成波, 李升波. 驾驶风险监测与干预技术研究综述[J]. 汽车安全与节能学报, 2025, 16(2): 181-196.
LI Guofa, OUYANG Delin, CHEN Chen, NIE Binging, ZHANG Wei, YU Huili, Liu Bin, ZHANG Qiang, WANG Wenjun, CHENG Bo, LI Shengbo. Review on driving risk monitoring and intervention technologies[J]. Journal of Automotive Safety and Energy, 2025, 16(2): 181-196.
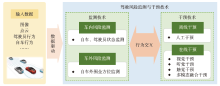
| 监测范围 | 技术手段 | 关键要点 |
|---|---|---|
| 车内风 险监测 | 基于驾驶行为/车辆状态的监测识别 | 建立车辆数据和驾驶员状态的有效链接 |
| 基于驾驶员头/脸部状态的监测识别 | 驾驶员行为特征提取及驾驶意图识别 | |
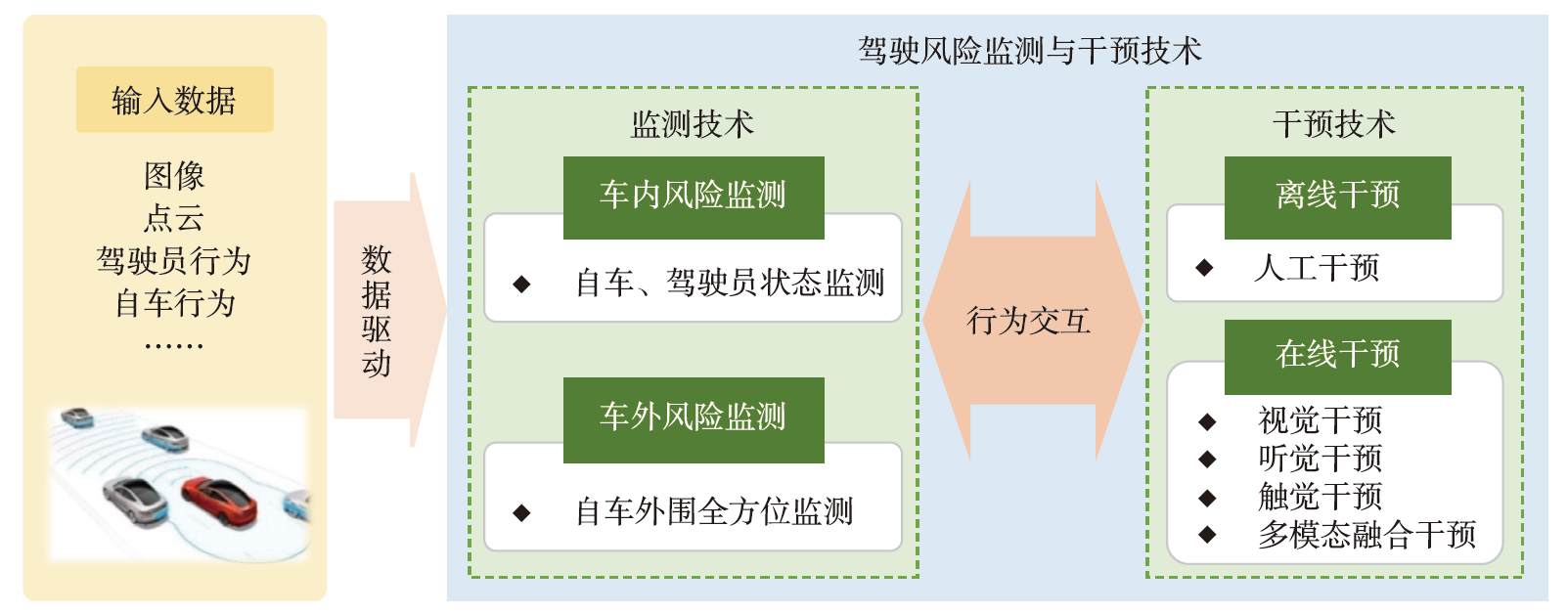
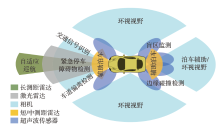
| 车外风 险监测 | 道路障碍物目标监测 | 基于图像目标检测、基于激光雷达目标检测 |
| 全天候风险监测 | 可见光图像与红外图像融合目标识别 | |
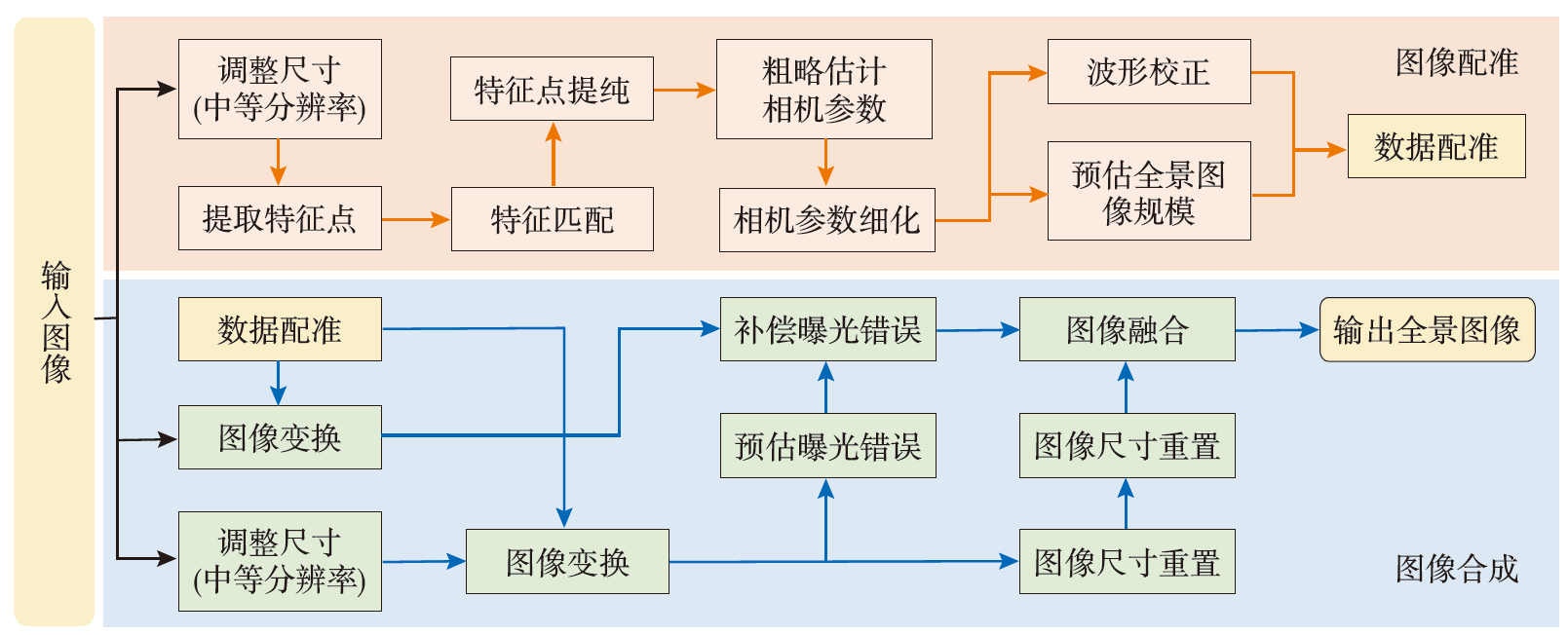
| 全景风险监测 | 多视角图像拼接 |
| 监测范围 | 技术手段 | 关键要点 |
|---|---|---|
| 车内风 险监测 | 基于驾驶行为/车辆状态的监测识别 | 建立车辆数据和驾驶员状态的有效链接 |
| 基于驾驶员头/脸部状态的监测识别 | 驾驶员行为特征提取及驾驶意图识别 | |
| 车外风 险监测 | 道路障碍物目标监测 | 基于图像目标检测、基于激光雷达目标检测 |
| 全天候风险监测 | 可见光图像与红外图像融合目标识别 | |
| 全景风险监测 | 多视角图像拼接 |
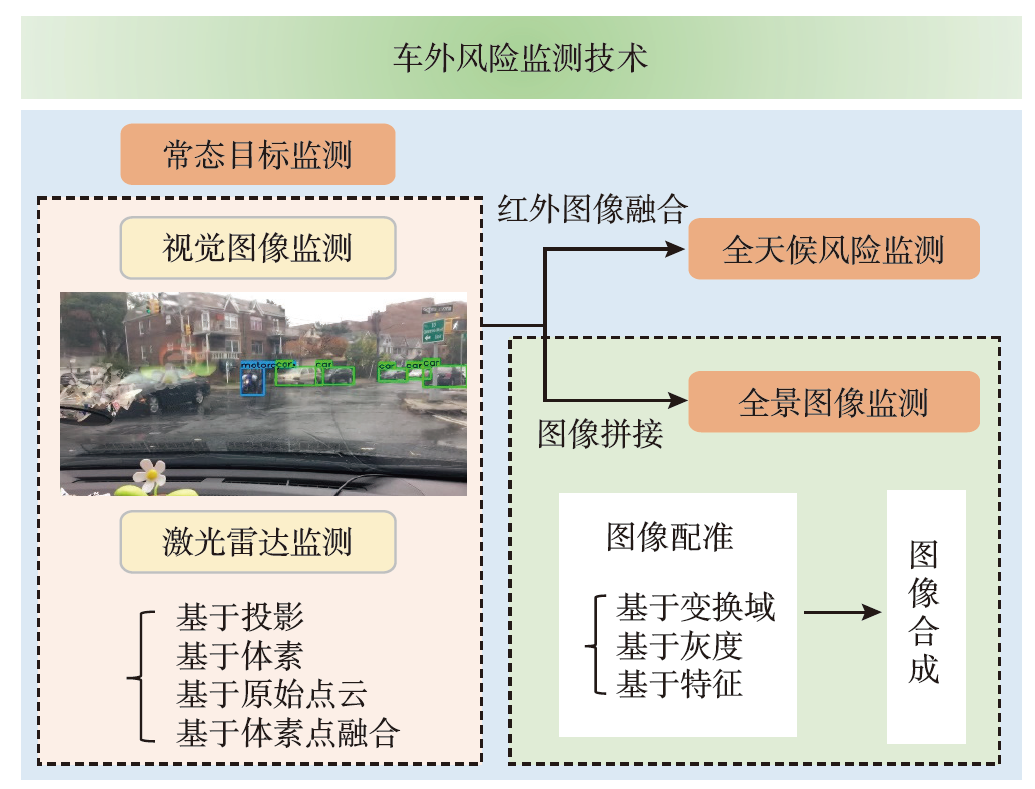
| 检测方法 | 技术目标 | 关键要点 | 相关方法模型 |
|---|---|---|---|
| 基于投影的方法 | 基于CNN实现三位点云特征提取 | 将三维点云转换为二维图像 | PIXOR [ |
| 基于体素的方法 | 将点云离散化为体素化网格输入 | Voxelnet [ | |
| 基于原始点云的方法 | 保留原始点云数据精确的位置和几何信息 | 原始点云关键点数据筛选与特征提取 | PointRCNN [ |
| 基于体素点融合的方法 | 结合体素和原始点云进行联合3D物体检测 | 结合体素和原始点云两者的优点 | RCNN [ |
| 检测方法 | 技术目标 | 关键要点 | 相关方法模型 |
|---|---|---|---|
| 基于投影的方法 | 基于CNN实现三位点云特征提取 | 将三维点云转换为二维图像 | PIXOR [ |
| 基于体素的方法 | 将点云离散化为体素化网格输入 | Voxelnet [ | |
| 基于原始点云的方法 | 保留原始点云数据精确的位置和几何信息 | 原始点云关键点数据筛选与特征提取 | PointRCNN [ |
| 基于体素点融合的方法 | 结合体素和原始点云进行联合3D物体检测 | 结合体素和原始点云两者的优点 | RCNN [ |


| [1] | WHO Team. Global status report on road safety 2023[R/OL]. World Health Organization, 2023. [2023-12-13] https://www.who.int/publications/i/item/9789240086517. |
| [2] | WANG Xuesong, XU Rongjiao, ZHANG Siyang, et al. Driver distraction detection based on vehicle dynamics using naturalistic driving data[J]. Transport Res Part C: Emerg Tech, 2022, 136: 103561-103561. |
| [3] | Jaydarifard S, Behara K, Baker D, et al. Driver fatigue in taxi, ride-hailing, and ridesharing services: A systematic review[J]. Transport Rev, 2024, 44(3): 572-590. |
| [4] | LYU Hongguang, YUE Jingwen, ZHANG Wenjun, et al. Fatigue detection for ship OOWs based on input data features, from the perspective of comparison with vehicle drivers: A review[J]. IEEE Sens J, 2023, 23(14): 15239-15252. |
| [5] | LI Guofa, YUAN Yufei, OUYANG Delin, et al. Driver distraction from the EEG perspective: A review[J]. IEEE Sens J, 2024, 24(3): 2329-2349. |
| [6] | LI Shengbo Eben, WANG Zhitao, ZHENG Yang, et al. Synchronous and asynchronous parallel computation for large-scale optimal control of connected vehicles[J]. Transport Res Part C: Emerg Tech, 2020, 121: 102842-102842. |
| [7] | 张波, 王文军, 张伟, 等. 驾驶人眼睛局部区域定位算法[J]. 清华大学学报(自然科学版), 2014, 54(6): 756-762. |
| ZHANG Bo, WANG Wenjun, ZHANG Wei, et al. Driver's eye region location algorithm[J]. J Tsinghua Univ (Sci Tech), 2014, 54(6): 756-762. (in Chinese) | |
| [8] | 李升波, 关阳, 侯廉, 等. 深度神经网络的关键技术及其在自动驾驶领域的应用[J]. 汽车安全与节能学报, 2019, 10(2): 119-145. |
| LI Shengbo, GUAN Yang, HOU Lian, et al. Key technique of deep neural network and its applications in autonomous driving[J]. J Autom Safe Energ, 2019, 10(2): 119-145. (in Chinese) | |
| [9] | 李升波, 张航. 用于自动驾驶汽车的深度学习技术介绍[J]. 建设科技, 2022(1): 37-46. |
| LI Shengbo Eben, ZHANG Hang. Introduction to deep learning and its application on autonomous vehicles[J]. Construct Sci Tech, 2022(1): 37-46. (in Chinese) | |
| [10] | LI Guofa, YAN Weiquan, LI Shen, et al. A temporal-spatial deep learning approach for driver distraction detection based on EEG signals[J]. IEEE Trans Auto Sci Engi, 2021, 19(4): 2665-2677. |
| [11] |
程文冬, 付锐, 马勇, 等. 驾驶人在手机通话行为中的认知分心图像识别研究[J]. 中国公路学报, 2021, 34(5): 168-181.
doi: 10.19721/j.cnki.1001-7372.2021.05.016 |
| CHEN Wendong, FU Rui, MA Yong, et al. Research on driver’s cognitive distraction in mobile phone call behavior based on image recognition[J]. China J Highw Transport, 2021, 34(5): 168-81. (in Chinese) | |
| [12] | LI Guofa, WANG Guanglei, GUO Zizheng, et al. Domain adaptive driver distraction detection based on partial feature alignment and confusion-minimized classification[J]. IEEE Trans Intel Transport Syst, 2024, 25(9): 11227-11240. |
| [13] |
贺宜, 鲁曼可, 高嵩, 等. 基于MobileViT-CA模型的营运车辆驾驶人分心行为检测[J]. 中国公路学报, 2024, 37(1): 194-204.
doi: 10.19721/j.cnki.1001-7372.2024.01.016 |
| HE Yi, LU Man-ke, GAO Song, et al. Distracted behavior detection of commercial vehicle drivers based on the mobilevit-ca model[J]. China J Highw Transport, 2024, 37(1): 194-204. (in Chinese) | |
| [14] | Van de Sande K E, Uijlings J R, Gevers T, et al. Segmentation as selective search for object recognition[C]// 2011 Int’l Conf Comput Visi. Barcelona, Spain. IEEE, 2011: 1879-1886. |
| [15] | Dalal N, Triggs B. Histograms of oriented gradients for human detection [C]// 2005 IEEE Comput Soc Conf Comput Visi Patt Recog (CVPR'05). San Diego, CA, USA. IEEE, 2005: 886-893. |
| [16] | Felzenszwalb P, McAllester D, Ramanan D. A discriminatively trained, multiscale, deformable part model[C]// 2008 IEEE Conf Comput Visi Patt Recog. Anchorage, AK, USA. IEEE, 2008: 1-8. |
| [17] | Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation[C]// Proc IEEE Conf Comput Visi Patt Recog. Columbus, OH, USA. IEEE, 2014: 580-587. |
| [18] | Girshick R. Fast r-cnn[C] // Proc IEEE Conf Comput Visi Patt Recog. Santiago, Chile: IEEE, 2015: 1440-1448. |
| [19] | REN Shaoqing, HE Kaiming, Girshick R, et al. Faster R-CNN: Towards real-time object detection with region proposal networks[J]. IEEE Trans Patt Anal Mach Intel, 2016, 39(6): 1137-1149. |
| [20] | 罗来全, 李升波, 高洪波, 等. 用于图像目标检测的深度Q学习算法[C]// 2019第七届中国指挥控制大会论文集. 中国指挥与控制学会, 2019: 425-431. |
| LUO Laiquan, LI Shengbo Eben, GAO Hongbo, et al. Deep Q learning algorithm for object detection in images[C]// Proc 7th China Conf Command Contr 2019, 2019: 425-431. (in Chinese) | |
| [21] | LI Guofa, JI Zefeng, QU Xingda. Stepwise domain adaptation (SDA) for object detection in autonomous vehicles using an adaptive CenterNet[J]. IEEE Trans Intel Transport Syst, 2022, 23(10): 17729-17743. |
| [22] | YANG Bin, LUO Wenjie, Urtasun R. Pixor: Real-time 3d object detection from point clouds[C]// Proc IEEE Conf Comput Visi Patt Recog. Salt Lake City, Utah, USA: IEEE, 2018: 7652-7660. |
| [23] | Beltrán J, Guindel C, Moreno M F, et al. Birdnet: A 3D object detection framework from lidar information[C]// Int’l Conf Intel Transport Syst (ITSC). Orlando, America. IEEE, 2018: 3517-3523. |
| [24] | ZHOU Yin, Tuzel O. Voxelnet: End-to-end learning for point cloud based 3d object detection[C]// Proc IEEE Conf Comput Visi Patt Recog. Salt Lake City, UT, USA. IEEE, 2018: 4490-4499. |
| [25] | Lang A H, Vora S, Caesar H, et al. Pointpillars: Fast encoders for object detection from point clouds[C]// Proc IEEE/CVF Conf Comput Visi Patt Recog. Long Beach, CA, USA. IEEE, 2019: 12697-12705. |
| [26] | SHI Shaoshuai, WANG Xiaogang, LI Hongsheng. PointRCNN: 3d object proposal generation and detection from point cloud[C]// Proc IEEE Conf Comput Visi Patt Recog (CVPR). Long Beach, CA, America. IEEE, 2019: 770-779. |
| [27] | YANG Zetong, SUN Yanan, LIU Shu, et al. 3DSSD: Point-based 3D single stage object detector[C]// Proc IEEE Conf Comput Visi Patt Recog (CVPR). Seattle, WA, America. IEEE, 2020: 11040-11048. |
| [28] | SHI Shaoshuai, GUO Chaoxu, JIANG Li, et al. Pv-rcnn: Point-voxel feature set abstraction for 3d object detection[C]// Proc IEEE/CVF Conf Comput Visi Patt Recog. Seattle, WA, USA. IEEE, 2020: 10529-10538. |
| [29] | YE Maosheng, XU Shuangjie, CAO Tongyi. Hvnet: Hybrid voxel network for lidar based 3d object detection[C]// Proc IEEE/CVF Conf Comput Visi Patt Recog. Seattle, WA, USA. IEEE, 2020: 1631-1640. |
| [30] | Sindagi V A, ZHOU Yin, Tuzel O. Mvx-net:Multimodal voxelnet for 3d object detection [C]// 2019 Int’l Conf Robot Auto (ICRA). Montreal, QC, Canada. IEEE, 2019: 7276-7282. |
| [31] | QI Charles Ruizhongtai, SU Hao, MO Kaichun, et al. Pointnet: Deep learning on point sets for 3d classification and segmentation[C]// Proc IEEE Conf Comput Visi Patt Recog. Honolulu, HI, USA. IEEE, 2017: 652-660. |
| [32] | QI Charles Ruizhongtai, YI Li, SU Hao, et al. Pointnet++: Deep hierarchical feature learning on point sets in a metric space[J]. Advan Neur Info Proc Syst, 2017, 30: 5099-5108. |
| [33] | FENG Mingzheng, SU Jianbo. RGBT tracking: A comprehensive review[J]. Info Fusi, 2024, 10: 102492-102492. |
| [34] | SONG Kechen, ZHAO Ying, HUANG Liming, et al. RGB-T image analysis technology and application: A survey[J]. Engi Appl Artif Intel, 2023, 120: 105919-105919. |
| [35] | ZHANG Qiang, LIU Yi, Blum R S, et al. Sparse representation based multi-sensor image fusion for multi-focus and multi-modality images: A review[J]. Info Fusi, 2018, 40: 57-75. |
| [36] | Mitchell H B. Image Fusion: Theories, Techniques and Aapplications[M]. Berlin Heidelberg: Springer Science & Business Media, 2010: 107-122. |
| [37] | Pajares G,De La Cruz J M. A wavelet-based image fusion tutorial[J]. Patt Recog, 2004, 37(9): 1855-1872. |
| [38] | ZHAO Jufeng, CHEN Yueting, FENG Huajun, et al. Infrared image enhancement through saliency feature analysis based on multi-scale decomposition[J]. Infra Phys Tech, 2014, 62: 86-93. |
| [39] | ZHOU Heng, TIAN Chunna, ZHANG Zhenxi, et al. Position-aware relation learning for RGB-thermal salient object detection[J]. IEEE Trans Imag Proc, 2023, 32: 2593-2607. |
| [40] | LI Guofa, LIN Yongjie, OUYANG Delin, et al. A RGB-thermal image segmentation method based on parameter sharing and attention fusion for safe autonomous driving[J]. IEEE Trans Intel Transport Syst, 2024, 25(6): 5122-5137. |
| [41] | Porshnev S V. The calculation of the discrete fourier transformation from short samples in the presence of noise[J]. Measure Tech, 2005, 48(6): 623-628. |
| [42] | Chui H, Rangarajan A. A new point matching algorithm for non-rigid registration[J]. Comput Visi Imag Understand, 2003, 89(2-3): 114-141. |
| [43] | Caspi Y, Irani M. Spatio-temporal alignment of sequences[J]. IEEE Trans Patt Anal Mach Intel, 2002, 24(11): 1409-1424. |
| [44] | Armstrong K A, Watling C N, Davey J D. Deterrence of drug driving: The impact of the ACT drug driving legislation and detection techniques[J]. Transport Res Part F: Traff Psych Behav, 2018, 54: 138-147. |
| [45] | Zimring F E, Hawkins G, Vorenberg J. Deterrence: The legal threat in crime control[M]. Chicago: University of Chicago Press Chicago, 1973: 121-133. |
| [46] | Elvik R, Christensen P. The deterrent effect of increasing fixed penalties for traffic offences: The Norwegian experience[J]. J Safe Res, 2007, 38(6): 689-695. |
| [47] | Wege C, Will S, Victor T. Eye movement and brake reactions to real world brake-capacity forward collision warnings: A naturalistic driving study[J]. Accid Anal Prev, 2013, 58: 259-270. |
| [48] |
Chiang D P, Brooks A M, Weir D H. On the highway measures of driver glance behavior with an example automobile navigation system[J]. Appl Ergon, 2004, 35(3): 215-223.
pmid: 15145284 |
| [49] | Lundqvist L-M, Eriksson L. Age, cognitive load, and multimodal effects on driver response to directional warning[J]. Appl Ergon, 2019, 76: 147-154. |
| [50] | Fricke N, Thüring M. Complementary audio-visual collision warnings[C]// Proc Huma Fact Ergon Soc Annu Meet. Los Angeles, CA: SAGE Publications, 2009: 1815-1819. |
| [51] | Bakowski D L, Davis S T, Moroney W F. Reaction time and glance behavior of visually distracted drivers to an imminent forward collision as a function of training, auditory warning, and gender[J]. Proced Manufact, 2015, 3: 3238-3245. |
| [52] |
Belz S M, Robinson G S, Casali J G. A new class of auditory warning signals for complex systems: Auditory icons[J]. Human Factors, 1999, 41(4): 608-618.
pmid: 10774131 |
| [53] | Reinolsmann N, Alhajyaseen W, Brijs T, et al. Investigating the impact of a novel active gap metering signalization strategy on driver behavior at highway merging sections[J]. Transport Res Part F: Traff Psych Behav, 2021, 78: 42-57. |
| [54] | Cheng S Y, Doshi A, Trivedi M M. Active heads-up display based speed compliance aid for driver assistance: A novel interface and comparative experimental studies[C]// 2007 IEEE Intel Vehi Symp. Istanbul, Turkey. IEEE, 2007: 594-599. |
| [55] | Smith M, Gabbard J L, Burnett G, et al. Determining the impact of augmented reality graphic spatial location and motion on driver behaviors[J]. Appl Ergon, 2021, 96: 103510-103510. |
| [56] |
Graham R. Use of auditory icons as emergency warnings: evaluation within a vehicle collision avoidance application[J]. Ergonomics, 1999, 42(9): 1233-1248.
pmid: 10503056 |
| [57] | Porter M M, Irani P, Mondor T A. Effect of auditory road safety alerts on brake response times of younger and older male drivers: A simulator study[J]. Transport Res Record, 2008, 2069(1): 41-47. |
| [58] | Fung C-P, CHANG Shunhui, Hwang J-R, et al. The study on the influence of audio warning systems on driving performance using a driving simulator[C] // Proc 20th Int’l Tech Conf Enhan Safe Vehi. Lyon, 2007: 18-18. |
| [59] | Ho C, Spence C. Assessing the effectiveness of various auditory cues in capturing a driver's visual attention[J]. J Exper Psych: Appl, 2005, 11(3): 157-157. |
| [60] | Abbink D A, Cleij D, Mulder M, et al. The importance of including knowledge of neuromuscular behaviour in haptic shared control[C]// 2012 IEEE Int’l Conf Syst, Man, Cybern. Seoul, Korea: IEEE, 2012: 3350-3355. |
| [61] | Saito Y, Raksincharoensak P. Effect of risk-predictive haptic guidance in one-pedal driving mode[J]. Cognit,Tech Work, 2019, 21(4): 671-684. |
| [62] | Murata A, Doi T, Karwowski W. Effectiveness of tactile warning and voice command for enhancing safety of drivers [J]. IEEE Access, 2022, 10: 93854-93866. |
| [63] | Kung C-H, Hsieh T-C, Smith S. Usability study of multiple vibrotactile feedback stimuli in an entire virtual keyboard input[J]. Appl Ergon, 2021, 90: 103270-103270. |
| [64] | Campbell J L, Richard C M, Brown J L, et al. Crash warning system interfaces: human factors insights and lessons learned[J]. DOT HS, 2007, 810: 697-697. |
| [65] |
Aidman E, Chadunow C, Johnson K, et al. Real-time driver drowsiness feedback improves driver alertness and self-reported driving performance[J]. Accid Anal Prev, 2015, 81: 8-13.
doi: 10.1016/j.aap.2015.03.041 pmid: 25932964 |
| [66] | Fitzharris M, Liu S, Stephens A N, et al. The relative importance of real-time in-cab and external feedback in managing fatigue in real-world commercial transport operations[J]. Traff Inju Prev, 2017, 18(sup1): S71-S78. |
| [67] | Ayoob E M, Steinfeld A, Grace R. Identification of an “appropriate” drowsy driver detection interface for commercial vehicle operations[C]// Proc Huma Fact Ergon Soc Annu Meet. Los Angeles, CA: SAGE Publications, 2003: 1840-1844. |
| [68] | Lee J D, Hoffman J D, Hayes E. Collision warning design to mitigate driver distraction[C]// Proc SIGCHI Conf Huma fact Comput Syst. New York, NY, USA. Association for Computing Machinery, 2004: 65-72. |
| [69] | Brown S B. Effects of haptic and auditory warnings on driver intersection behavior and perception[D]. Blacksburg, Virginia: the Faculty of the Virginia Polytechnic Institute and State University, 2005. |
| [70] | Dangelmaier M, Marberger C. Human-machine interface for a hypovigilance warning system[J]. IFAC Proc Vol, 2003, 36(12): 111-116. |
| [71] | Azmi N, Rahman A M, Shirmohammadi S, et al. LBP-based driver fatigue monitoring system with the adoption of haptic warning scheme[C]// 2011 IEEE Int’l Conf Virtu Environ, Human-Comput Interface Measurem Syst Proc, Ottawa. IEEE, 2011: 1-4. |
| [72] | An S-h, Lee B-H, Shin D-R. A survey of intelligent transportation systems[C]// 2011 Third Int’l Conf Comput Intel, Commun Syst Network. Bali, Indonesia. IEEE, 2011: 332-337. |
| [73] | 唐金龙. 基于驾驶模拟器的ADAS-HIL虚拟测试平台开发与应用研究[D]. 西安: 长安大学, 2021. |
| TANG Jinlong. Research on development and application of adas-hil virtual test platform based on drivingsimulator[D]. Xi’an: Chang’an University, 2021. (in Chinese) | |
| [74] | Nidamanuri J, Nibhanupudi C, Assfalg R, et al. A progressive review: Emerging technologies for ADAS driven solutions[J]. IEEE Trans Intel Vehi, 2021, 7(2): 326-341. |
| [75] | 前瞻产业研究院. 2021年全球ADAS行业市场现状、竞争格局及发展前景分析[EB/OL]. (2021-08-18) https://bg.qianzhan.com/report/detail/300/210818-9eb84736.html. |
| China Institute with Professional Industry Research. Analysis of the global adas industry market status, competitive landscape, and development prospects in 2021[EB/OL]. (2021-08-18) https://bg.qianzhan.com/report/detail/300/210818-9eb84736.html. (in Chinese) | |
| [76] | Ortega J, Lengyel H, Szalay Z. Overtaking maneuver scenario building for autonomous vehicles with PreScan software[J]. Transport Engi, 2020, 2: 100029-100029. |
| [77] | Rosique F, Navarro P J, Fernández C, et al. A systematic review of perception system and simulators for autonomous vehicles research[J]. Sensors, 2019, 19(3): 648-648. |
| [78] | 亿欧智库. 2021中国智能电动汽车ADAS供应链现状研究报告[EB/OL]. (2021-11-29) https://www.iyiou.com/research/20211129928. (in Chinese) |
| EO Intelligence. Research report on the current status of ADAS supply chain for intelligent electric vehicles in china in 2021. [EB/OL]. (2021-11-29) https://www.iyiou.com/research/20211129928. | |
| [79] | 李升波, 占国建, 蒋宇轩, 等. 类脑学习型自动驾驶决控系统的关键技术[J]. 汽车工程, 2023, 45(9): 1499-1515. |
| LI Shengbo Eben, ZHAN Guojian, JIANG Yuxuan, et al. Key technologies of brain-inspired decision and control intelligence for autonomous driving systems[J]. Autom Engineering, 2023, 45(9): 1499-1515. (in Chinese) | |
| [80] | 李国法, 赖伟鉴, 廖源, 等. 邻车切入工况下前撞预警系统的驾驶人依赖特性[J]. 汽车安全与节能学报, 2020, 11(1): 36-43. |
| LI Guofa, LAI Weijian, LIAO Yuan, et al. Driver reliance characteristics on forward collision warning systems in adjacent vehicle cut-in situations[J]. J Autom Safe Energ, 2020, 11(1): 36-43. (in Chinese) | |
| [81] | Doi A, Butsuen T, Niibe T, et al. Development of a rear-end collision avoidance system with automatic brake control[J]. JSAE Rev, 1994, 15(4): 335-340. |
| [82] | CHEN Yuanlin, WANG Chongan. Vehicle safety distance warning system: A novel algorithm for vehicle safety distance calculating between moving cars[C]// 2007 IEEE 65th Vehi Tech Conf (VTC2007) Spring. Dublin, Ireland. IEEE, 2007: 2570-2574. |
| [83] | Scanlon J M, Sherony R, Gabler H C. Preliminary potential crash prevention estimates for an Intersection Advanced Driver Assistance System in straight crossing path crashes [C]// 2016 IEEE Intel Vehi Symp (IV). Gothenburg, Sweden. IEEE, 2016: 1135-1140. |
| [84] | Desai A V, Haque M A. Vigilance monitoring for operator safety: A simulation study on highway driving[J]. J Safe Res, 2006, 37(2): 139-147. |
| [85] | Bukman E, Galley L, Kuhn K-P, et al. Method and computer program for identification of inattentiveness by the driver of a vehicle [P]: U.S. Patent No 7 283 056. 2007-10-16. |
| [86] | Arumugam S, Bhargavi R. A survey on driving behavior analysis in usage based insurance using big data[J]. J Big Data, 2019, 6: 1-21. |
| [87] | 邵铖茵, 王媛媛. 借鉴美国经验发展中国特色UBI车险[J]. 上海保险, 2018(8): 48-53. |
| SHAO Chengyin, WANG Yuanyuan. Learn from the experience of the United States to develop Chinese style UBI car insurance[J]. Shanghai Insur Month, 2018(8): 48-53. (in Chinese) | |
| [88] | YE Xiuwen, WENG Dengqian, SHA Yuqing, et al. Analysis on pricing model of UBI autoinsurance in China from the perspective of big data[J]. Int’l J Front Soc, 2021, 3(2): 79-86. |
| [89] | 乔木. 大数据语境下UBI发展现状及趋势研究[J]. 现代商业, 2015(1): 53-54. |
| QIAO Mu. Research on the development status and trends of UBI in the context of big data[J]. Modern Business, 2015(1): 53-54. (in Chinese) | |
| [90] | 陆炜文. 汽车与保险的大数据应用需要顶层设计[J]. 上海保险, 2017(4): 26-31. |
| LU Weiwen. Application of big data in automobiles and insurance requires top-level design[J]. Shanghai Insur Month, 2018(8): 48-53. (in Chinese) | |
| [91] | 朱家禛. 车联网下UBI车险的数据告知和保护机制研究[J]. 金融监管研究, 2020(8): 102-114. |
| ZHU Jiazhen. Research on the data notification and protection mechanism of UBI under the background of internet of vehicle[J]. Finan Regul Res, 2018(8): 48-53. (in Chinese) | |
| [92] | XU Xiaowei, DING Yukun, HU Sharon Xiaobo, et al. Scaling for edge inference of deep neural networks[J]. Natu Elect, 2018, 1(4): 216-222. |
| [93] | Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection[C]// Proc IEEE Conf Comput Visi Patt Recog. Las Vegas, NV, USA. 2016: 779-788. |
| [94] | WANG Pan, LIU Jianzhong, ZHANG Yinbao, et al. A novel cargo ship detection and directional discrimination method for remote sensing image based on lightweight network[J]. J Marin Sci Engi, 2021, 9(9): 932-932. |
| [95] | 沈超. 基于汽车大数据的客户需求发现及产品优化配置研究[D]. 合肥: 合肥工业大学, 2019. |
| SHEN Chao. Research on customer requirements discovery and productoptimized configuration based on automobile big data[D]. Hefei: Hefei University of Technology, 2019. (in Chinese) | |
| [96] | Tselentis D I, Papadimitriou E. Driver profile and driving pattern recognition for road safety assessment: Main challenges and future directions[J]. IEEE Open J Intel Transport Syst, 2023, 4: 83-100. |
| [97] | 文高丽. W公司自动驾驶公交云控系统开发策略研究[D]. 长春: 吉林大学, 2023. |
| WEN Gaoli. Research on new product development strategy of W company’s autonomous driving cloud control[D]. Changchun: Jilin University, 2023. (in Chinese) |
| [1] | 文家燕, 邹海峰, 钟薇, 高博麟, 卢彦博. 融合人车博弈论的车路云一体化系统车速规划方法[J]. 汽车安全与节能学报, 2026, 17(2): 261-269. |
| [2] | 薛清元, 瞿珏, 王崴, 牛天林, 李幸. 基于信任理论的自动驾驶接管场景下HMI设计方法[J]. 汽车安全与节能学报, 2026, 17(2): 270-277. |
| [3] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [4] | 马腾, 马育林, 李祎承, 潘家保, 许述财. 面向自动驾驶功能通用检测的安全行车量化评价[J]. 汽车安全与节能学报, 2026, 17(1): 59-69. |
| [5] | 吴杭哲, 焦一洲, 刘洋, 钟薇, 王水河, 郭景华, 赵健. 自动驾驶车辆紧急避撞线性时变模型预测轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(6): 934-944. |
| [6] | 郑讯佳, 曹泽义, 陈星, 刘辉, 高建杰. 基于自适应预测时域MPC的轨迹跟踪控制[J]. 汽车安全与节能学报, 2025, 16(5): 773-783. |
| [7] | 潘玉恒, 任晨, 鲁维佳, 李洋. 基于双重池化注意力机制和竖直特征融合的DV-PointPillars三维目标检测模型[J]. 汽车安全与节能学报, 2025, 16(5): 793-801. |
| [8] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [9] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [10] | 胡志龙, 裴晓飞, 周洪龙, 魏炜冉. 基于风险敏感的自动驾驶汽车分层强化学习决策[J]. 汽车安全与节能学报, 2025, 16(2): 326-333. |
| [11] | 杨俊儒, 郑四发, 许述财, 田野, 孙剑, 孙川, 李浩然. 基于OnSite平台的自动泊车测评工具的研究与设计[J]. 汽车安全与节能学报, 2025, 16(2): 334-343. |
| [12] | 杨澜, 赵祥模, 王润民, 王振, 房山, 瞿广跃. 自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1): 1-15. |
| [13] | 李怡, 刘显贵, 唐耀红, 陈立沛, 陈洋睿, 游铭娴. 变曲率道路下自动驾驶小客车安全稳定跟踪控制策略[J]. 汽车安全与节能学报, 2025, 16(1): 136-147. |
| [14] | 刘擎超, 王瑞海, 蔡英凤, 王海, 陈龙. 基于CatBoost和SHAP的高级别自动驾驶车辆非预期停车冲突风险预测[J]. 汽车安全与节能学报, 2025, 16(1): 170-180. |
| [15] | 曹莉凌, 刘君丽, 金升烨, 曹守启, 周国峰. 面向自动驾驶的远程多维信息实时交互系统设计[J]. 汽车安全与节能学报, 2024, 15(6): 934-942. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||