欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2021, Vol. 12 ›› Issue (1): 52-61.DOI: 10.3969/j.issn.1674-8484.2021.01.005
杜茂( ), 杨林*(), 金悦, 涂家毓
), 杨林*(), 金悦, 涂家毓
收稿日期:2020-11-11
出版日期:2021-03-31
发布日期:2021-04-02
通讯作者:
杨林
作者简介:*杨林,教授。E-mail: yanglin@sjtu.edu.cn。基金资助:
DU Mao(), YANG Lin*(), JIN Yue, TU Jiayu
Received:2020-11-11
Online:2021-03-31
Published:2021-04-02
Contact:
YANG Lin
摘要:
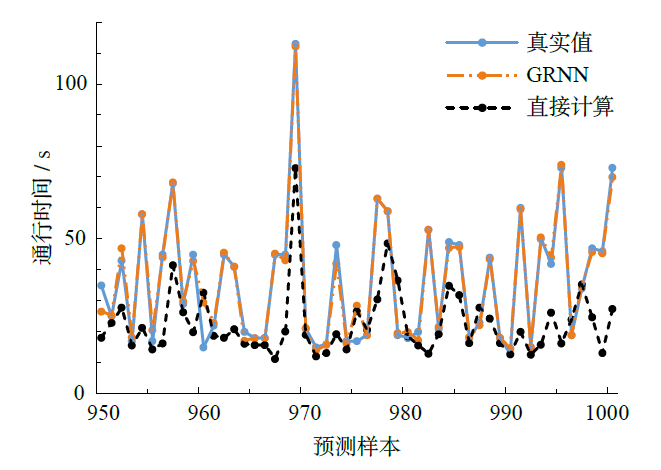
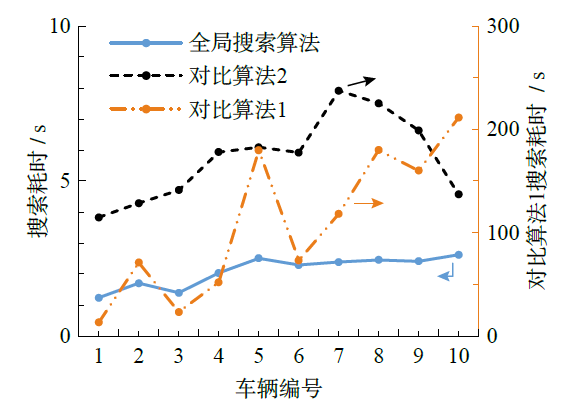
为降低混合动力汽车(HEV)的出行时间和出行能耗,提出了一种基于时空动态交通信息的路径规划算法。分析了影响车辆通行时间和全程最低能耗的因素。一种基于广义回归网络 (GRNN)模型,拟合计算了道路通行时间以及整体路径的全程能耗。构建了基于并行A*算法的车辆路径规划算法,为确定起终点位置后的车辆,规划了一条耗时更短、 更加节能的路径。进行了仿真对比试验。结果表明:相比于依据平均车速与道路功率的计算方法,该算法能够获得更优的出行路径,可降低车辆能耗11%以上,缩短行车时间13%以上。因而,该算法可为车辆规划更优的路径。
中图分类号:
杜茂, 杨林, 金悦, 涂家毓. 基于交通时空特征的车辆全局路径规划算法[J]. 汽车安全与节能学报, 2021, 12(1): 52-61.
DU Mao, YANG Lin, JIN Yue, TU Jiayu. Vehicle global path planning algorithm based on spatio-temporal characteristics of traffic[J]. Journal of Automotive Safety and Energy, 2021, 12(1): 52-61.

| 平均车速 | -0.42 | |
|---|---|---|
| 车辆密度 | ρi,t | 0.64 |
| 道路长度 | li | 0.18 |
| 非绿灯的时长 | ri,t | 0.08 |
| 路口长度 | γi | 0.11 |
| 通行功率 | ēi,t | -0.38 |
| 预估通行时长 | τi, t | 0.18 |
| 下一道路j的平均车速 | vj,t' | -0.29 |
| 下一道路j的车辆密度 | ρj,t' | 0.51 |
| 绿灯时长 | ji,t | -0.1 |
| 平均车速 | -0.42 | |
|---|---|---|
| 车辆密度 | ρi,t | 0.64 |
| 道路长度 | li | 0.18 |
| 非绿灯的时长 | ri,t | 0.08 |
| 路口长度 | γi | 0.11 |
| 通行功率 | ēi,t | -0.38 |
| 预估通行时长 | τi, t | 0.18 |
| 下一道路j的平均车速 | vj,t' | -0.29 |
| 下一道路j的车辆密度 | ρj,t' | 0.51 |
| 绿灯时长 | ji,t | -0.1 |
| ID | ρi,t | li | ri,t | gi,t | τi, t | ēi,t | ρj,t' | γi | RE/% | MAE/s | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 10.39 | 2.95 |
| 2 | √ | √ | √ | √ | √ | √ | √ | √ | 8.66 | 2.59 | ||
| 3 | √ | √ | √ | √ | √ | √ | √ | 8.60 | 2.51 | |||
| 4 | √ | √ | √ | √ | √ | √ | 8.97 | 2.65 | ||||
| 5 | √ | √ | √ | √ | √ | 8.97 | 2.66 | |||||
| 6 | √ | √ | √ | √ | √ | √ | √ | 9.68 | 2.78 | |||
| 7 | √ | √ | √ | √ | √ | √ | √ | √ | 10.01 | 2.87 | ||
| 8 | √ | √ | √ | √ | √ | √ | 8.71 | 2.64 |
| ID | ρi,t | li | ri,t | gi,t | τi, t | ēi,t | ρj,t' | γi | RE/% | MAE/s | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | √ | √ | √ | √ | √ | √ | √ | √ | √ | √ | 10.39 | 2.95 |
| 2 | √ | √ | √ | √ | √ | √ | √ | √ | 8.66 | 2.59 | ||
| 3 | √ | √ | √ | √ | √ | √ | √ | 8.60 | 2.51 | |||
| 4 | √ | √ | √ | √ | √ | √ | 8.97 | 2.65 | ||||
| 5 | √ | √ | √ | √ | √ | 8.97 | 2.66 | |||||
| 6 | √ | √ | √ | √ | √ | √ | √ | 9.68 | 2.78 | |||
| 7 | √ | √ | √ | √ | √ | √ | √ | √ | 10.01 | 2.87 | ||
| 8 | √ | √ | √ | √ | √ | √ | 8.71 | 2.64 |
| 关联性 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| DP油耗 | 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | 参数8 | |
| DP油耗 | 1.00 | 0.90 | 0.63 | 0.44 | 0.66 | -0.37 | 0.58 | 0.34 | -0.46 |
| 参数1 | 0.90 | 1.00 | 0.92 | 0.30 | 0.83 | -0.16 | 0.46 | 0.18 | -0.25 |
| 参数2 | 0.63 | 0.92 | 1.00 | 0.61 | 0.62 | -0.37 | 0.75 | 0.51 | -0.49 |
| 参数3 | 0.44 | 0.30 | 0.61 | 1.00 | -0.14 | -0.57 | 0.80 | 0.86 | -0.73 |
| 参数4 | 0.66 | 0.83 | 0.62 | -0.14 | 1.00 | 0.35 | 0.06 | -0.22 | 0.28 |
| 参数5 | -0.37 | -0.16 | -0.37 | -0.57 | 0.35 | 1.00 | -0.64 | -0.68 | 0.95 |
| 参数6 | 0.58 | 0.46 | 0.75 | 0.80 | 0.06 | -0.64 | 1.00 | 0.92 | -0.69 |
| 参数7 | 0.34 | 0.18 | 0.51 | 0.86 | -0.22 | -0.68 | 0.92 | 1.00 | -0.73 |
| 参数8 | -0.46 | -0.25 | -0.49 | -0.73 | 0.28 | 0.95 | -0.69 | -0.73 | 1.00 |
| 关联性 | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| DP油耗 | 参数1 | 参数2 | 参数3 | 参数4 | 参数5 | 参数6 | 参数7 | 参数8 | |
| DP油耗 | 1.00 | 0.90 | 0.63 | 0.44 | 0.66 | -0.37 | 0.58 | 0.34 | -0.46 |
| 参数1 | 0.90 | 1.00 | 0.92 | 0.30 | 0.83 | -0.16 | 0.46 | 0.18 | -0.25 |
| 参数2 | 0.63 | 0.92 | 1.00 | 0.61 | 0.62 | -0.37 | 0.75 | 0.51 | -0.49 |
| 参数3 | 0.44 | 0.30 | 0.61 | 1.00 | -0.14 | -0.57 | 0.80 | 0.86 | -0.73 |
| 参数4 | 0.66 | 0.83 | 0.62 | -0.14 | 1.00 | 0.35 | 0.06 | -0.22 | 0.28 |
| 参数5 | -0.37 | -0.16 | -0.37 | -0.57 | 0.35 | 1.00 | -0.64 | -0.68 | 0.95 |
| 参数6 | 0.58 | 0.46 | 0.75 | 0.80 | 0.06 | -0.64 | 1.00 | 0.92 | -0.69 |
| 参数7 | 0.34 | 0.18 | 0.51 | 0.86 | -0.22 | -0.68 | 0.92 | 1.00 | -0.73 |
| 参数8 | -0.46 | -0.25 | -0.49 | -0.73 | 0.28 | 0.95 | -0.69 | -0.73 | 1.00 |

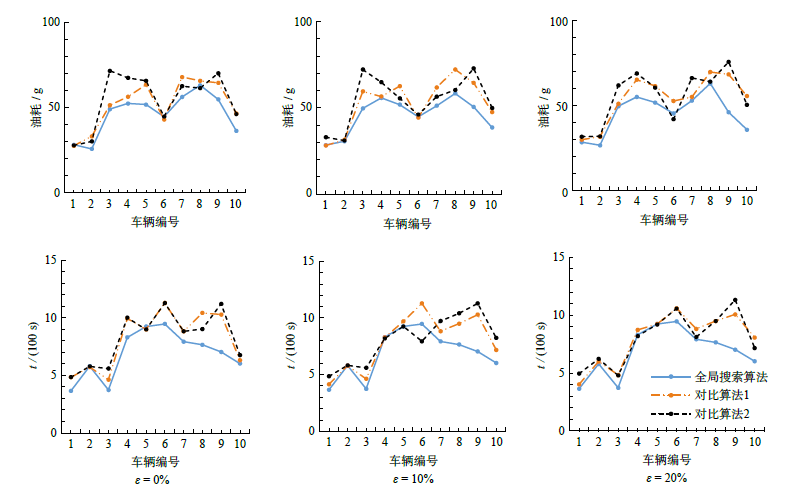
| ε / % | 能耗下降/% | 行程时间下降/% | |||
|---|---|---|---|---|---|
| 相比算法1 | 相比算法2 | 相比算法1 | 相比算法2 | ||
| 0 | 10.48 | 13.96 | 14.49 | 16.12 | |
| 10 | 11.25 | 13.55 | 12.86 | 14.69 | |
| 15 | 8.76 | 10.57 | 13.63 | 16.71 | |
| 20 | 15.16 | 16.42 | 13.65 | 14.02 | |
| 平均 | 11.41 | 13.63 | 13.66 | 15.39 | |
| ε / % | 能耗下降/% | 行程时间下降/% | |||
|---|---|---|---|---|---|
| 相比算法1 | 相比算法2 | 相比算法1 | 相比算法2 | ||
| 0 | 10.48 | 13.96 | 14.49 | 16.12 | |
| 10 | 11.25 | 13.55 | 12.86 | 14.69 | |
| 15 | 8.76 | 10.57 | 13.63 | 16.71 | |
| 20 | 15.16 | 16.42 | 13.65 | 14.02 | |
| 平均 | 11.41 | 13.63 | 13.66 | 15.39 | |
| [1] | 李阳. 需求不确定的车辆路径问题模型与算法研究[D]. 大连:大连海事大学, 2018. |
| LI Yang. Optimization models and algorithms of vehicle routing problem under uncertain demands[D]. Dalian: Dalian Maritime University, 2018. (in Chinese) | |
| [2] | SONG Meixian, LI Junqing, HAN Yunqi, et al. Metaheuristics for solving the vehicle routing problem with the time windows and energy consumption in cold chain logistics[J]. Appl Soft Computing, 2020,95:178-190. |
| [3] | Karakatič S. Optimizing nonlinear charging times of electric vehicle routing with genetic algorithm[J]. Expert Sys Appl, 2021,164:356-371. |
| [4] | Losa J, Schulte F Spaan M T J, et al. The value of information sharing for platform-based collaborative vehicle routing[J]. Transp Res Part E: Logistics Transp Rev, 2020,141:145-160. |
| [5] | 张照生. 交通约束下的行车最优路径规划[D]. 北京:清华大学, 2013. |
| ZHANG Zhaosheng. Optimum vehicular path planning under traffic restriction[D]. Beijing: Tsinghua University, 2013. (in Chinese) | |
| [6] | CHEN Dawei, PAN Shuangli, CHEN Qun, et al. Vehicle routing problem of contactless joint distribution service during COVID-19 pandemic[J]. Transp Res Interdisciplinary Perspectives, 2020,8:225-241. |
| [7] | Gmira M, Gendreau M, Lodi A, Potvin J Y. Tabu search for the time-dependent vehicle routing problem with time windows on a road network[J]. Euro J Operational Res, 2021,288:129-140. |
| [8] | Stellingwerf H, Groeneveld L, Laporte G, et al. The quality-driven vehicle routing problem: Model and application to a case of cooperative logistics[J]. Int’l J Production Economics, 2020,231:107-122. |
| [9] | LU Ji, CHEN Yuning, HAO Jinkao, HE Renjie. The time-dependent electric vehicle routing problem: Model and solution[J]. Expert Syst Appl, 2020,61:331-346. |
| [10] | 张静. 面向路径规划的导航路网数据模型研究[D]. 北京:中国矿业大学, 2009. |
| ZHANG Jing. Research on navigation network data model for route planning[D]. Beijing: China University of Mining and Technology, 2009. (in Chinese) | |
| [11] | 杨易. 智能车辆组合定位与路径导航技术研究[D]. 长沙:湖南大学, 2006. |
| YANG Yi. Research on technologies of intelligent vehicle integrated location and route navigation[D]. Changsha: Hunan University, 2006. ( in Chinese) | |
| [12] | CHEN Ning, ZHANG Yun. Energy consumption model of urban transportation based on road network capacity[C]// Asia-Pacific Power and Energy Eng Conf, Chengdu, China, 2010,1:1-4. |
| [13] | Ranacher P, Brunauer R, van der Spek S, et al. A model to estimate and interpret the energy-efficiency of movement patterns in urban road traffic[J]. Computers, Envi Urban Syst, 2016,59:152-163. |
| [14] | GUO Chenjuan, YANG Bin, Andersen O, et al. EcoMark 2.0: Empowering eco-routing with vehicular environmental models and actual vehicle fuel consumption data[J]. Geoinfo, 2015,19:567-599. |
| [15] | Kropiwnicki J. A unified approach to the analysis of electric energy and fuel consumption of cars in city traffic[J]. Energy, 2019,182:1045-1057. |
| [16] | LIU Chenglin, WANG Jianqiang, CAI Wenjuan, et al. An energy-efficient dynamic route optimization algorithm for connected and automated vehicles using velocity-space-time networks[J]. IEEE Access, 2019,7:108866-108877. |
| [17] | Krajzewicz D, Erdmann J, Behrisch M, et al. Recent development and applications of SUMO - simulation of urban mobility[J]. Int’l J Adv Syst Meas, 2012,5:128-138. |
| [18] | Celtek S A, Durdu A, Alı M E M. Real-time traffic signal control with swarm optimization methods[J] Measurement, 2020,166:108-122. |
| [19] | San José R, Pérez J L, Gonzalez-Barras R M. Assessment of mesoscale and microscale simulations of a NO2 episode supported by traffic modelling at microscopic level[J]. Sci Total Envir, 2021,752:141-160. |
| [20] | ZHANG Zhengchao, LI Meng, LIN Xi, et al. Multistep speed prediction on traffic networks: A graph convolutional sequence-to-sequence learning approach with attention mechanism[J]. Transp Res Part C: Emerging Tech, 2019,105:297-322. |
| [21] | ZHOU Wei, YANG Lin, CAI Yishan, et al. Dynamic programming for new energy vehicles based on their work modes part I: Electric vehicles and hybrid electric vehicles[J]. J Power Sources, 2018,406:151-166. |
| [1] | 王越, 段宏伟, 钟薇, 杨路, 何雷, 柴福来, 石晓杨. 融合GoT-SAC的领航—跟随式多车编队路径规划方法[J]. 汽车安全与节能学报, 2026, 17(1): 122-129. |
| [2] | 杨宗儒, 胡韫泽, 刘士琪, 关阳, 吴伟, 刘畅. 停车占位状态估计的分布式主动感知的路径规划[J]. 汽车安全与节能学报, 2026, 17(1): 140-148. |
| [3] | 张炳力, 张智森, 张羊阳, 刘安, 许永华. 基于GA优化与路径扩展启发式采样的BI-RRT*路径规划方法[J]. 汽车安全与节能学报, 2025, 16(6): 923-933. |
| [4] | 彭千龙, 金别树, 王建强, 王广玮. 考虑车道约束的骨架引导分层自主代客泊车路径规划方法[J]. 汽车安全与节能学报, 2025, 16(5): 784-792. |
| [5] | 李舜酩, 王昌荣, 史文贝. 光储充移动式充电机器人研发综述[J]. 汽车安全与节能学报, 2025, 16(4): 505-520. |
| [6] | 于谦, 郭圆圆, 杨鸣鹏, 张玉婷. 基于跟驰对的CO2排放特性的生态车辆跟驰策略[J]. 汽车安全与节能学报, 2025, 16(4): 577-586. |
| [7] | 陈晓峰, 王兰文, 马果, 张垒, 鲍家定, 景晖. 考虑能耗及稳定性的无人驾驶车辆越野环境路径规划[J]. 汽车安全与节能学报, 2025, 16(3): 496-503. |
| [8] | 匡兴红, 沈佳成. 改进北方苍鹰算法及其在智能汽车路径规划中的应用[J]. 汽车安全与节能学报, 2025, 16(1): 148-158. |
| [9] | 张富椿, 尹燕莉, 马永娟, 肖杭洋, 陈海鑫, 余凯. 网联混合动力汽车队列的生态驾驶与能量管理分层控制[J]. 汽车安全与节能学报, 2025, 16(1): 159-169. |
| [10] | 黄郑, 王红星, 杜彪, 高嵩, 高峰. 基于固定机巢的输变配无人机智能巡检方法[J]. 汽车安全与节能学报, 2024, 15(5): 670-679. |
| [11] | 黄晨, 贾丁鹏, 孙晓强, 许庆. 基于周边车辆轨迹预测的智能汽车路径规划[J]. 汽车安全与节能学报, 2024, 15(5): 753-762. |
| [12] | 李玉龙, 谢辉, 宋康. 无人驾驶公交车基于循迹误差观测和目标测量误差观测的避障路径规划算法[J]. 汽车安全与节能学报, 2024, 15(4): 579-590. |
| [13] | 孟庆京, 司俊德, 张新钰, 孙弘麟, 王小宇, 荣松松. 基于图搜索的陆空两栖平台3D路径规划算法[J]. 汽车安全与节能学报, 2024, 15(2): 253-260. |
| [14] | 李文礼, 任勇鹏, 肖凯文, 孙圆圆. 行人过街模拟及车辆右转避障路径规划方法[J]. 汽车安全与节能学报, 2024, 15(1): 99-110. |
| [15] | 罗闯, 许亮. 基于ISSA的燃料电池多电源模糊能量管理策略[J]. 汽车安全与节能学报, 2023, 14(4): 496-504. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||