欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2025, Vol. 16 ›› Issue (1): 1-15.DOI: 10.3969/j.issn.1674-8484.2025.01.001
• 综述与展望 • 下一篇
杨澜( ), 赵祥模, 王润民, 王振, 房山, 瞿广跃
), 赵祥模, 王润民, 王振, 房山, 瞿广跃
收稿日期:2024-12-13
修回日期:2025-02-12
出版日期:2025-02-28
发布日期:2025-03-04
作者简介:杨澜(1985—),女(汉),陕西,正高级工程师。E-mail:lanyang@chd.edu.cn。基金资助:
YANG Lan(), ZHAO Xiangmo, WANG Runmin, WANG Zhen, FANG Shan, QU Guangyue
Received:2024-12-13
Revised:2025-02-12
Online:2025-02-28
Published:2025-03-04
摘要:
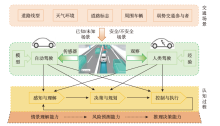
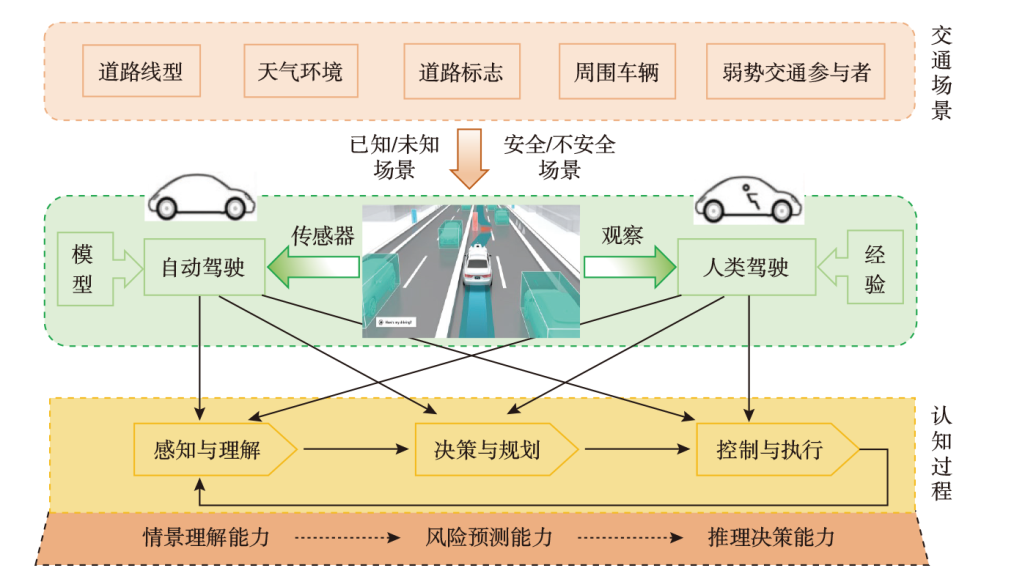
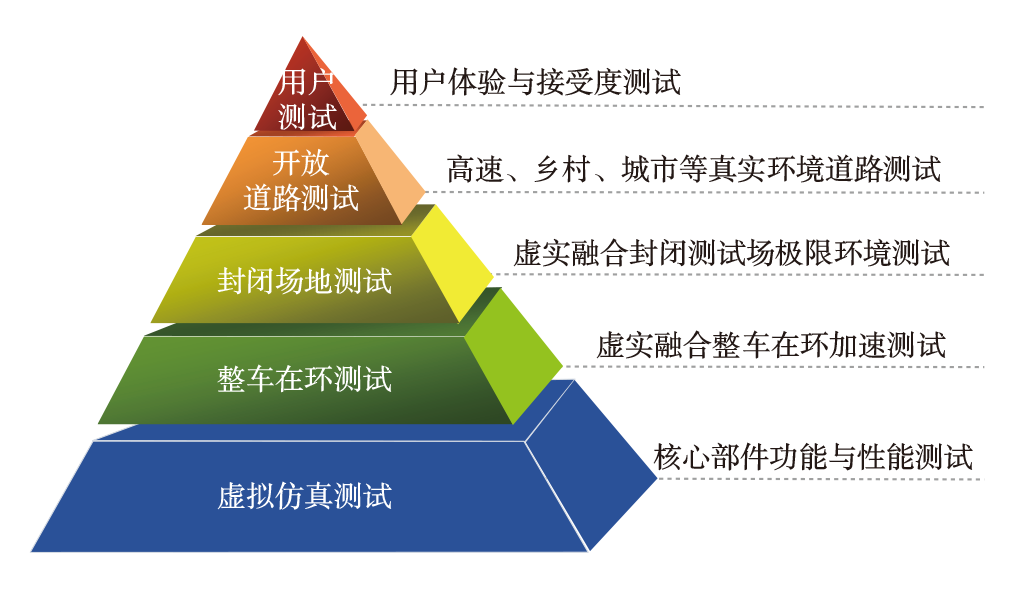
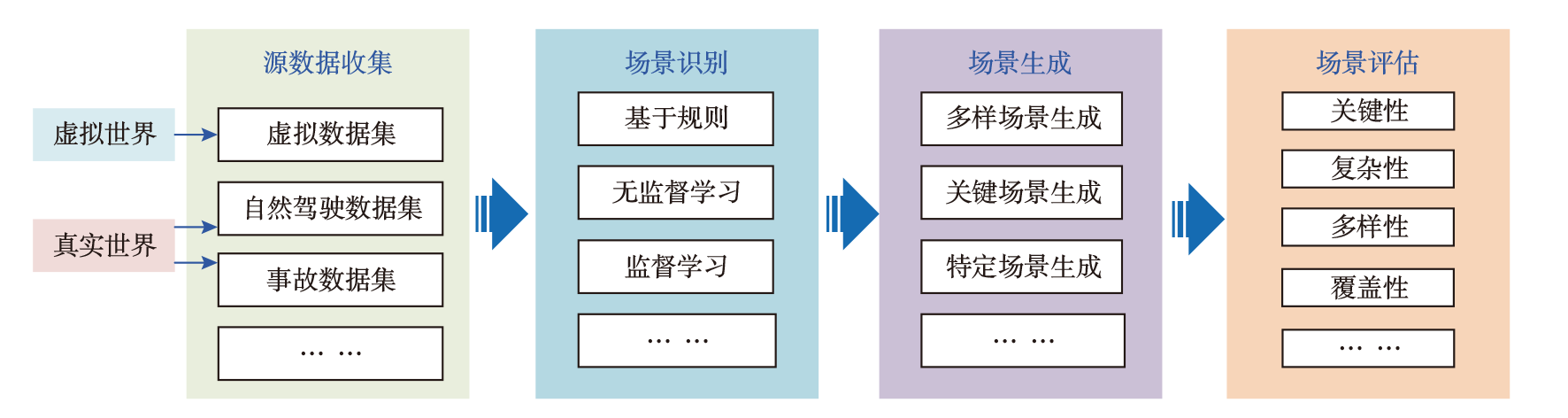
对交通动态情境的准确认知是自动驾驶(AV)智能性的关键体现,因此全面、合理、高效的测试评价方法对于验证其效能至关重要。为了跟踪自动驾驶认知能力测试评价的研究进展,该文首先从宏观、中观和微观3个层面深入剖析了自动驾驶测试领域存在的核心问题,深入探讨了自动驾驶与人类驾驶在认知方面的关联性;其次,从基于“金字塔”模型的自动驾驶测试体系架构入手,全面回顾了在关键测试场景生成、虚拟仿真测试、虚实融合测试、实际道路测试以及认知能力评价等领域的最新研究成果;最后,指出了自动驾驶认知能力测试评价领域面临的挑战和发展趋势。该综述研究成果将为自动驾驶技术的迭代演进和功能验证提供重要参考。
中图分类号:
杨澜, 赵祥模, 王润民, 王振, 房山, 瞿广跃. 自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1): 1-15.
YANG Lan, ZHAO Xiangmo, WANG Runmin, WANG Zhen, FANG Shan, QU Guangyue. Review on testing and evaluation of cognitive abilities for autonomous vehicles[J]. Journal of Automotive Safety and Energy, 2025, 16(1): 1-15.



| 测试目的 | 仿真工具 | 车辆动 力学模型 | 传感器 与环境 | 行人与非机 动车模型 |
|---|---|---|---|---|
| 动力学 仿真 | CarSim | 好 | 有 | 有 |
| CarMaker | 好 | 有 | 有 | |
| 交通流 仿真 | VISSIM | 无 | 无 | 良 |
| SUMO | 无 | 无 | 良 | |
| ADAS 仿真 | PreScan | 有 | 良 | 有 |
| VTD | 有 | 良 | 有 | |
| SCANeR | 有 | 良 | 有 | |
| Panosim | 良 | 良 | 有 | |
| 自动驾驶 仿真 | CARLA | 有 | 有 | 有 |
| Carcraft | 有 | 好 | 良 | |
| Waymax | 有 | 好 | 良 | |
| TADSim | 有 | 好 | 良 | |
| 51 Sim-One | 有 | 好 | 良 | |
| Apollo | 有 | 好 | 良 | |
| TESS NG | 有 | 好 | 良 |
| 测试目的 | 仿真工具 | 车辆动 力学模型 | 传感器 与环境 | 行人与非机 动车模型 |
|---|---|---|---|---|
| 动力学 仿真 | CarSim | 好 | 有 | 有 |
| CarMaker | 好 | 有 | 有 | |
| 交通流 仿真 | VISSIM | 无 | 无 | 良 |
| SUMO | 无 | 无 | 良 | |
| ADAS 仿真 | PreScan | 有 | 良 | 有 |
| VTD | 有 | 良 | 有 | |
| SCANeR | 有 | 良 | 有 | |
| Panosim | 良 | 良 | 有 | |
| 自动驾驶 仿真 | CARLA | 有 | 有 | 有 |
| Carcraft | 有 | 好 | 良 | |
| Waymax | 有 | 好 | 良 | |
| TADSim | 有 | 好 | 良 | |
| 51 Sim-One | 有 | 好 | 良 | |
| Apollo | 有 | 好 | 良 | |
| TESS NG | 有 | 好 | 良 |
| 序号 | 标准编号 | 标准名称 |
|---|---|---|
| 1 | GB/T 37471-2019 | 智能运输系统 换道决策辅助系统 性能要求与检测方法 |
| 2 | GB/T 38186-2019 | 商用车辆自动紧急制动系统(AEBS)性能要求及试验方法 |
| 3 | GB/T 39323-2020 | 乘用车车道保持辅助系统性能要求及试验方法 |
| 4 | GB/T 39901-2021 | 乘用车自动紧急制动系统性能要求及试验方法 |
| 5 | GB/T 41630-2022 | 智能泊车辅助系统性能要求及试验方法 |
| 6 | GB/T 41796-2022 | 商用车辆车道保持辅助系统性能要求及试验方法 |
| 7 | 20241853-Q-339 | 轻型汽车自动紧急制动系统技术要求及试验方法(起草) |
| 8 | 20231463-T-339 | 智能网联汽车自动泊车系统性能要求与试验方法(征求意见) |
| 序号 | 标准编号 | 标准名称 |
|---|---|---|
| 1 | GB/T 37471-2019 | 智能运输系统 换道决策辅助系统 性能要求与检测方法 |
| 2 | GB/T 38186-2019 | 商用车辆自动紧急制动系统(AEBS)性能要求及试验方法 |
| 3 | GB/T 39323-2020 | 乘用车车道保持辅助系统性能要求及试验方法 |
| 4 | GB/T 39901-2021 | 乘用车自动紧急制动系统性能要求及试验方法 |
| 5 | GB/T 41630-2022 | 智能泊车辅助系统性能要求及试验方法 |
| 6 | GB/T 41796-2022 | 商用车辆车道保持辅助系统性能要求及试验方法 |
| 7 | 20241853-Q-339 | 轻型汽车自动紧急制动系统技术要求及试验方法(起草) |
| 8 | 20231463-T-339 | 智能网联汽车自动泊车系统性能要求与试验方法(征求意见) |
| 城市 | 发布日期 | 法规/政策名称 |
|---|---|---|
| 深圳 | 2022.06.30 | 《深圳经济特区智能网联汽车管理条例》 |
| 江苏 | 2023.08.07 | 《江苏省道路交通安全条例》 |
| 北京 | 2021.10.15 | 《北京市智能网联汽车政策先行区无人化道路测试管理实施细则》 |
| 上海 | 2024.06.30 | 《北京市自动驾驶汽车条例(征求意见稿)》 |
| 2021.12.29 | 《上海市智能网联汽车测试与应用管理办法》 | |
| 2022.11.23 | 《上海市浦东新区促进无驾驶人智能网联汽车创新应用规定》 | |
| 2023.01.18 | 《上海市智能网联汽车高快速路测试与示范实施方案》 | |
| 2023.03.21 | 《上海市浦东新区促进无驾驶人智能网联汽车创新应用规定实施细则》 | |
| 2023.04.27 | 《嘉定区建设世界智能网联汽车创新高地行动方案(2023年—2025年)》 | |
| 2023.11.16 | 《中国(上海)自由贸易试验区临港片区促进智能网联汽车发展若干政策》 | |
| 成都 | 2023.05.29 | 《关于推进成都市智能网联汽车远程驾驶测试与示范应用的指导意见》 |
| 城市 | 发布日期 | 法规/政策名称 |
|---|---|---|
| 深圳 | 2022.06.30 | 《深圳经济特区智能网联汽车管理条例》 |
| 江苏 | 2023.08.07 | 《江苏省道路交通安全条例》 |
| 北京 | 2021.10.15 | 《北京市智能网联汽车政策先行区无人化道路测试管理实施细则》 |
| 上海 | 2024.06.30 | 《北京市自动驾驶汽车条例(征求意见稿)》 |
| 2021.12.29 | 《上海市智能网联汽车测试与应用管理办法》 | |
| 2022.11.23 | 《上海市浦东新区促进无驾驶人智能网联汽车创新应用规定》 | |
| 2023.01.18 | 《上海市智能网联汽车高快速路测试与示范实施方案》 | |
| 2023.03.21 | 《上海市浦东新区促进无驾驶人智能网联汽车创新应用规定实施细则》 | |
| 2023.04.27 | 《嘉定区建设世界智能网联汽车创新高地行动方案(2023年—2025年)》 | |
| 2023.11.16 | 《中国(上海)自由贸易试验区临港片区促进智能网联汽车发展若干政策》 | |
| 成都 | 2023.05.29 | 《关于推进成都市智能网联汽车远程驾驶测试与示范应用的指导意见》 |
| [1] |
王之中, 余荣杰, 皮大伟. 顶层设计目标导向交叉融通服务未来:国家自然科学基金委员会交通与运载工程学科建设回顾与展望[J]. 前瞻科技, 2023, 2(3): 5-20.
doi: 10.3981/j.issn.2097-0781.2023.03.001 |
| WANG Zhizhong, YU Rongjie, PI Dawei. Top-level design, goal-oriented, cross-integration, serving the future:Review and outlook on the construction of the transportation and engineering discipline of the National Natural Science Foundation of China[J]. Foresight Sci Tec, 2023, 2(3): 5-20. (in Chinese) | |
| [2] |
余荣杰, 田野, 孙剑. 高等级自动驾驶汽车虚拟测试:研究进展与前沿[J]. 中国公路学报, 2020, 33(11): 125-138.
doi: 10.19721/j.cnki.1001-7372.2020.11.011 |
| YU Rongjie, TIAN Ye, SUN Jian. Virtual testing of high-level autonomous vehicles: Research progress and frontier[J]. China J Highway Transpor, 2020, 33(11): 125-138. (in Chinese) | |
| [3] | Menzel T, Bagschik G, Maurer M. Scenarios for development, test and validation of automated vehicles[C]// 2018 IEEE Intel Vehi Symp (IV), Changshu, China, 2018: 1821-1827. |
| [4] | Koopman P. Measuring and Predicting Autonomous Vehicle Safety[M]. Independently published, 2022: 45-112. |
| [5] | 赵祥模国家重点研发计划(2021YFB2501200)团队. 自动驾驶测试与评价技术研究进展[J]. 交通运输工程学报, 2023, 23(6): 10-77. |
| ZHAO Xiangmo National Key R&D Program (2021YFB2501200) Team. Research progress on autonomous driving testing and evaluation technologies[J]. J Transport Eng, 2023, 23(6): 10-77. (in Chinese) | |
| [6] |
王聪, 胡文, 李文博, 等. 社会认知自动驾驶[J]. 机械工程学报, 2023, 59(20): 304-324.
doi: 10.3901/JME.2023.20.304 |
|
WANG Cong, HU Wen, LI Wenbo, et al. Socially cognitive autonomous driving[J]. J Mech Eng, 2023, 59(20): 304-324. (in Chinese)
doi: 10.3901/JME.2023.20.304 |
|
| [7] | YANG Lan, LIU Songyan, FENG Shuo, et al. Generation of critical pedestrian scenarios for autonomous vehicle testing [J/OL]. Accid Analy Preve, online. [2025-02-19] https://doi.org/10.1016/j.aap.2025.107962. |
| [8] | 王润民, 朱宇, 赵祥模, 等. 自动驾驶测试场景研究进展[J]. 交通运输工程学报, 2021, 21(2): 21-37. |
| WANG Runmin, ZHU Yu, ZHAO Xiangmo, et al. Research progress on autonomous driving test scenarios[J]. J Transport Eng, 2021, 21(2): 21-37. (in Chinese) | |
| [9] | ZHAO Ding, HUANG Xianan, PENG Huei, et al. Accelerated evaluation of automated vehicles in car-following maneuvers[J]. IEEE Trans Intel Transport Sys, 2018, 19(3) : 733-744. |
| [10] | FENG Shuo, FENG Yiheng, YU Chunhui, et al. Testing scenario library generation for connected and automated vehicles, part I: methodology[J]. IEEE Trans Intel Transport Sys, 2021, 22(3): 1573-1582. |
| [11] | FENG Shuo, YAN Xintao, SUN Haowei, et al. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment[J]. Natu Communica, 2021, 12(1): 748-761. |
| [12] | SUN Jian, ZHOU Huajun, XI Haochen, et al. Adaptive design of experiments for safety evaluation of automated vehicles[J]. IEEE Trans Intel Transport Sys, 2021, 23(9): 14497-14508. |
| [13] |
李鹏辉, 董倩茹, 袁赫男, 等. 面向自动驾驶仿真测试的高覆盖切入场景库生成方法[J]. 中国公路学报, 2024, 37(7): 237-249.
doi: 10.19721/j.cnki.1001-7372.2024.07.019 |
| LI Penghui, DONG Qianru, YUAN Henan, et al. Method for generating high-coverage entry scenario libraries for autonomous driving simulation testing[J]. China J Highw Transpor, 2024, 37(7): 237-249. (in Chinese) | |
| [14] | DING Wenhao, CHEN Baiming, LI Bo, et al. Multimodal safety-critical scenarios generation for decision- making algorithms evaluation[J]. IEEE Robot Autom Let, 2021, 6(2): 1551-1558. |
| [15] |
邓伟文, 李江坤, 任秉韬, 等. 面向自动驾驶的仿真场景自动生成方法综述[J]. 中国公路学报, 2022, 35(1): 316-333.
doi: 10.19721/j.cnki.1001-7372.2022.01.027 |
| DENG Weiwen, LI Jiankun, REN Bingtao, et al. Review of automatic generation methods for autonomous driving simulation scenarios[J]. China J Highw Transpor, 2022, 35(1): 316-333. (in Chinese) | |
| [16] |
陈吉清, 舒孝雄, 兰凤崇, 等. 典型危险事故特征的自动驾驶测试场景构建[J]. 华南理工大学学报(自然科学版), 2021, 49(5): 1-8.
doi: 10.12141/j.issn.1000-565X.200371 |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong, et al. Construction of autonomous driving test scenarios based on typical dangerous accident characteristics[J]. J South China Univ Technol(Nat Sci Ed), 2021, 49(5): 1-8. (in Chinese) | |
| [17] | LI Aoxue, CHEN Shitao, SUN Liting, et al. SceGene: Bio-inspired traffic scenario generation for autonomous vehicle testing[J]. IEEE Trans Intel Transport Sys, 2022, 23(9): 14859-14874. |
| [18] | 朱冰, 范天昕, 赵健, 等. 自动驾驶拟人连续交互测试场景生成方法[J]. 汽车工程, 2024, 46(9): 1600-1607. |
| ZHU Bing, FAN Tianxin, ZHAO Jian, et al. Method for generating autonomous driving humanoid continuous interaction test scenarios[J]. Autom En, 2024, 46(9): 1600-1607. (in Chinese) | |
| [19] | Menzel T, Bagschik G, Maurer M. Scenarios for development, test and validation of automated vehicles[C]// 2018 IEEE Intel Vehi Symp (IV), Changshu, China, IEEE, 2018: 1821-1827. |
| [20] | 朱冰, 范天昕, 赵健, 等. 基于危险边界搜索的自动驾驶系统加速测试方法[J]. 吉林大学学报(工学版), 2023, 53(3): 704-712. |
| ZHU Bing, FAN Tianxin, ZHAO Jian, et al. Accelerated testing method for autonomous driving systems based on danger boundary search[J]. J Jilin Univ(Engi Ed), 2023, 53(3): 704-712. (in Chinese) | |
| [21] | LIU Lin, FENG Shuo, FENG Yiheng, et al. Learning-based stochastic driving model for autonomous vehicle testing[J]. Transport Res Recor, 2022, 2676(1): 54-64. |
| [22] | YANG Lan, YUAN Jiaqi, ZHAO Xiangmo, et al. SceGAN: A Method for Generating Autonomous Vehicle Cut-In Scenarios on Highways Based on Deep Learning[J]. J Intel Connect Vehi. 2024, 6(4): 264-274. |
| [23] | DING Wenhao, XU Mingjun, ZHAO Ding, et al. Learning to collide: An adaptive safety-critical scenarios generating method[C]// 2020 IEEE/RSJ Int’l Conf Intel Robot Syst (IROS), Las Vegas, USA, IEEE, 2020: 2243-2250. |
| [24] | Choi S, Kim J, Yeo H. TrajGAIL: Generating urban vehicle trajectories using generative adversarial imitation learning[J]. Transport Res Part C:Emerg Tech, 2021, 128: 103091. |
| [25] | JIA Lulu, YANG Dezhen, REN Yi, et al. A dynamic test scenario generation method for autonomous vehicles based on conditional generative adversarial imitation learning[J]. Accid Anal Prev, 2024, 194: 107279. |
| [26] | DENG Yao, YAO Jiahong, TU Zhi, et al. TARGET: Traffic rule-based test generation for autonomous driving systems[J]. 2023, (Oct 8). https://arxiv.org/abs/2305.06018. |
| [27] | ZHANG Jiawei, XU Chejian, LI Bo. ChatScene: Knowledge-enabled safety-critical scenario generation for autonomous vehicles[C]// 2024 IEEE/CVF Conf Comput Visi Patt Recog (CVPR), Washington, USA. 2024. |
| [28] | GAO Ruiyuan, CHEN Kai, LI Zhihao, et al. MagicDrive3D: Controllable 3D generation for any-view rendering in street scenes[J]. 2024, (Nov 20). https://arxiv.org/abs/2405.14475. |
| [29] | TIAN Hanlin, K. Reddy, FENG Yuxiang, et al. Enhancing autonomous vehicle training with language model integration and critical scenario generation[J]. 2024,(Apr 12). https://arxiv.org/abs/2404.08570. |
| [30] | 李霖, 朱西产, 董小飞, 等. 自主紧急制动系统避撞策略的研究[J]. 汽车工程, 2015, 37(2): 168-174. |
| LI Lin, ZHU Xichan, DONG Xiaofei, et al. Research on collision avoidance strategy for autonomous emergency braking systems[J]. Autom Engineerin, 2015, 37(2): 168-174. (in Chinese) | |
| [31] | ZHU Bing, JIANG Yuande, ZHAO Jian, et al. Typical-driving-style-oriented personalized adaptive cruise control design based on human driving data[J]. Transport Res Part C:Emerg Tech, 2019, 100: 274-288. |
| [32] | Sundaravadivelu K, Shantharam G, Prabaharan P, et al. Analysis of vehicle dynamics using co-simulation of AVL-CRUISE and CarMaker in ETAS RT environment[C]// 2014 Int’l Conf Advan Elect Engi (ICAEE), Dhaka, Bangladesh. IEEE, 2014: 1-4. |
| [33] | Hossain S, Fayjie A R, Doukhi O, et al. CAIAS simulator: self-driving vehicle simulator for AI research[C]// Intel Comput Opti, Skopelos Island, Greece. 2019: 187-195. |
| [34] | José L F Pereira, Rossetti R J F. An integrated architecture for autonomous vehicles simulation[J]. AC, 2012: 286-292 |
| [35] | Hamid U. Z. A, Al-Turjman F. Towards Connected and Autonomous Vehicle Highways[M]. Springer International Publishing, Cham, 2021: 33-46. |
| [36] | YAN Xintao, ZOU Zhengxia, FENG Shuo, et al. Learning naturalistic driving environment with statistical realism[J]. Natu Communica, 2023, 14(1): 2037-2039. |
| [37] | Ard T, GUO Longxiang, Dollar R A, et al. Energy and flow effects of optimal automated driving in mixed traffic: Vehicle-in-the-loop experimental results[J]. Transport Res Part C: Emerg Tech, 2021, 130: 103168. |
| [38] |
孙剑, 黄润涵, 李霖, 等. 智能汽车环境感知与规划决策一体化仿真测试平台[J]. 系统仿真学报, 2020, 32(2): 236-246.
doi: 10.16182/j.issn1004731x.joss.18-0102 |
| SUN Jian, HUANG Runhan, LI Lin, et al. Integrated simulation testing platform for environmental perception and planning decision of intelligent vehicles[J]. J Syst Simula, 2020, 32(2): 236-246. (in Chinese) | |
| [39] | Kim Y, Tay S, Guanetti J, et al. Hardware-in-the-loop for connected automated vehicles testing in real traffic[J]. arXiv preprint arXi, 2019, 1907: 09052. |
| [40] | LI Hexuan, Nalic D, Makkapati V, et al. A real-time co-simulation framework for virtual test and validation on a high dynamic vehicle test bed[C]// 2021 IEEE Intel Vehi Symp (IV), Nagoya, Japan, IEEE, 2021: 1132-1137. |
| [41] | Van Brummelen J, O’Brien M, Gruyer D, et al. Autonomous vehicle perception: The technology of today and tomorrow[J]. Transport Res Part C: Emerg Tech, 2018, 89: 384-406. |
| [42] | LI Li, WANG Xiao, WANG Kunfeng, et al. Parallel testing of vehicle intelligence via virtual-real interaction[J]. Sci Robo, 2019, 4(28): 106-129. |
| [43] | Kelly M, Sinha A, Namkoong H, et al. Scalable end-to-end autonomous vehicle testing via rare-event simulation[J]. Advan Neural Info Proc Sys, 2018, 31: 9849-9860. |
| [44] | 杨澜, 杨一鹏, 刘松岩, 等. 考虑前车制动意图的自动紧急制动策略及其测试评价方法[J]. 汽车技术, 2024(2): 25-32. |
| YANG Lan, YANG Yipeng, LIU Songyan, et al. Automatic emergency braking strategy considering the braking intention of the preceding vehicle and its testing and evaluation method[J]. Autom Tec, 2024(2): 25-32. (in Chinese) | |
| [45] | 王晓, 张翔宇, 周锐, 等. 基于平行测试的认知自动驾驶智能架构研究[J]. 自动化学报, 2024, 50(2): 356-371. |
| WANG Xiao, ZHANG Xiangyu, ZHOU Rui, et al. Research on cognitive autonomous driving intelligent architecture based on parallel testing[J]. Acta Automatica Sinic, 2024, 50(2): 356-371. (in Chinese) | |
| [46] | MA Jiaqi, ZHOU Fang, HUANG Zhitao, et al. Hardware-in-the-loop testing of connected and automated vehicle applications: A use case for cooperative adaptive cruise control[C]// 2018 IEEE Int’l Conf Intel Transport Syst (ITSC), Hawaii, USA. IEEE, 2018. |
| [47] | Mohajer N, Asadi H, Nahavandi S, et al. Evaluation of the path tracking performance of autonomous vehicles using the universal motion simulator[C]// 2018 IEEE Int’l Conf Syst, Man, and Cybernetics (SMC), Miyazaki, Japan. IEEE, 2018. |
| [48] | ZHAO Xiangmo, GAO Ying, JIN Shaojie, et al. Development of a cyber-physical-system perspective based simulation platform for optimizing connected automated vehicles dedicated lanes[J]. Expert Syst Appl, 2023, 213: 118972. |
| [49] | Schyr C, Brissard A. Drivingcube: A novel concept for validation of powertrain and steering systems with automated driving[M]// Advanced Vehicle Control. CRC Press, Munich, 2016: 79-84. |
| [50] | 赵祥模, 王文威, 王润民, 等. 智能汽车整车在环测试台转向随动系统[J]. 长安大学学报(自然科学版), 2019, 39(6): 116-126. |
| ZHAO Xiangmo, WANG Wenwei, WANG Runmin, et al. Steering follow-up system of intelligent vehicle on full-vehicle test bench[J]. J Chang'an Univ (Nat Sci Ed), 2019, 39(6): 116-126. (in Chinese) | |
| [51] |
赵祥模, 承靖钧, 徐志刚, 等. 基于整车在环仿真的自动驾驶汽车室内快速测试平台[J]. 中国公路学报, 2019, 32(6): 124-136.
doi: 10.19721/j.cnki.1001-7372.2019.06.013 |
| ZHAO Xiangmo, CHENG Jingjun, XU Zhigang, et al. Indoor rapid testing platform for autonomous vehicles based on full-vehicle-in-the-loop simulation[J]. China J Highway Transpor, 2019, 32(6): 124-136. (in Chinese) | |
| [52] |
舒红, 王志洋, 李石, 等. 无信号灯十字路口自动驾驶汽车直行关键场景构建[J]. 中国公路学报, 2022, 35(7): 328-338.
doi: 10.19721/j.cnki.1001-7372.2022.07.028 |
| SHU Hong, WANG Zhiyang, LI Shi, et al. Construction of key scenarios for autonomous vehicles driving straight through unsignalized intersections[J]. China J Highway Transpor, 2022, 35(7): 328-338. (in Chinese) | |
| [53] | ZHANG He, SUN Jian, TIAN Ye. Accelerated testing for highly automated vehicles: A combined method based on importance sampling and normalizing flows[C]// 2022 IEEE 25th Int’l Conf Intel Transport Syst (ITSC), Los Angeles, USA, IEEE, 2022: 574-579. |
| [54] | WU Guoyuan, Brown D, ZHAO Zhouqiao, et al. Dyno-in-the-loop: An innovative hardware-in-the-loop development and testing platform for emerging mobility technologies[J]. SAE Technical Pape, 2020, 1: 1-16. |
| [55] | Park C, Chung S, Lee H. Vehicle-in-the-loop in global coordinates for advanced driver assistance system[J]. Appl Sc, 2020, 10(8): 2645-2655. |
| [56] | XIA Qin, DUAN Jianli, GAO Feng, et al. Test scenario design for intelligent driving system ensuring coverage and effectiveness[J]. Int’l J Autom Tec, 2018, 19: 751-758. |
| [57] |
舒红, 袁康, 修海林, 等. 自动驾驶汽车基础测试场景构建研究[J]. 中国公路学报, 2019, 32(11): 245- 254.
doi: 10.19721/j.cnki.1001-7372.2019.11.025 |
| SHU Hong, YUAN Kang, XIU Hailin, et al. Research on the construction of basic test scenarios for autonomous vehicles[J]. China J Highw Transpor, 2019, 32(11): 245-254. (in Chinese) | |
| [58] | YANG Lan, WANG Runmin, ZHAO Xiangmo, et al. CAVTest: A Closed connected and automated vehicles test field of Chang’an University in China[J]. SAE Int’l J CA, 2021, 4(4): 423-435. |
| [59] | FENG Shuo, FENG yiheng, YAN Xintao, et al. Safety assessment of highly automated driving systems in test tracks: A new framework[J]. Accid Anal Prev, 2020, 144: 105664. |
| [60] | SAE International. Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles[S]. Warrendale: SAE International, 2018. |
| [61] | Kaliksf S F, Prokhorov D V. Automotive Turing test[C]// The Workshop Perform Metri Intel Sys, Pittsburgh, USA, ACM, 2007: 152-158. |
| [62] | MENG Kaiwen, ZHAO Yanan, GAO Li, et al. Evaluation of the intelligent behaviors of unmanned ground vehicles based on information theory[M]// CICTP 2015. Beijing, 2015: 410-419. |
| [63] | LI Li, HUANG Wuling, LIU Yuehu, et al. Intelligence testing for autonomous vehicles: A new approach[J]. IEEE Trans Intel Veh, 2016, 1(2): 158-160. |
| [64] | 陈君毅, 陈磊, 蒙昊蓝, 等. 基于神经网络的车辆交通协调性评价模型[J]. 同济大学学报(自然科学版), 2021, 49(1): 135-141. |
| CHEN Junyi, CHEN Lei, MENG Haolan, et al. Vehicle traffic coordination evaluation model based on neural networks[J]. J Tongji Univ (Nat Sci Ed), 2021, 49(1): 135-141. (in Chinese) | |
| [65] | Jahangirova G, Stocco A, Tonella P. Quality metrics and oracles for autonomous vehicles testing[C]// 2021 14th IEEE Conf Softw Test, Verificat, Valid (ICST), Madrid, Spain, IEEE, 2021: 194-204. |
| [66] | Genser A, Hofer R S, Nitsche P, et al. Ride comfort assessment for automated vehicles utilizing a road surface model and Monte Carlo simulations[J]. Comput-Aid Civil Infrast Eng, 2022, 37(10): 1316-1334. |
| [67] | 蒙昊蓝, 陈君毅, 邢星宇, 等. 汽车乘员不舒适感的客观表征研究[J]. 同济大学学报(自然科学版), 2019, 47(S1): 54-63. |
| MENG Haolan, CHEN Junyi, XING Xingyu, et al. Objective representation of discomfort in car occupants[J]. J Tongji Univ (Nat Sci Ed), 2019, 47(S1): 54-63. (in Chinese) | |
| [68] | TIAN Danyang, WU Guoyuan, Boriboonsomsin K, et al. Performance measurement evaluation framework and co-benefit tradeoff analysis for connected and automated vehicles (CAV) applications: A survey[J]. IEEE Intel Transport Syst Maga, 2018, 10(3): 110-122. |
| [69] | Ahmed M M, YANG Guangchuan, Gaweesh S, et al. Performance evaluation framework of Wyoming connected vehicle pilot deployment program: Summary of Phase 2 pre-deployment efforts and lessons learned[J]. J Intel Connect Veh, 2019, 2(2): 41-54. |
| [70] | Sohrabi S, Khodadadi A, Mousavi S M, et al. Quantifying the automated vehicle safety performance: A review of the literature, evaluation of methods, and directions for future research[J]. Accid Anal Prev, 2021, 152: 106003. |
| [71] | Genser A, Spielhofer R, Nitsche P, et al. Ride comfort assessment for automated vehicles utilizing a road surface model and Monte Carlo simulations[J]. Comput-Aid Civi Infrast Eng, 2022, 37(10): 1316-1334. |
| [72] | Roesener C, Sauerbier J, Zlocki A, et al. A comprehensive evaluation approach for highly automated driving[C]// Enhan Safe Vehi, Detroit, USA: National Highway Traffic Safety Administration, 2017, 56-70. |
| [73] |
王文军, 李清坤, 曾超, 等. 自动驾驶接管绩效的影响因素、模型与评价方法综述[J]. 中国公路学报, 2023, 36(9): 202-224.
doi: 10.19721/j.cnki.1001-7372.2023.09.017 |
| WANG Wenjun, LI Qingkun, ZENG Chao, et al. Review of influencing factors, models, and evaluation methods for autonomous driving takeover performance[J]. China J Highw Transpor, 2023, 36(9): 202-224. (in Chinese) | |
| [74] | ZHANG Peixing, ZHU Bing, ZHAO Jian, et al. Safety evaluation method in multi-logical scenarios for automated vehicles based on naturalistic driving trajectory[J]. Accid Anal Prev, 2023, 108: 106926. |
| [75] | 李文礼, 李超, 李中峰, 等. 基于匝道合流数据的自动驾驶汽车安全性测试评价方法[J]. 重庆交通大学学报(自然科学版), 2024, 43(2): 84-91. |
| LI Wenli, LI Chao, LI Zhongfeng, et al. Safety testing and evaluation method for autonomous vehicles based on ramp merging data[J]. J Chongqing Jiaotong Univ (Nat Sci Ed), 2024, 43(2): 84-91. (in Chinese) | |
| [76] | Quante L, ZHANG Meng, Preuk K, et al. Human performance in critic al scenarios as a benchmark for highly automated vehicles[J]. Autom Inn, 2021, 4(3): 274-283. |
| [77] | Soheil S, Ali K, Seyedeh M, et al. Quantifying the automated vehicle safety performance: A scoping review of the literature, evaluation of methods, and directions for future research[J]. Accid Anal Prev, 2021, 152: 106003. |
| [78] | Machida T, Shitaoka K. Test coverage index for ADAS/ADS assessment based on various real-world information points[J]. IEEE Trans Intel Transport Sys, 2022, 23(2): 1443-1455. |
| [79] | LUO Yueqi, XIANG Dan, ZHANG Songan, et al. Evaluation on the fuel economy of automated vehicles with data-driven simulation method[J]. Energy A, 2021, 3: 100051. |
| [80] | HUANG Heye, ZHENG Xunjia, YANG Yibin, et al. An integrated architecture for intelligence evaluation of automated vehicles[J]. Accid Anal Prev, 2020, 145: 105681. |
| [1] | 吴 俊,向国梁,杨俊辉,等. 汽车自动紧急制动(AEB)行人检测系统的开发与测试[J]. JASE, 2018, 9(4): 401-409. |
| [2] | 符钢战,吴小员,周敏洁,施欢,汪健. 试驾用户对电动乘用汽车的评价和购买倾向[J]. 汽车安全与节能学报, 2013, 4(3): 273-278. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||