欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (4): 480-487.DOI: 10.3969/j.issn.1674-8484.2023.04.010
黄鹏程1( ), 裴晓飞2, 周洪龙1, 陈词1,*()
), 裴晓飞2, 周洪龙1, 陈词1,*()
收稿日期:2023-03-03
修回日期:2023-06-29
出版日期:2023-08-31
发布日期:2023-08-31
通讯作者:
*陈词 (1984—),男(汉),湖北,讲师。E-mail:chenc1520@whut.edu.cn。
作者简介:黄鹏程 (1998—),男(汉),江西,硕士研究生。E-mail:468774606@qq.com。
基金资助:
HUANG Pengcheng1(), PEI Xiaofei2, ZHOU Honglong1, CHEN Ci1,*()
Received:2023-03-03
Revised:2023-06-29
Online:2023-08-31
Published:2023-08-31
摘要:
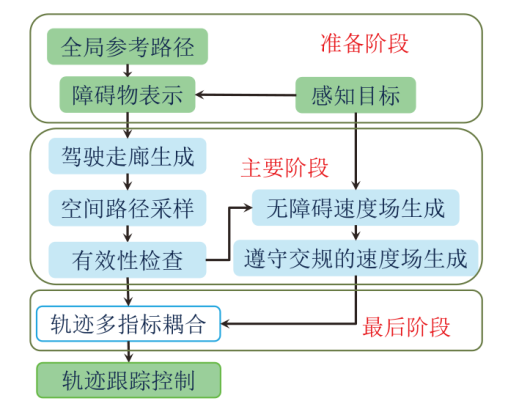
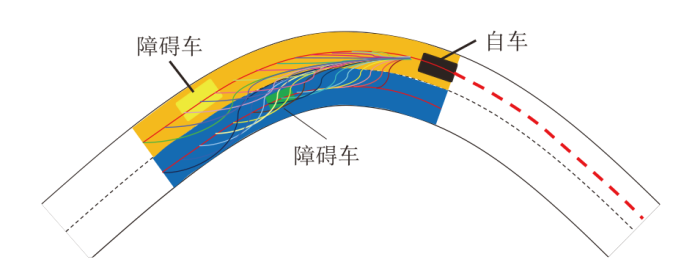
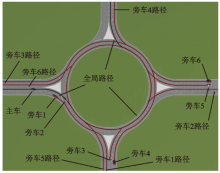
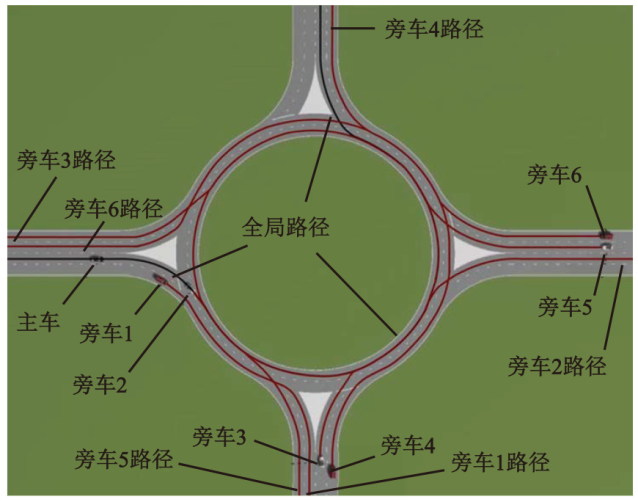
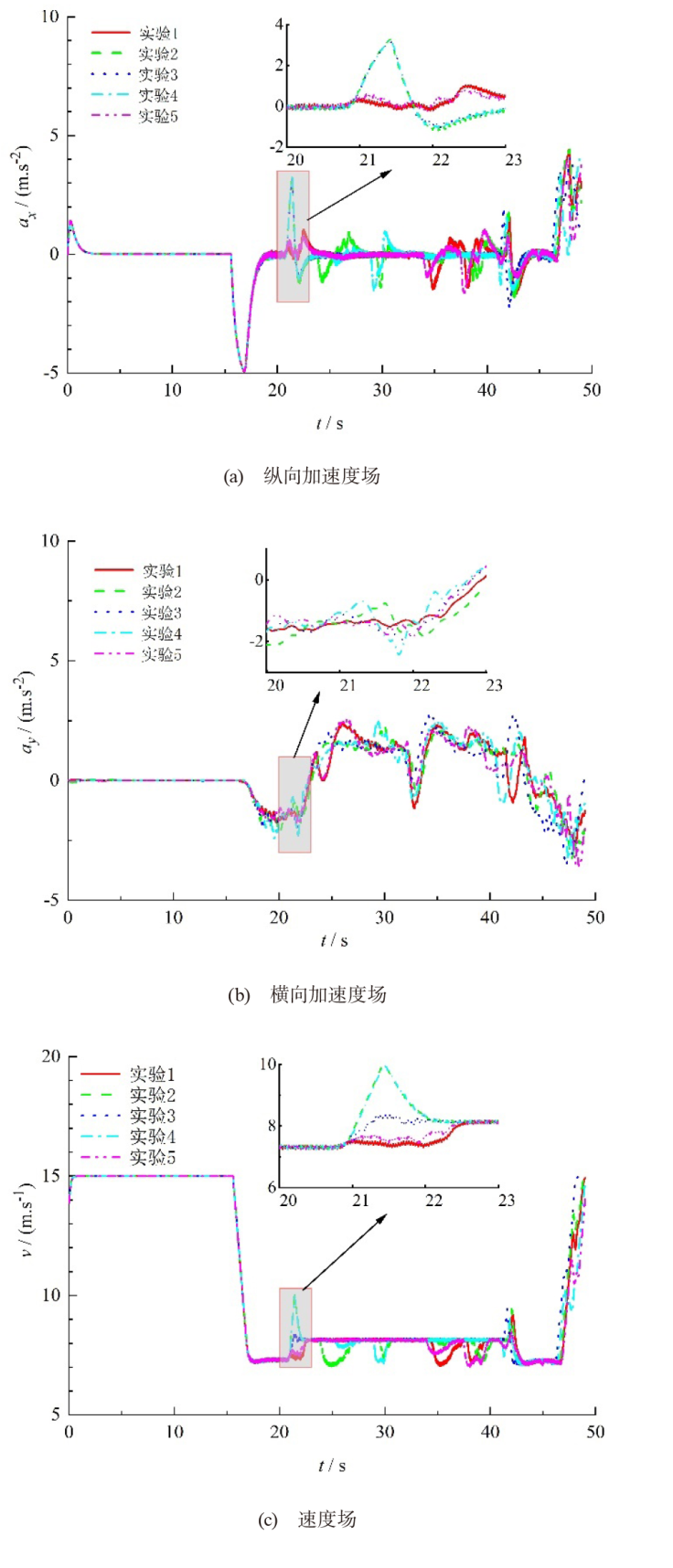
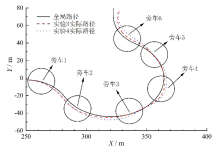
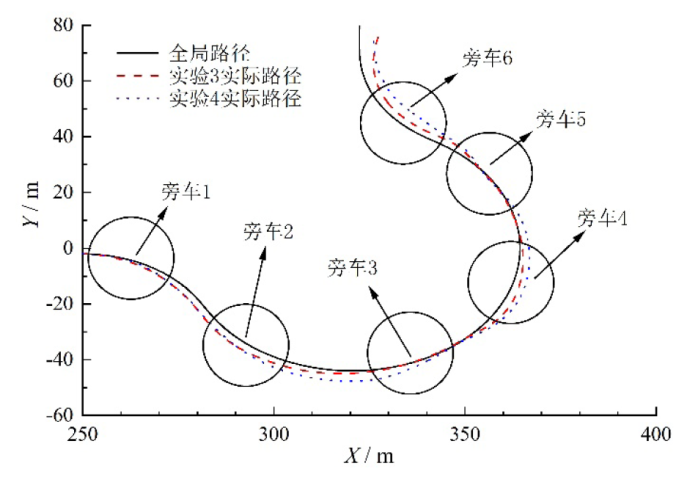
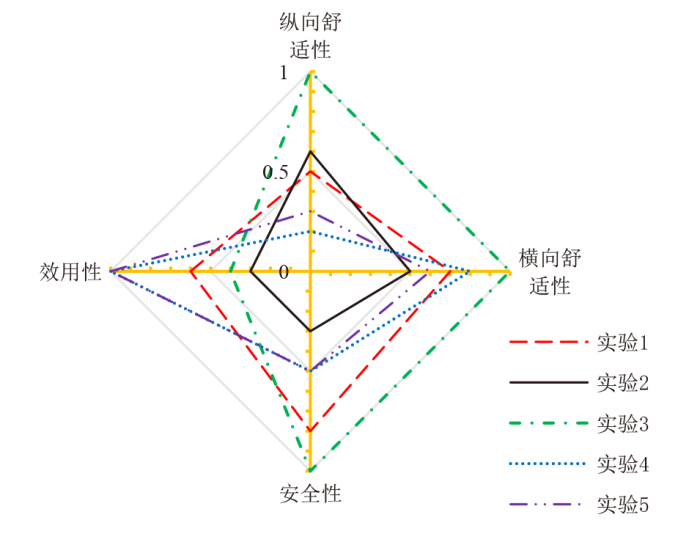
城市交通环境对自动驾驶汽车的安全性、舒适性、合规性、通行效率等指标提出了更高的要求。该文提出了一种时空耦合的实时轨迹规划方法,在其评价函数中引入上述多种量化指标。该算法在一组驾驶走廊内生成轨迹,根据结合横纵向舒适性、安全性和效用性的多指标评价函数选择最优轨迹,并在模拟环岛中进行了测试。结果表明:当舒适性优先时,加速度曲线较为平滑,最大值为0.66 m/s2; 当安全性优先时,产生的轨迹平均偏离0.19 m,避免与附近障碍物发生碰撞; 当效用性优先时,生成的轨迹最大速度为9.97 m/s,并表现出较积极的加速度场。该算法可使自动驾驶汽车在保持横纵向加速度的同时安全避开动态障碍物,且每次迭代平均耗费47.45 ms,满足实时性的要求。
中图分类号:
黄鹏程, 裴晓飞, 周洪龙, 陈词. 基于多指标耦合的自动驾驶汽车实时轨迹规划算法[J]. 汽车安全与节能学报, 2023, 14(4): 480-487.
HUANG Pengcheng, PEI Xiaofei, ZHOU Honglong, CHEN Ci. Trajectory planning algorithm of autonomous vehicle based on multi-index coupling[J]. Journal of Automotive Safety and Energy, 2023, 14(4): 480-487.

| 决策变量 | 轨迹性能指标 | 公式 |
|---|---|---|
| 纵向舒适性 | 纵向加速度平均值 | |
| 纵向加加速度平均值 | ||
| 横向舒适性 | 横向加速度平均值 | |
| 横向加加速度平均值 | ||
| 安全性 | 车道偏离距离 | |
| 效用性 | 正向纵向加速度 | |
| 平均速度 |
| 决策变量 | 轨迹性能指标 | 公式 |
|---|---|---|
| 纵向舒适性 | 纵向加速度平均值 | |
| 纵向加加速度平均值 | ||
| 横向舒适性 | 横向加速度平均值 | |
| 横向加加速度平均值 | ||
| 安全性 | 车道偏离距离 | |
| 效用性 | 正向纵向加速度 | |
| 平均速度 |
| 最大横向加速度,amax, y | 3.0 m/s2 |
| 最大纵向加速度,amax, x | 3.0 m/s2 |
| 最小纵向加速度,amin, x | -5.0 m/s2 |
| 最大限制速度,vlimit | 15.0 m/s |
| 最小跟车距离,dc | 10.0 m |
| 安全名义距离,do | 45.0 m |
| 最大制动加速度,amax,dec | -5.0 m/s2 |
| 最大速度,vmax | 15.0 m/s |
| 最大横向加速度,amax, y | 3.0 m/s2 |
| 最大纵向加速度,amax, x | 3.0 m/s2 |
| 最小纵向加速度,amin, x | -5.0 m/s2 |
| 最大限制速度,vlimit | 15.0 m/s |
| 最小跟车距离,dc | 10.0 m |
| 安全名义距离,do | 45.0 m |
| 最大制动加速度,amax,dec | -5.0 m/s2 |
| 最大速度,vmax | 15.0 m/s |
| 决策变量 | 性能指标 | 实验1 | 实验2 | 实验3 | 实验4 | 实验5 |
|---|---|---|---|---|---|---|
| 纵向舒适性 | 平均纵向加速度 / (m·s-2) | -0.033 | -0.032 | -0.020 | -0.063 | -0.061 |
| 平均纵向加加速度/ (m·s-3) | 0.057 | 0.044 | 0.016 | 0.084 | 0.077 | |
| 横向舒适性 | 平均横向加速度 / (m·s-2) | 0.260 | 0.247 | 0.216 | 0.257 | 0.252 |
| 平均横向加加速度/ (m·s-3) | -0.025 | -0.041 | 0.005 | -0.020 | -0.041 | |
| 安全性 | 累计车道偏离距离 / m | 1 002.002 | 3 095.45 | 970.017 | 2 528.401 | 2 513.594 |
| 效用性 | 平均正加速度/ (m·s-2) | 0.210 | 0.237 | 0.190 | 0.212 | 0.174 |
| 平均速度/ (m·s-1) | 10.456 | 10.384 | 10.364 | 10.508 | 10.290 |
| 决策变量 | 性能指标 | 实验1 | 实验2 | 实验3 | 实验4 | 实验5 |
|---|---|---|---|---|---|---|
| 纵向舒适性 | 平均纵向加速度 / (m·s-2) | -0.033 | -0.032 | -0.020 | -0.063 | -0.061 |
| 平均纵向加加速度/ (m·s-3) | 0.057 | 0.044 | 0.016 | 0.084 | 0.077 | |
| 横向舒适性 | 平均横向加速度 / (m·s-2) | 0.260 | 0.247 | 0.216 | 0.257 | 0.252 |
| 平均横向加加速度/ (m·s-3) | -0.025 | -0.041 | 0.005 | -0.020 | -0.041 | |
| 安全性 | 累计车道偏离距离 / m | 1 002.002 | 3 095.45 | 970.017 | 2 528.401 | 2 513.594 |
| 效用性 | 平均正加速度/ (m·s-2) | 0.210 | 0.237 | 0.190 | 0.212 | 0.174 |
| 平均速度/ (m·s-1) | 10.456 | 10.384 | 10.364 | 10.508 | 10.290 |
| 决策变量 | 性能指标 | 实验1 | 实验2 | 实验3 | 实验4 | 实验5 |
|---|---|---|---|---|---|---|
| 纵向舒适性 | 平均纵向加速度 / (m·s-2) | -0.062 | -0.062 | -0.0503 | -0.091 | -0.088 |
| 平均纵向加加速度 / (m·s-3) | 0.095 | 0.162 | 0.183 | 0.303 | 0.094 | |
| 横向舒适性 | 平均横向加速度 / (m·s-2) | 0.228 | 0.214 | 0.181 | 0.223 | 0.219 |
| 平均横向加加速度 / (m·s-3) | 0.018 | 0.012 | 0.002 | 0.006 | 0.020 | |
| 安全性 | 累计车道偏离距离 / m | 1 067.93 | 3 229.37 | 860.42 | 2 416.34 | 2 379.53 |
| 效用性 | 平均正加速度 / (m·s-2) | 0.192 | 0.218 | 0.193 | 0.207 | 0.188 |
| 平均速度/ (m·s-1) | 10.251 | 10.292 | 10.399 | 10.459 | 10.386 |
| 决策变量 | 性能指标 | 实验1 | 实验2 | 实验3 | 实验4 | 实验5 |
|---|---|---|---|---|---|---|
| 纵向舒适性 | 平均纵向加速度 / (m·s-2) | -0.062 | -0.062 | -0.0503 | -0.091 | -0.088 |
| 平均纵向加加速度 / (m·s-3) | 0.095 | 0.162 | 0.183 | 0.303 | 0.094 | |
| 横向舒适性 | 平均横向加速度 / (m·s-2) | 0.228 | 0.214 | 0.181 | 0.223 | 0.219 |
| 平均横向加加速度 / (m·s-3) | 0.018 | 0.012 | 0.002 | 0.006 | 0.020 | |
| 安全性 | 累计车道偏离距离 / m | 1 067.93 | 3 229.37 | 860.42 | 2 416.34 | 2 379.53 |
| 效用性 | 平均正加速度 / (m·s-2) | 0.192 | 0.218 | 0.193 | 0.207 | 0.188 |
| 平均速度/ (m·s-1) | 10.251 | 10.292 | 10.399 | 10.459 | 10.386 |
| [1] | 李克强, 戴一凡, 李升波, 等. 智能网联汽车(ICV)技术的发展现状及趋势[J]. 汽车安全与节能学报, 2017, 8(1): 1-14. |
| LI Keqiang, DAI Yifan, LI Shengbo, et al. State-of-the-art and technical trends of intelligent and connected vehicles[J]. J Autom Safe Energ, 2017, 8(1): 1-14. (in Chinese) | |
| [2] |
Claussmann L, Revilloud M, Gruyer D, et al. A review of motion planning for highway autonomous driving[J]. IEEE Trans Intel Transp Syst, 2019, 21(5), 1826-1848.
doi: 10.1109/TITS.6979 URL |
| [3] |
Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: common practices and emerging technologies[J]. IEEE Access, 2020, 8: 58443-58469.
doi: 10.1109/Access.6287639 URL |
| [4] | 余卓平, 李奕姗, 熊璐. 无人车运动规划算法综述[J]. 同济大学学报(自然科学版), 2017, 45(8): 1150-1159. |
| YU Zhuoping, LI Yishan, XIONG Lu. A review of motion planning algorithms for autonomous vehicles[J]. J Tongji Univ (Nat Sci Edit), 2017, 45(8): 1150-1159. (in Chinese) | |
| [5] | ZHENG Ling, ZENG Pengyun, YANG Wei, et al. Bezier curve-based trajectory planning for autonomous vehicles with collision avoidance[J]. IET Intel Transport Syst, 2020, 14(13), 1882-1891. |
| [6] | MENG Fei, SHEN Xuyu, Karimi H R. Emerging methodologies in stability and optimization problems of learning-based nonlinear model predictive control: a survey[J]. Int J Circu Theor Appl, 2022, 50(11), 4146-4170. |
| [7] |
ZHANG Ting, FU Mengyin, SONG Wenjie, et al. Trajectory planning based on spatio-temporal map with collision avoidance guaranteed by safety strip[J]. IEEE Trans Intel Transp Syst, 2022, 23(2): 1030-1043.
doi: 10.1109/TITS.2020.3019514 URL |
| [8] | XIN Long, KONG Yiting, LI Shengbo, et al. Enable faster and smoother spatio-temporal trajectory planning for autonomous vehicles in constrained dynamic environment[J]. Proceed Instit Mech Engi Part D: J Autom Engi, 2021, 235(4): 1101-1112. |
| [9] | Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. Int’l J Robot Res, 2011, 30(7): 846-894. |
| [10] |
Rocamora B M, Pereira G A S. Parallel sensor-space lattice planner for real-time obstacle avoidance[J]. Sensors, 2022, 22(13): 4770.
doi: 10.3390/s22134770 URL |
| [11] | XU Shaobing, Zidek R, CAO Zhong, et al. System and experiments of model-driven motion planning and control for autonomous vehicles[J]. IEEE Tran Syst, Man, Cybernet: Syst, 2022, 52(9): 5975-5988. |
| [12] | Manzinger S, Pek C, Althoff M. Using reachable sets for trajectory planning of automated vehicles[J]. IEEE Trans Intel Vehi, 2021, 6(2): 232-248. |
| [13] |
Rasekhipour Y, Khajepour A, Chen S K, et al. A potential field-based model predictive path-planning controller for autonomous road vehicles[J]. IEEE Trans Intel Transp Syst, 2016, 18: 1255-1267.
doi: 10.1109/TITS.2016.2604240 URL |
| [14] | CHEN Jianyu, Zhan Wei, Tomizuka M. Constrained iterative lqr for on-road autonomous driving motion planning[C]// 2017 IEEE 20th Int’l Conf Intel Transport Syst (ITSC). Yokohama, Japan. 2017. |
| [15] |
Artuñedo A, Villagra J, Godoy J. Real-Time motion planning approach for automated driving in urban environments[J]. IEEE Access, 2019, 7: 180039-180053.
doi: 10.1109/Access.6287639 URL |
| [16] |
Martinez J J, Canudas-de-Wit C. A safe longitudinal control for adaptive cruise control and stop-and-go scenarios[J]. IEEE Trans Contr Syst Tech, 2007, 15: 246-258.
doi: 10.1109/TCST.2006.886432 URL |
| [17] | Svensson L, Eriksson J C. Tuning for ride quality in autonomous vehicle application to linear quadratic path planning algorithm[D]. Uppsala Universitet, Uppsala, Sweden, 2015. |
| [18] |
Sentouh C, Nguyen A, Benloucif M A, et al. Driver-Automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Trans Contr Syst Tech, 2019, 27: 1962-1978.
doi: 10.1109/TCST.87 URL |
| [19] |
Medina-Lee J, Artuñedo A, Godoy J, et al. Merit-Based motion planning for autonomous vehicles in urban scenarios[J]. Sensors, 2021, 21(11): 3755.
doi: 10.3390/s21113755 URL |
| [20] | Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenet frame[C] // 2010 IEEE Int’l Conf Robot Auto. Anchorage, AK, USA, 2010. |
| [1] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [2] | 欧阳德霖, 邱一凡, 王英臣, 阳亮, 闵海根, 王文军, 李国法. 端到端的多任务车辆自动驾驶行为决策模型[J]. 汽车安全与节能学报, 2025, 16(4): 610-619. |
| [3] | 李国法, 欧阳德霖, 陈晨, 聂冰冰, 张伟, 禹慧丽, 刘斌, 张强, 王文军, 成波, 李升波. 驾驶风险监测与干预技术研究综述[J]. 汽车安全与节能学报, 2025, 16(2): 181-196. |
| [4] | 胡志龙, 裴晓飞, 周洪龙, 魏炜冉. 基于风险敏感的自动驾驶汽车分层强化学习决策[J]. 汽车安全与节能学报, 2025, 16(2): 326-333. |
| [5] | 杨俊儒, 郑四发, 许述财, 田野, 孙剑, 孙川, 李浩然. 基于OnSite平台的自动泊车测评工具的研究与设计[J]. 汽车安全与节能学报, 2025, 16(2): 334-343. |
| [6] | 杨澜, 赵祥模, 王润民, 王振, 房山, 瞿广跃. 自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1): 1-15. |
| [7] | 李怡, 刘显贵, 唐耀红, 陈立沛, 陈洋睿, 游铭娴. 变曲率道路下自动驾驶小客车安全稳定跟踪控制策略[J]. 汽车安全与节能学报, 2025, 16(1): 136-147. |
| [8] | 刘擎超, 王瑞海, 蔡英凤, 王海, 陈龙. 基于CatBoost和SHAP的高级别自动驾驶车辆非预期停车冲突风险预测[J]. 汽车安全与节能学报, 2025, 16(1): 170-180. |
| [9] | 曹莉凌, 刘君丽, 金升烨, 曹守启, 周国峰. 面向自动驾驶的远程多维信息实时交互系统设计[J]. 汽车安全与节能学报, 2024, 15(6): 934-942. |
| [10] | 刘洋, 占佳豪, 李深, 李小鹏, 陈峻. 自动驾驶技术的未来:单车智能和智能车路协同[J]. 汽车安全与节能学报, 2024, 15(5): 611-633. |
| [11] | 瞿广跃, 杨澜, 袁梦, 房山, 刘松岩. 面向自动驾驶汽车的信号交叉口行人多模态轨迹预测方法[J]. 汽车安全与节能学报, 2024, 15(5): 689-701. |
| [12] | 柳鹏, 赵克刚, 梁志豪, 叶杰. 基于深度强化学习CLPER-DDPG的车辆纵向速度规划[J]. 汽车安全与节能学报, 2024, 15(5): 702-710. |
| [13] | 高凯, 刘健, 刘林鸿, 刘欣宇, 张金来, 杜荣华. 基于LSTM-多头混合注意力的可解释换道意图预测[J]. 汽车安全与节能学报, 2024, 15(5): 763-773. |
| [14] | 郑讯佳, 蒋骏皓, 李会兰, 陈星, 刘辉, 王建强, 高建杰. 交通规则强约束下瞬态行车风险矢量建模方法研究[J]. 汽车安全与节能学报, 2024, 15(5): 774-782. |
| [15] | 谢震, 周国峰, 邬明宇, 曹守启. 港口自动驾驶集卡动力学模型构建研究[J]. 汽车安全与节能学报, 2024, 15(5): 783-794. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||