欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2024, Vol. 15 ›› Issue (5): 650-659.DOI: 10.3969/j.issn.1674-8484.2024.05.003
杨东辉( ), 王昱昊()
), 王昱昊()
收稿日期:2024-08-07
修回日期:2024-09-24
出版日期:2024-10-31
发布日期:2024-11-07
通讯作者:
王昱昊,助理研究员。E-mail:作者简介:杨东辉(2002—),男(汉),北京,博士研究生。E-mail:ydh24@mails.tsinghua.edu.cn。
基金资助:
YANG Donghui(), WANG Yuhao()
Received:2024-08-07
Revised:2024-09-24
Online:2024-10-31
Published:2024-11-07
摘要:
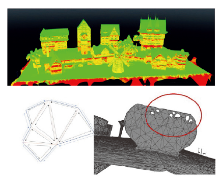
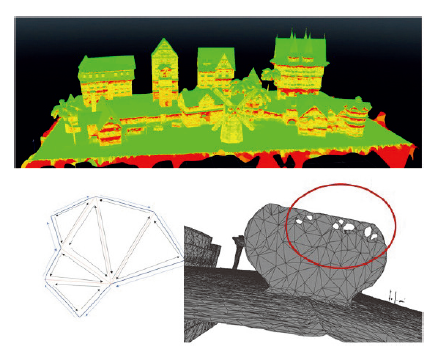
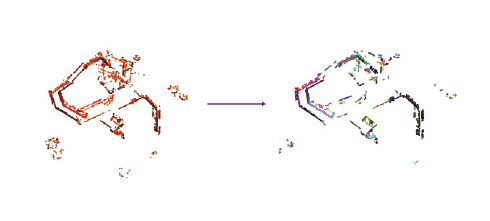
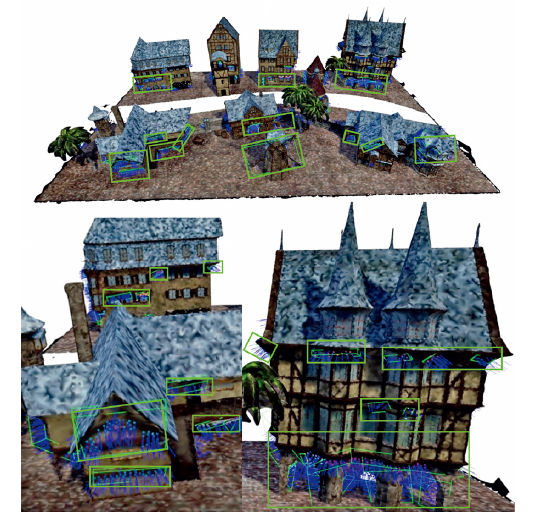
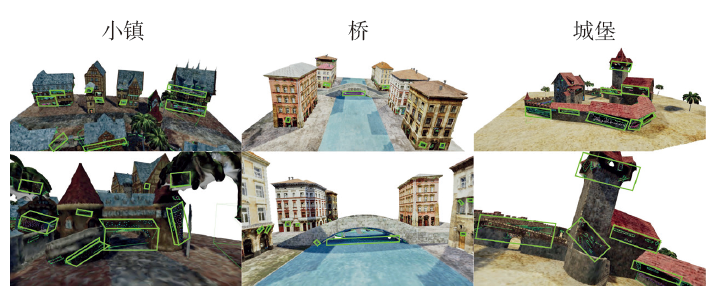
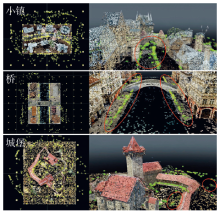
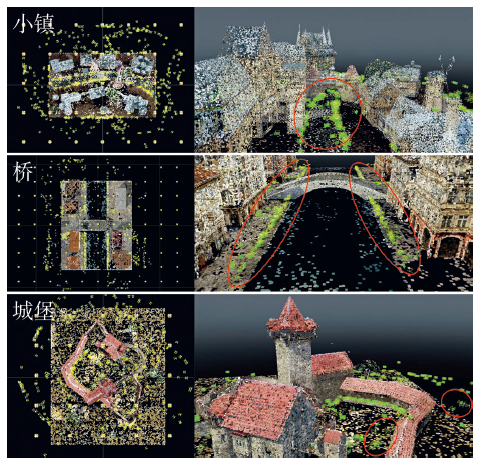
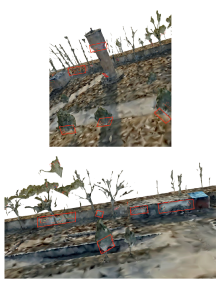
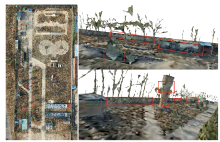
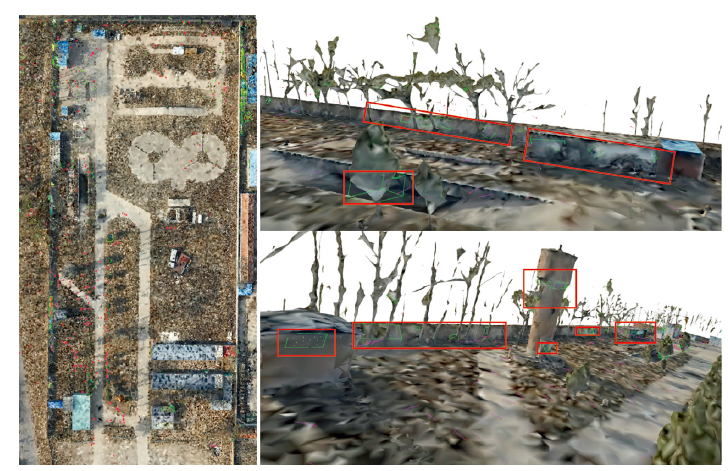
为解决无人机单独采集图像生成三维(3D)重构模型存在破损和孔洞的问题,提出了一种基于无人地面车辆补充采集的3D模型优化方法。该方法耦合基于模型分辨率、三角网格结构和人工选点3种方法提取待优化区域,生成3D包围框和法向量信息,并利用3D重构质量启发式方法生成补充采集视点。 结果表明:在该方法优化下,粗糙3D模型的低质量区域得到了显著改善,模型投影像素尺寸平均减少66%;该方法可以有效提升了3D模型重构质量,为室外大规模精细3D重构领域提供了可靠的解决方案。
中图分类号:
杨东辉, 王昱昊. 基于无人地面车辆补充采集的三维重构模型优化[J]. 汽车安全与节能学报, 2024, 15(5): 650-659.
YANG Donghui, WANG Yuhao. Supplementary capture using unmanned ground vehicle for 3D reconstruction model improvement[J]. Journal of Automotive Safety and Energy, 2024, 15(5): 650-659.




| 变量名称 | 说明 |
|---|---|
| scene | 进行射线检测的场景 |
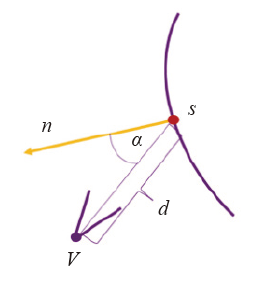
| sample | 目标样本点 |
| normal | 目标样本点法向量 |
| r | 决定候选视点范围的半径 |
| viewpoint_height | 候选视点据地面高度 |
| zmax | 上方障碍检测高度阈值 |
| zmin | 下方障碍检测高度阈值 |
| high_resolution_points | OBB中的高分辨率点集合 |
| α | 相机长度方向视场角 |
| β | 相机宽度方向视场角 |
| 变量名称 | 说明 |
|---|---|
| scene | 进行射线检测的场景 |
| sample | 目标样本点 |
| normal | 目标样本点法向量 |
| r | 决定候选视点范围的半径 |
| viewpoint_height | 候选视点据地面高度 |
| zmax | 上方障碍检测高度阈值 |
| zmin | 下方障碍检测高度阈值 |
| high_resolution_points | OBB中的高分辨率点集合 |
| α | 相机长度方向视场角 |
| β | 相机宽度方向视场角 |
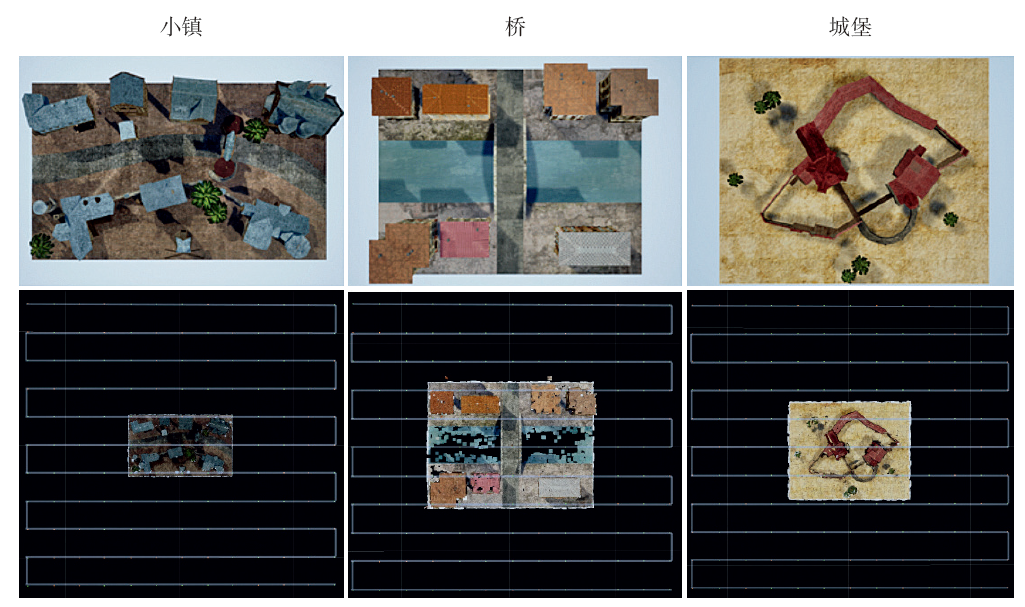
| 场景 | 飞行高度/ cm | 覆盖范围/ cm | 相机类型 | 相机焦距/ mm | 图像分辨率 | 图像数量 |
|---|---|---|---|---|---|---|
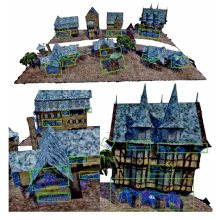
| 小镇 | 7 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |
| 桥 | 6 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |
| 城堡 | 5 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |
| 场景 | 飞行高度/ cm | 覆盖范围/ cm | 相机类型 | 相机焦距/ mm | 图像分辨率 | 图像数量 |
|---|---|---|---|---|---|---|
| 小镇 | 7 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |
| 桥 | 6 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |
| 城堡 | 5 000 | [-10 800, 10 800]*[-10 000, 10 000] | 五目相机 | 20 | 3840×2160 | 715 |

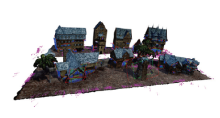
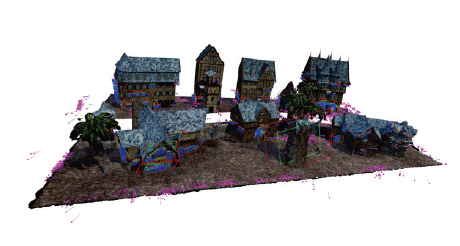
| 场景 | 视角 | 优化前模型 | 优化后模型 | 优化前后平均 投影像素尺寸 | 优化幅度(优化前后之差 占优化前比例) / % |
|---|---|---|---|---|---|
| 小镇 | 正面 视角 | 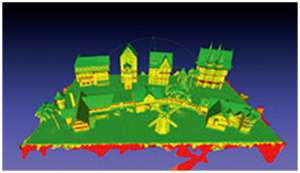 | 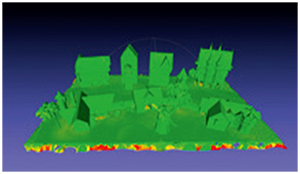 | 2.74→0.73 | 73.5 |
| 侧面 视角 | 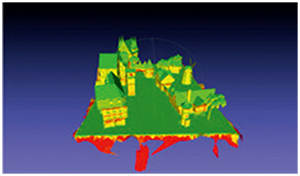 | 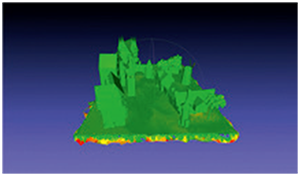 | |||
| 桥 | 正面 视角 | 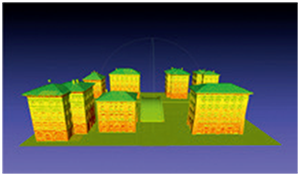 | 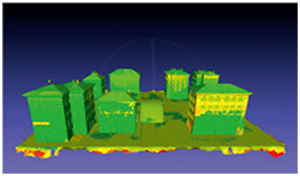 | 2.02→0.86 | 57.4 |
| 侧面 视角 | 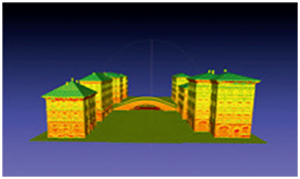 | 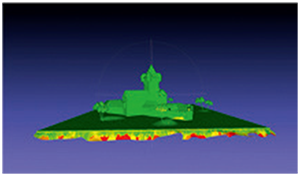 | |||
| 城堡 | 正面 视角 | 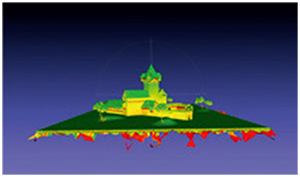 | 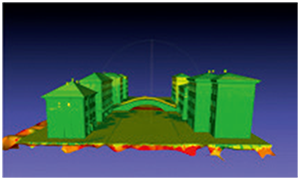 | 2.22→0.83 | 62.4 |
| 侧面 视角 | 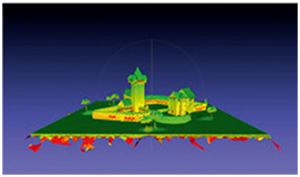 | 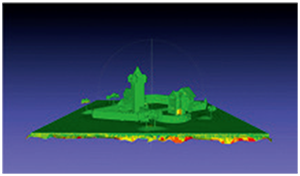 |
| 场景 | 视角 | 优化前模型 | 优化后模型 | 优化前后平均 投影像素尺寸 | 优化幅度(优化前后之差 占优化前比例) / % |
|---|---|---|---|---|---|
| 小镇 | 正面 视角 | | | 2.74→0.73 | 73.5 |
| 侧面 视角 | | | |||
| 桥 | 正面 视角 | | | 2.02→0.86 | 57.4 |
| 侧面 视角 | | | |||
| 城堡 | 正面 视角 | | | 2.22→0.83 | 62.4 |
| 侧面 视角 | | |



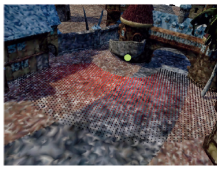
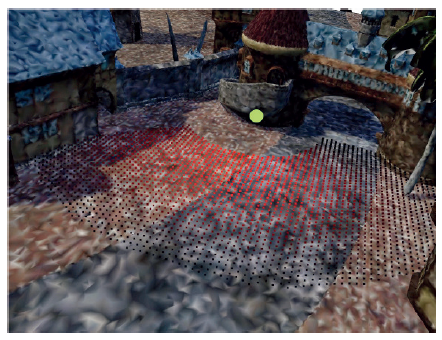
| 场景 | 模型类型 | 优化前模型 | 优化后模型 | 优化前后局部 投影像素尺寸 | 优化幅度(优化前后之差 占优化前比例) / % |
|---|---|---|---|---|---|
| 场景1 | 分辨率 |  |  | 3.22→0.516 | 84.0 |
| 纹理 | 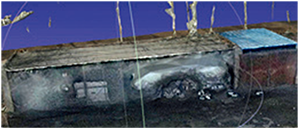 |  | |||
| 场景2 | 分辨率 | 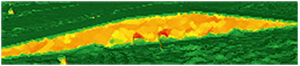 |  | 3.22→1.32 | 59.0 |
| 纹理 |  |  | |||
| 场景3 | 分辨率 | 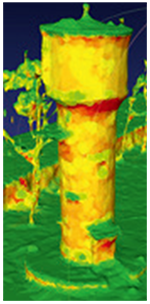 | 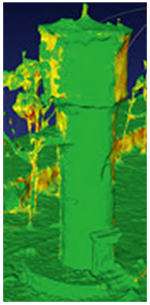 | 3.22→1.27 | 60.6 |
| 纹理 |  |  |
| 场景 | 模型类型 | 优化前模型 | 优化后模型 | 优化前后局部 投影像素尺寸 | 优化幅度(优化前后之差 占优化前比例) / % |
|---|---|---|---|---|---|
| 场景1 | 分辨率 | | | 3.22→0.516 | 84.0 |
| 纹理 | | | |||
| 场景2 | 分辨率 | | | 3.22→1.32 | 59.0 |
| 纹理 | | | |||
| 场景3 | 分辨率 | | | 3.22→1.27 | 60.6 |
| 纹理 | | |
| [1] | 张帆, 黄先锋, 高云龙, 等. 《实景三维中国建设技术大纲(2021版)》 解读与思考[J]. 测绘地理信息, 2021, 46(6): 171-174. |
| ZHANG Fan, HUANG Xianfeng, GAO Yunlong, et al. Interpretation and reflection on Technology Outline of National 3D Real Scene (2021 Edition)[J]. J Geomatics, 2021, 46(6): 171-174. (in Chinese) | |
| [2] | ZHOU Linglong, WU Guoxin, ZUO Yunbo, et al. A comprehensive review of vision-based 3D reconstruction methods[J]. Sensors, 2024, 24(7): 2314-2349. |
| [3] | 龚元夫, 熊忠招, 陈关州, 等. 实景三维模型缺陷修复关键技术[J]. 科学技术与工程, 2024, 24(19): 8339-8345. |
| GONG Yuanfu, XIONG Zhongzhao, CHEN Guanzhou, et al. Key technologies for repairing defect of 3D real scene model[J]. Sci Tech Engi, 2024, 24 (19) : 8339-8345. (in Chinese) | |
| [4] | 陈远芳. 基于倾斜摄影测量与BIM技术的室内外一体化三维场景建模及可视化[D]. 抚州: 东华理工大学, 2023. |
| CHEN Yuanfang. Modeling and visualization of indoor and outdoor integrated scene based on oblique photogrammetry and BIM technology[D]. Fuzhou: East China University of Technology, 2023. (in Chinese) | |
| [5] | 吴晓婧. 三角网格孔洞修补算法研究[D]. 杭州: 浙江工业大学, 2020. |
| WU Xiaojing. Research on hole-filling algorithm for triangular mesh models[D]. Hangzhou: Zhejiang University of Technology, 2019. (in Chinese) | |
| [6] | 王伟, 樊宏周, 席光. 参数曲面三角网格生成的改进波前法[J]. 西安交通大学学报, 2014, 48(3): 61-67. |
| WANG Wei, FAN Hongzhou, XI Guang. A New algorithm for triangular mesh generation by advancing front technique[J]. J Xi'an Jiaotong Univ, 2014, 48(3): 61-67. (in Chinese) | |
| [7] | HUANG Zitian, YU Yikuan, XU Jiawen, et al. PF-Net: Point fractal network for 3D point cloud completion[C/OL]// 2020 IEEE/CVF Conf Comput Visi Patt Recog (CVPR). 2020: 7659-7667. [2023-12-01]. https://openaccess.thecvf.com/content_CVPR_2020/html/Huang_PF-Net_Point_Fractal_Network_for_3D_Point_Cloud_Completion_CVPR_2020_paper.html |
| [8] | WEN Xin, XIANG Peng, HAN Zhizhong, et al. PMP-Net++: Point cloud completion by transformer-enhanced multi-step point moving paths[J]. IEEE Trans Patt Anal Mach Intel, 2023, 45(1): 852-867. |
| [9] | Kaba M D, Uzunbas M G, Lim S N. A reinforcement learning approach to the view planning problem[C]// 2017 IEEE Conf Comput Visi Patt Recog (CVPR). Honolulu,2017: 5094-5102. |
| [10] | Cieslewski T, Kaufmann E, Scaramuzza D. Rapid exploration with multi-rotors: A frontier selection method for high speed flight[C]// 2017 IEEE/RSJ Int'l Conf Intel Robot Syst (IROS). Vancouver, BC, IEEE, 2017: 2135-2142. |
| [11] | Koch T, Körner M, Fraundorfer F. Automatic and semantically-aware 3D UAV flight planning for image-based 3D reconstruction[J]. Remote Sensing, 2019, 11(13): 1550-1579. |
| [12] | Obwald S, Bennewitz M, Burgard W, et al. Speeding-up robot exploration by exploiting background information[J]. IEEE Robot Auto Letts, 2016, 1(2): 716-723. |
| [13] | Mostegel C, Rumpler M, Fraundorfer F, et al. UAV-based autonomous image acquisition with multi-view stereo quality assurance by confidence prediction[C]// 2016 IEEE Conf Comput Visi Patt Recog Workshop (CVPRW). Las Vegas, 2016: 1-10. |
| [14] | ZHANG Shuhang, LIU Chun, Haala N. Three-dimensional path planning of uavs imaging for photogrammetric reconstruction[C]// ISPRS Annal Photogram, Remo Sens Spat Info Sci, Nice, 2020, 1: 325-331. |
| [15] | PENG Cheng, Isler V. Adaptive view planning for aerial 3D reconstruction[C]// 2019 Int'l Conf Robot Auto (ICRA). Montreal, 2019: 2981-2987. |
| [16] | Smith N, Moehrle N, Goesele M, et al. Aerial path planning for urban scene reconstruction: A continuous optimization method and benchmark[J]. ACM Trans Graph, 2018, 37(6): 1-15. |
| [17] | LIN Liqiang, LIU Yilin, HU Yue, et al. Capturing, reconstructing, and simulating: The urbanscene3D dataset[C]// ECCV 2022. Cham: Springer Nature Switzerland, 2022: 93-103. |
| [18] | Maboudi M, Homaei M, Song S, et al. A Review on viewpoints and path planning for UAV-based 3-D reconstruction[J]. IEEE J Select Top Appl Earth Obser Remo Sens, 2023, 16: 5026-5048. |
| [19] | 戴维. 三维封闭三角网格模型中的孔洞修补算法研究与实现[D]. 南京: 南京大学, 2018. |
| DAI Wei. Research and implementation of hole repair algorithm in 3D closed triangle mesh model[D]. Nanjing: Nanjing University, 2018. (in Chinese) | |
| [20] | Schubert E, Sander J, Ester M, et al. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN[J]. ACM Trans Data Syst, 2017, 42(3): 1-21. |
| [21] | 徐杰. 基于3D视觉技术的堆叠工件位姿估计研究[D]. 哈尔滨: 哈尔滨工业大学, 2022. |
| XU Jie. Research on pose estimation of stacked workpieces based on 3D vision technology[D]. Harbin: Harbin Institute of Technology, 2021. (in Chinese) | |
| [22] | WANG Feng, ZOU Yang, et al.Del Rey Castillo E, Automated UAV path-planning for high-quality photogrammetric 3D bridge reconstruction[J]. Struct Infrast Engi, 2022, 20(10): 1-20. |
| [23] | ZHOU Xiaohui, XIE Ke, HUANG Kai, et al. Offsite aerial path planning for efficient urban scene reconstruction[J]. ACM Trans Graph, 2020, 39(6): 1-16. |
| [1] | 彭千龙, 金别树, 王建强, 王广玮. 考虑车道约束的骨架引导分层自主代客泊车路径规划方法[J]. 汽车安全与节能学报, 2025, 16(5): 784-792. |
| [2] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||