欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2026, Vol. 17 ›› Issue (1): 1-17.DOI: 10.3969/j.issn.1674-8484.2026.01.001
• 综述与展望 • 下一篇
袁宏1,2( ), 黄开胜1,2, 田光宇1,*()
), 黄开胜1,2, 田光宇1,*()
收稿日期:2025-11-11
修回日期:2026-01-14
出版日期:2026-02-28
发布日期:2026-03-19
通讯作者:
田光宇,教授。E-mail:tiangy@tsinghua.edu.cn。作者简介:袁宏(1974—),女(汉),北京,高级工程师。E-mail:yuanhong611@mail.tsinghua.edu.cn。
基金资助:
YUAN Hong1,2(), HUANG Kaisheng1,2, TIAN Guangyu1,*()
Received:2025-11-11
Revised:2026-01-14
Online:2026-02-28
Published:2026-03-19
Contact:
Prof. Tian Guangyu摘要:
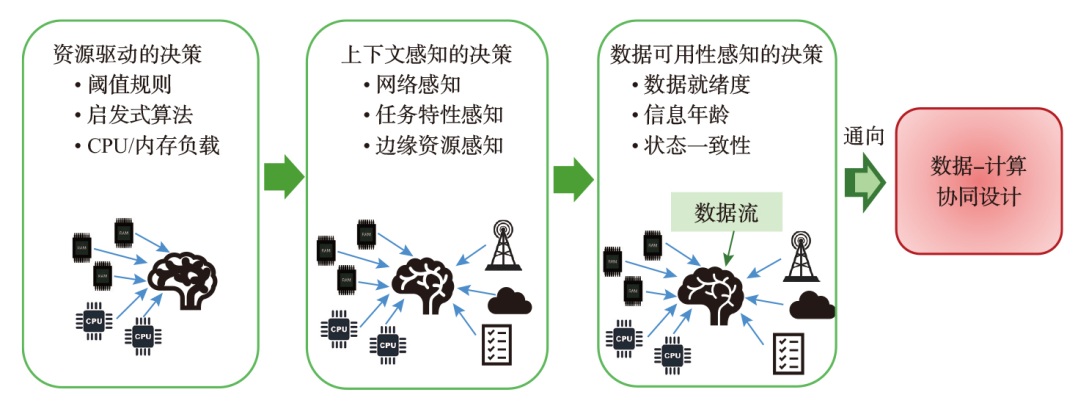
智能汽车信息物理系统(IVCPS)是突破单车智能局限的关键,但其性能受限于海量数据需求与动态稀缺的通信计算资源间的冲突,而该冲突源于数据流调度与计算任务调度间的强耦合关系。现有研究多采用独立优化二者的解耦方法,忽视了由此引发的系统性性能瓶颈,且缺乏一个综合性的数据-计算协同设计框架。因此,该文系统性地梳理了IVCPS中从资源驱动的独立优化到任务驱动的一体化协同这一调度范式的转变;深入剖析了从显式协调到隐式融合的协同机制演进路径,尤其是在应用多智能体系统强化学习解决分布式资源冲突及保障人工智能(AI)决策可信度方面,识别出未来的关键研究方向。该研究旨在为异构多体交互协同中数据-计算协同调度这一核心问题建立清晰的理论框架,为下一代高级别自动驾驶与智能交通系统的架构设计提供关键的理论和技术支撑。
中图分类号:
袁宏, 黄开胜, 田光宇. 从解耦到协同:智能网联汽车数据与计算调度范式演进[J]. 汽车安全与节能学报, 2026, 17(1): 1-17.
YUAN Hong, HUANG Kaisheng, TIAN Guangyu. From decoupling to synergy: A paradigm shift in data and computation co-scheduling for intelligent connected vehicles[J]. Journal of Automotive Safety and Energy, 2026, 17(1): 1-17.


| 类别 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术 |
|---|---|---|---|---|
| 静态/准静态策略 | 采用固定的周期或查询模式传输 | 简单、确定性高、开销极低 | 适应性差、资源效率低下 | 周期性更新 (time-triggered) |
| 自适应触发机制 | 基于预设规则 (事件/状态偏差) 动态触发 | 响应快、资源效率较高 | 依赖阈值/模型、适应性有限 | 事件/状态驱动 (event/state-driven) |
| 基于优化的策略 | 将调度问题形式化为数学模型并求解 | 理论性强、性能有界。 | 计算复杂度高、实时性差、依赖精确模型 | 动态规划(DP),Lyapunov优化 |
| 基于学习的策略 | 通过与环境交互学习最优策略,无需精确模型 | 适应性强、性能上限高 | 训练复杂、样本依赖、可解释性差 | 深度强化学习(DRL),联邦学习(FL) |
| 类别 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术 |
|---|---|---|---|---|
| 静态/准静态策略 | 采用固定的周期或查询模式传输 | 简单、确定性高、开销极低 | 适应性差、资源效率低下 | 周期性更新 (time-triggered) |
| 自适应触发机制 | 基于预设规则 (事件/状态偏差) 动态触发 | 响应快、资源效率较高 | 依赖阈值/模型、适应性有限 | 事件/状态驱动 (event/state-driven) |
| 基于优化的策略 | 将调度问题形式化为数学模型并求解 | 理论性强、性能有界。 | 计算复杂度高、实时性差、依赖精确模型 | 动态规划(DP),Lyapunov优化 |
| 基于学习的策略 | 通过与环境交互学习最优策略,无需精确模型 | 适应性强、性能上限高 | 训练复杂、样本依赖、可解释性差 | 深度强化学习(DRL),联邦学习(FL) |
| 对比维度 | 事件驱动 (Event-driven) 调度 | 状态驱动 (State-driven) 调度 |
|---|---|---|
| 核心原理 | 基于预定义的离散事件来触发数据传输;当系统状态或外部环境满足特定条件(如超过阈值)时产生事件 | 基于对连续系统状态的预测值与实际观测值之间的偏差来触发数据传输;当预测误差超过阈值时进行更新 |
| 决策依据 | 离散的、逻辑性的事件判断 (是/否) | 连续的状态误差量 |
| 优点 | 对关键事件响应直接;逻辑简单,易于实现;计算开销低。 | 性能可控,可精确平衡性能与开销;理论性强,与控制理论结合紧密;对周期性信号友好,能有效减少冗余传输 |
| 缺点 | 性能依赖阈值设定;适应性有限,难以应对未定义场景;可能产生Zeno行为(Zeno behavior) | 效果依赖预测模型精度;计算开销较高;对突发事件响应可能存在滞后 |
| 适用场景 | 安全关键型、强逻辑性的场景,如碰撞预警、交通信号灯状态变化、队列稳定性破坏等 | 状态连续演化、可预测性较强的场景,如平稳跟车、高精度定位更新、交通流状态估计等 |
| 代表性文献或算法 | WANG Yan,et al[ | Kalman filter-based prediction [ |
| 对比维度 | 事件驱动 (Event-driven) 调度 | 状态驱动 (State-driven) 调度 |
|---|---|---|
| 核心原理 | 基于预定义的离散事件来触发数据传输;当系统状态或外部环境满足特定条件(如超过阈值)时产生事件 | 基于对连续系统状态的预测值与实际观测值之间的偏差来触发数据传输;当预测误差超过阈值时进行更新 |
| 决策依据 | 离散的、逻辑性的事件判断 (是/否) | 连续的状态误差量 |
| 优点 | 对关键事件响应直接;逻辑简单,易于实现;计算开销低。 | 性能可控,可精确平衡性能与开销;理论性强,与控制理论结合紧密;对周期性信号友好,能有效减少冗余传输 |
| 缺点 | 性能依赖阈值设定;适应性有限,难以应对未定义场景;可能产生Zeno行为(Zeno behavior) | 效果依赖预测模型精度;计算开销较高;对突发事件响应可能存在滞后 |
| 适用场景 | 安全关键型、强逻辑性的场景,如碰撞预警、交通信号灯状态变化、队列稳定性破坏等 | 状态连续演化、可预测性较强的场景,如平稳跟车、高精度定位更新、交通流状态估计等 |
| 代表性文献或算法 | WANG Yan,et al[ | Kalman filter-based prediction [ |


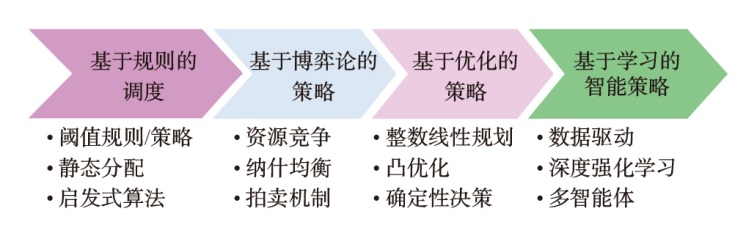
| 算法类别 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术/文献 |
|---|---|---|---|---|
| 启发式/基于规则 | 设计固定的规则 (如阈值)或贪心策略进行快速决策 | 设计固定的规则 (如阈值) 或贪心策略进行快速决策。 | 解决方案通常是次优的、缺乏对环境动态变化的适应性 | 阈值法[ |
| 博弈论 | 将车辆与边缘节点间的资源竞争建模为博弈过程,寻找均衡解 | 理论框架成熟,适用于多用户竞争场景的建模 | 依赖理想化假设、信令开销大、收敛慢、实时性差 | Nash均衡 (Nash Equilibrium)[ |
| 传统数学优化 | 将问题形式化为精确的数学规划模型 (如ILP/MINLP) 并求解 | 可提供理论最优解,性能有上界保证 | 计算复杂度极高(通常NP-hard)、不适用于实时大规模系统 | 整数线性规划 (ILP) [ |
| 机器学习(DRL) | 通过与环境交互学习一个从状态到动作的最优策略,无需精确模型 | 自适应性强、模型无关、能处理高维复杂问题 | 训练过程复杂耗时、奖励函数设计困难、可解释性弱 | DQN[ |
| 算法类别 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术/文献 |
|---|---|---|---|---|
| 启发式/基于规则 | 设计固定的规则 (如阈值)或贪心策略进行快速决策 | 设计固定的规则 (如阈值) 或贪心策略进行快速决策。 | 解决方案通常是次优的、缺乏对环境动态变化的适应性 | 阈值法[ |
| 博弈论 | 将车辆与边缘节点间的资源竞争建模为博弈过程,寻找均衡解 | 理论框架成熟,适用于多用户竞争场景的建模 | 依赖理想化假设、信令开销大、收敛慢、实时性差 | Nash均衡 (Nash Equilibrium)[ |
| 传统数学优化 | 将问题形式化为精确的数学规划模型 (如ILP/MINLP) 并求解 | 可提供理论最优解,性能有上界保证 | 计算复杂度极高(通常NP-hard)、不适用于实时大规模系统 | 整数线性规划 (ILP) [ |
| 机器学习(DRL) | 通过与环境交互学习一个从状态到动作的最优策略,无需精确模型 | 自适应性强、模型无关、能处理高维复杂问题 | 训练过程复杂耗时、奖励函数设计困难、可解释性弱 | DQN[ |
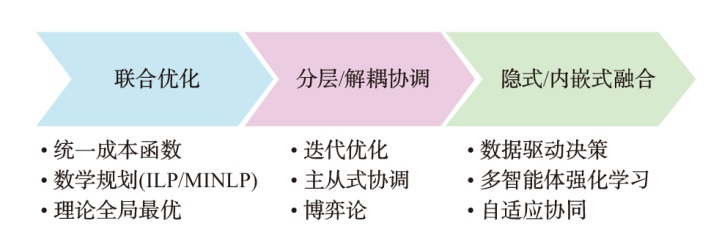
| 协同机制 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术 |
|---|---|---|---|---|
| 联合优化 | 将协同问题建模为单一的全局优化问题 | 理论上可达全局最优,目标明确 | 模型复杂度高,求解困难,难以实时适应动态环境 | 混合整数规划[ |
| 分层/解耦协调 | 模块解耦,通过显性的信息交互或协商达成协同 | 降低了模型复杂度,更易于实现和扩展 | 协调开销大,可能收敛于次优解,响应速度慢 | 迭代优化 [ |
| 隐式/内嵌式融合 | 将协同逻辑内嵌于各能体的决策过程中,无显式协调 | 响应速度快,通信开销低,自适应性强 | 理论分析困难,“黑盒”特性导致可解释性差 | MARL、分布式DRL[ |
| 协同机制 | 核心思想 | 主要优点 | 主要缺点 | 代表性技术 |
|---|---|---|---|---|
| 联合优化 | 将协同问题建模为单一的全局优化问题 | 理论上可达全局最优,目标明确 | 模型复杂度高,求解困难,难以实时适应动态环境 | 混合整数规划[ |
| 分层/解耦协调 | 模块解耦,通过显性的信息交互或协商达成协同 | 降低了模型复杂度,更易于实现和扩展 | 协调开销大,可能收敛于次优解,响应速度慢 | 迭代优化 [ |
| 隐式/内嵌式融合 | 将协同逻辑内嵌于各能体的决策过程中,无显式协调 | 响应速度快,通信开销低,自适应性强 | 理论分析困难,“黑盒”特性导致可解释性差 | MARL、分布式DRL[ |

| [1] |
Yusuf S A, Khan A, Souissi R.Vehicle-to-everything (V2X) in the autonomous vehicles domain:A technical review of communication, sensor, and AI technologies for road user safety[J]. Transport Res Interdiscip Perspect, 2024, 23:100980.
doi: 10.1016/j.trip.2023.100980 URL |
| [2] | XU Chen, WANG Gang, WEI Mingzhu, et al.Intelligent transportation vehicle road collaboration and task scheduling based on deep learning in augmented internet of things[J]. IEEE Trans Vehi Tech, 2025, 74(2):2198-2209. |
| [3] | 工业和信息化部,公安部,自然资源部,等.工信部联通装[2023]268号: 五部委关于开展智能网联汽车“车路云一体化”应用试点工作的通知[A/OL]. 2024. (2024-01-17)https://www.miit.gov.cn/jgsj/zbys/wjfb/art/2024/art_140d86b63e494628ae039dd23a3cc539.html. |
| Ministry of Industry and Information Technology, Ministry of Public Security, Ministry of Natural Resources,et al.Gong Xin Bu Lian Tong Zhuang〔2023〕No. 268: Circular of the five ministries and commissions on launching the pilot work of “ Vehicle-Road-Cloud Integration” application for intelligent connected vehicles[A/OL]. 2024. (2024-01-17)https://www.miit.gov.cn/jgsj/zbys/wjfb/art/2024/art_140d86b63e494628ae039dd23a3cc539.html.(in Chinese) | |
| [4] |
李克强, 常雪阳, 李家文, 等.智能网联汽车云控系统及其实现[J]. 汽车工程, 2020, 42(12):1595-1605, 11.
doi: 10.19562/j.chinasae.qcgc.2020.12.001 |
| LI Keqiang,CHANG Xueyang,LI Jiawen,et al.Cloud control system for intelligent and connected vehicles and its application[J]. Autom Engineering, 2020, 42(12):1595-1605,11.(in Chinese) | |
| [5] | WU Qiong, WANG Wenhua, FAN Pingyi, et al.URLLC-Awared resource allocation for heterogeneous vehicular edge computing[J]. IEEE Trans Vehi Tech, 2024, 73(8):11789-11805. |
| [6] | YUAN Weijie, ZOU Jiaqi, CUI Yuanhao, et al.Orthogonal time frequency space and predictive beamforming-enabled URLLC in vehicular networks[J]. IEEE Wirel Commun, 2023, 30(2):56-62. |
| [7] | LIU Shaoshan, YU Bo, TANG Jie, et al.Communication challenges in infrastructure-vehicle cooperative autonomous driving: A field deployment perspective[J]. IEEE Wirel Commun, 2022, 29(4):126-131. |
| [8] | Berri S, ZHANG Jun, Bensaou B, et al.Joint Content-prefetching, transmission scheduling, and rate adaptation in vehicular networks[J]. IEEE Trans Vehi Tech, 2022, 71(4):4348-4358. |
| [9] |
LU Sidi, SHI Weisong.Vehicle as a mobile computing platform: Opportunities and challenges[J]. IEEE Netw, 2024, 38(6):493-500.
doi: 10.1109/MNET.2023.3319454 URL |
| [10] | LI Yalong, LIN Yangfei, ZHONG Lei, et al.Boosting rare scenario perception in autonomous driving: An adaptive approach with MoEs and LoRA[J]. IEEE IoT-J, 2025, 12(5):4872-4887. |
| [11] | Pyun B, Seo M, Kim S, et al.Development of an autonomous driving controller for articulated bus using model predictive control algorithm with inner model[J]. Int’l J Autom Tech, 2022, 23:357-366. |
| [12] | LU Yao, LIU Lu, Panneerselvam J, et al.CECF: A DNN-based energy-efficient cloud-edge collaboration framework for intelligent workload scheduling in 6G-enabled transportation systems[J]. IEEE Trans Intel Transport Syst, 2025, 26(10):17889-17900. |
| [13] |
WU Libing, ZHANG Rui, LI Qingan, et al.A mobile edge computing-based applications execution framework for internet of vehicles[J]. Front Comput Sci, 2022, 16:165506.
doi: 10.1007/s11704-021-0425-6 |
| [14] | TANG Lun, DAI Jun, CHENG Zhangchao, et al.A digital twins-assisted multi-autonomous vehicle distributed collaborative path planning algorithm with fidelity guarantee[J]. IEEE Trans Intel Transport Syst, 2024, 25(12):19904-19916. |
| [15] | TONG Zhao, DENG Xiaomei, YE Feng, et al.Adaptive computation offloading and resource allocation strategy in a mobile edge computing environment[J]. Info Sci (ISCI), 2020, 537:116-131. |
| [16] | ZHAO Junhui, REN Ruixing, ZOU Dan, et al.IoV-oriented integrated sensing, computation, and communication: System design and resource allocation[J]. IEEE Trans Vehi Tech, 2024, 73(11):16283-16294. |
| [17] | TANG Lun, WANG Asha, XIA Bingsen, et al.Research on integrated sensing, communication resource allocation, and digital twin placement based on digital twin in IoV[J]. IEEE IoT-J, 2025, 12(11):17300-17315. |
| [18] | LI Yuchen, LIANG Weifa, XU Zichuan, et al.Budget-constrained digital twin synchronization and its application on fidelity-aware queries in edge computing[J]. IEEE Trans Mobi Comput, 2025, 24(1):165-182. |
| [19] | Pandey S, Shanker U.Performance issues in scheduling of real-time transactions[C]// Int’l Conf Data Syst Advan Appl (DASFAA), 2021, 12683:638-642. |
| [20] | YANG Lun, YI Yanzhou, LI Songlin, et al.Digital twin construction and resource allocation on internet of vehicles[J]. IEEE Inte Thin J, 2025, 12(7):9091-9106. |
| [21] |
陈山枝, 葛雨明, 时岩.蜂窝车联网(C-V2X)技术发展、应用及展望[J]. 电信科学, 2022, 38(1):1-12.
doi: 10.11959/j.issn.1000-0801.2022007 |
| CHEN Shanzhi, GE Yuming, SHI Yan.Technology development, application and prospect of cellular vehicle-to-everything (C-V2X)[J]. Telecommun Sci, 2022, 38(1):1-12.(in Chinese) | |
| [22] | DONG Hairong, WU Wei, SONG Haifeng, et al.Data and model driven task offloading strategy in the dynamic mobile edge computing system[J]. J Syst Sci Compl, 2024, 37:351-368. |
| [23] |
FAN Junqiu, YAN Rujing, HE Yu, et al.Stochastic optimization of combined energy and computation task scheduling strategies of hybrid system with multi-energy storage system and data center[J]. Renew Energ, 2025, 242:122466.
doi: 10.1016/j.renene.2025.122466 URL |
| [24] | CHEN Chang, LI Xiuhong, ZHU Qianchao, et al.Centauri: Enabling efficient scheduling for communication-computation overlap in large model training via communication partitioning[C]// Proc 29th ACM Int’l Conf Arch Support Program Lang Operat Syst, Vol 3 (ASPLOS '24). Association for Computing Machinery, New York, NY, USA, 2024:178-191. |
| [25] | REN Mingyuan, FU Xiuwen, Pace P, et al.Collaborative data acquisition for UAV-aided IoT based on time-balancing scheduling[J]. IEEE IoT-J, 2024, 11(8):13660-13676. |
| [26] | CHEN Fahao, LI Pemg, PAN Shengli, et al.Giant could be tiny: Efficient inference of giant models on resource-constrained UAVs[J]. IEEE IoT-J, 2024, 11(1):21170-21179. |
| [27] |
GAO Zhenhai, YU Tong, SUN Tianjun, et al.Data filtering method for intelligent vehicle shared autonomy based on a dynamic time warping algorithm[J]. Sensors, 2022, 22(23):9436.
doi: 10.3390/s22239436 URL |
| [28] |
Hamdi W, Ksouri C, Bulut H, et al.Network slicing-based learning techniques for IoV in 5G and beyond networks[J]. IEEE Commun Surv Tutor, 2024, 26(3):1989-2047.
doi: 10.1109/COMST.2024.3372083 URL |
| [29] | Mehmeti F, Porta T F L, Kellerer W.Efficient resource allocation with provisioning constrained rate variability in cellular networks[J]. IEEE Trans Mobi Comput, 2024, 33(5):5130-5149. |
| [30] | Kahraman İ, Köse A, Koca M, et al.Age of Information in internet of things: A survey[J]. IEEE IoT-J, 2024, 11(6):9896-9914. |
| [31] | GU Dan, MA Yajie, DAN Feng, et al.A data dissemination algorithm based on maximization of causal path entropy in vehicular Ad Hoc networks[J]. IEEE IoT-J, 2024, 11(11):19736-19748. |
| [32] |
XIAO Shunyuan, GE Xiaohua, HAN Qinglong, et al.Dynamic event-triggered platooning control of automated vehicles under random communication topologies and various spacing policies[J]. IEEE Trans Cybern, 2022, 52(11):11477-11490.
doi: 10.1109/TCYB.2021.3103328 URL |
| [33] | FENG Yunqi, SHEN Hesheng, SHAN Zhendong, et al.Semantic communication for edge intelligence enabled autonomous driving system[J]. IEEE Netw, 2025, 29(2):149-157. |
| [34] | CAI Guoqiang, FAN Bo, DONG Yiwei, et al.Task-efficiency oriented V2X communications: Digital twin meets mobile edge computing[J]. IEEE Wirel Commun, 2024, 31(2):149-155. |
| [35] |
Yates R D, SUN Yin, Brown D R, et al.Age of information: An introduction and survey[J]. IEEE J Sel Area Comm, 2021, 39(5):1183-1210.
doi: 10.1109/JSAC.2021.3065072 URL |
| [36] | LIU Long, QIN Xiaoqi, CHEN Hao,et al.Information timeliness driven statistical QoS guarantee in RIS-enabled wireless networks via deep reinforcement learning[J]. IEEE IoT-J, 2024, 11(14):25185-25197. |
| [37] | QIN Xiaoqi, XIA Yangyang, LI Hang, et al.Distributed data collection in age-aware vehicular participatory sensing networks[J]. IEEE IoT-J, 2021, 8(19):14501-14513. |
| [38] |
Maatouk A, Kriouile S, Assaad M, et al.The age of incorrect information: A new performance metric for status updates[J]. IEEE/ACM Trans Netw, 2020, 28(5):2215-2228.
doi: 10.1109/TNET.90 URL |
| [39] | Nguyen N L, Yoo M.Multi-agent trajectory prediction with adaptive perception-guided transformers[J]. IET Intel Transport Syst, 2024, 18:1196-1209. |
| [40] | Souaad B-L, Fouzi S, Louiza B-M.Geographic routing protocols for vehicular Ad Hoc Networks (VANETs): A survey[J]. Vehi Commun, 2018, 11:20-31. |
| [41] |
Daw S, Kar A, Chintapalli V, et al.LAMP: A latency-aware MAC protocol for joint scheduling of CAM and DENM traffic over 5G-NR sidelink[J]. Comput Commun, 2024, 217:41-56.
doi: 10.1016/j.comcom.2024.01.011 URL |
| [42] | CHEN Rui, NING Jiameng, LEI Yu, et al.Mixed traffic flow state detection: A connected vehicles-assisted roadside radar and video data fusion scheme[J]. IEEE Open J Intel Transport Syst, 2023, 4:360-371. |
| [43] | XU Wenjun, ZHANG Yimeng, WANG Fengyu, et al.Semantic communication for the internet of vehicles: A multiuser cooperative approach[J]. IEEE Vehi Tech Mag, 2023, 18(1):100-109. |
| [44] | WAN Zhiping, LIU Shaojiang, XU Zhiming, et al.A semantic communication approach for multiscene target detection in intelligent vehicle networks[J]. IEEE IOT-J, 2024, 11(22):35877-35890. |
| [45] | LIU Yuntao, HUANG Qian, LI Rongpeng, et al.Select2Col: Leveraging spatial-temporal importance of semantic information for efficient collaborative perception[J]. IEEE Transport Vehi Tech, 2024, 73(9):12556-12569. |
| [46] | MEN Jingxuan, WANG Ning, MA Yi, et al.Spatial-temporal semantic communications for point cloud-based volumetric media[C]// ICC 2024-IEEE Int’l Conf Commun, Denver, CO, USA, 2024:4704-4710. |
| [47] | FU Jie, GAO Junyu, XU Changsheng.Learning semantic-aware spatial-temporal attention for interpretable action recognition[J]. IEEE Trans Circ Syst Vide Tech, 2022, 32(8):5213-5224. |
| [48] | LI Hongyu, CHEN Jinyu, WEI Ziyu, et al.LLaVA-ST: A multimodal large language model for fine-grained spatial-temporal understanding[C]//2025 IEEE/CVF Conf Comput Visi Patt Recog (CVPR), Nashville, TN, USA, 2025:8592-8603. |
| [49] | Kopetz H.Event-triggered versus time-triggered real-time systems[J]. Lect Note Comput Sci (LNCS), 1991, 563:87-101. |
| [50] | ZHANG Heng, PENG Chen, ZHANG Jin, et al.Event-triggered control in networked control systems: A survey[C]// Proc 2015 27th Chin Contr Deci Conf,CCDC 2015:3092-3097. |
| [51] | Aranda-Escolástico E, Abdelrahim M, Guinaldo M, et al.Design of periodic event-triggered control for polynomial systems: A delay system approach[C]// IFAC-PapersOnLine, 2017, 50(1):7887-7892. |
| [52] | DOU Yihang, XING Guansheng, MA Aohua, et al.A review of event-triggered consensus control in multi-agent systems[J]. J Contr Deci, 2025, 12(1):1-23. |
| [53] |
Heemels W P M H, Donkers M C F, Teel A R.Periodic event-triggered control for linear systems[J]. IEEE T Autom Contr, 2013, 58(4):847-861.
doi: 10.1109/TAC.2012.2220443 URL |
| [54] | GE Xiaohua, HAN Qinglong, ZHAN Xianming, et al.Distributed coordination control of multi-agent systems under intermittent sampling and communication: a comprehensive survey[J]. Sci Chin Info Sci, 2025, 68(5):151201. |
| [55] | WANG Yan, YAN Yongjun, SHEN Tong, et al.An ironment[J]. IEEE Trans Intel Vehi, 2023, 8(1):583-593. |
| [56] | LIU Jizheng, WANG Zhenpo, ZHANG Lei.Event-triggered vehicle-following control for connected and automated vehicles under nonideal vehicle-to-vehicle communications[C]// 2021 IEEE Intel Vehi Symp (IV), Nagoya, Japan, 2021:342-347. |
| [57] |
XIAO Wei, Cassandras C, Belta C.Bridging the gap between optimal trajectory planning and safety-critical control with applications to autonomous vehicles[J]. Automatica, 2021, 129:109592-109592.
doi: 10.1016/j.automatica.2021.109592 URL |
| [58] |
Fang K, Song R, Ho I.Invariant-DLIO: Direct LiDAR-inertial odometry based on invariant Kalman filtering[J]. IEEE Sens J, 2025, 25(11):20572-20583.
doi: 10.1109/JSEN.2025.3558916 URL |
| [59] | QIAN Zenghui, CHEN Ruoyang, YI Changyan, et al.Collision avoidance control for autonomous driving with multiple dynamic obstacles in IoV: A prediction-enhanced APF-based approach[J]. IEEE IoT-J, 2025, 12(13):24968-24984. |
| [60] |
Sabouni E, Cassandras C, XIAO Wei, et al.Optimal control of connected automated vehicles with event/self-triggered control barrier functions[J]. Automatica, 2024, 162:111530.
doi: 10.1016/j.automatica.2024.111530 URL |
| [61] | HAN Qiaoni, XU Chengfei, WANG Xiaocheng, et al.Dynamic event-triggered model predictive control for multiple platoons under non-ideal communications[J]. IEEE IoT-J, 2025, 12(15):29411-29426. |
| [62] | 谢光强, 杜宇凡, 陈俊宇, 等.一种基于切换拓扑和事件触发机制的一致性协议[J].计算机应用研究, 2021, 38(3):770-776. |
| XIE Guangqiang, DU Yufan, CHEN Junyu et al.Consensus protocol based on switching topology and event triggering mechanism[J]. Appl Res Comput, 2021, 38(3):770-776. | |
| [63] | XU Yong, WU Zhengguang, PAN Yajun.Observer-based dynamic event-triggered adaptive control of distributed networked systems with application to ground vehicles[J]. IEEE Trans Indu Elect, 2023, 70(4):4148-4157. |
| [64] |
YOU Renyang, LIU Quan.Reinforcement learning-based optimal tracking control for uncertain multi-agent systems with uncertain topological networks[J]. ISA Trans, 2025, 156:217-227.
doi: 10.1016/j.isatra.2024.11.043 URL |
| [65] | Hwang S, Lee H, Kim M, et al.Multiagent deep reinforce-ment learning for decentralized multi-UAV mobile edge computing networks[J]. IEEE IoT-J, 2025, 12(10):14484-14497. |
| [66] |
CHEN Chuqiao, YANG Haonan, ZHAI Chunjie, et al.Competitive pricing for ride-sourcing platforms with MARL[J]. Transport Res C-Emer, 2024, 165:104697.
doi: 10.1016/j.trc.2024.104697 URL |
| [67] | LYU Ting, XU Haitao, ZHANG Long, et al.Source selection and resource allocation in wireless-powered relay networks: An adaptive dynamic programming-based approach[J]. IEEE IoT-J, 2024, 11(5):8973-8988. |
| [68] | 刘彤.基于深度强化学习的车联网控制与通信机制优化研究[D]. 北京:北京邮电大学, 2024. |
| LIU Tong.Optimization of control and communication mechanisms for the internet of vehicles based on deep reinforcement learning[D]. Beijing:Beijing Univ. Posts and Telecommun, 2024.(in Chinese) | |
| [69] | Saad M, Jamshed M, Tariq M, et al.Knowledge-empowered distributed learning platform in internet of unmanned aerial agents to support NR-V2X communication[J]. IEEE IoT-J, 2025, 12(21):43949-43965. |
| [70] | ZHAO Liang, ZHANG Enchao, WAN Haohua, et al.MESON: A mobility-aware dependent task offloading scheme for urban vehicular edge computing[J]. IEEE Trans Mobi Comput, 2024, 23(5):4259-4272. |
| [71] | LIANG Xiaolin, LIU Qianlong, CAO Wangbin, et al.AoI minimization for RIS-assisted V2V relay system with deep reinforcement learning[J]. IEEE IoT-J, 2025, 12(14):27450-27460. |
| [72] |
SONG Shulin, ZHANG Zheng, WU Qiong, et al.Joint optimization of age of information and energy consumption in NR-V2X system based on deep reinforcement learning[J]. Sensors, 2024, 24:4338.
doi: 10.3390/s24134338 URL |
| [73] | LU Sidi, SHI Weisong.Poster: Towards efficient multilayer collaboration for CAV applications[C]//2022 IEEE/ACM 7th Symp Edge Comput (SEC), Seattle, WA, USA, 2022:305-306. |
| [74] | LUO Yichen, YAO Yongtao, CHEN Junzhou, et al.An efficient data transmission framework for connected vehicles[C]//2024 IEEE/ACM Symp Edg Comput (SEC), Rome, Italy, 2024:306-320. |
| [75] | Schulman J, Wolski F, Dhariwal P, et al.Proximal policy optimization algorithms[J]. arXiv preprint, arXiv:1707.06347, 2017. |
| [76] | 张新钰, 卢毅果, 高鑫, 等.面向智能网联汽车的车路协同感知技术及发展趋势[J].自动化学报, 2025, 51(2):233-248. |
| ZHANG Xinyu, LU Yiguo, GAO Xin, et al.Vehicle-road collaborative perception technology and development trend for intelligent connected vehicles[J]. Acta Automatica Sinica, 2025, 51(2):233-248.(in Chinese) | |
| [77] | XIAO He, LI Zhenhua, ZHAI Ennan, et al.Towards web-based delta synchronization for cloud storage services[C]// Proc 16th USENIX Conf File Stor Tech (FAST'18). USENIX Association, USA, 2018:155-168. |
| [78] | 何学洲, 陈秀法, 李玉龙, 等.基于空间数据库增量的地质图更新技术体系的构建思考[J]. 中国矿业, 2023, 32(5):75-81. |
| HE Xuezhou, CHEN Xiufa, LI Yulong, et al.Construction of geological map update technology system based on incremental spatial database[J]. Chin Mini Maga, 2023, 32(5):75-81.(in Chinese) | |
| [79] |
WANG Shufeng, WANG Zhengli, WANG Xinkai, et al.Intelligent vehicle driving decision-making model based on variational AutoEncoder network and deep reinforcement learning[J]. Expert Syst Appl, 2025, 268:126319.
doi: 10.1016/j.eswa.2024.126319 URL |
| [80] |
JUAN Zhou, ZHANG Shun, WANG Peng.Fault diagnosis for power batteries based on a stacked sparse autoencoder and a convolutional block attention capsule network[J]. Processes, 2024, 12(4):816.
doi: 10.3390/pr12040816 URL |
| [81] | LIANG Zujie, LIANG Fan.TransPCC: Towards deep point cloud compression via transformers[C]// Int’l Conf Multi Retri (ICMR '22), Newark NJ USA, 2022:1-5. |
| [82] |
GUO Zixi, ZHANG Yun, ZHU Linwei, et al.TSC-PCAC: Voxel transformer and sparse convolution-based point cloud attribute compression for 3D broadcasting[J]. IEEE Trans Broadcast, 2025, 71(1):154-166.
doi: 10.1109/TBC.2024.3464417 URL |
| [83] | HE Junyang, DENG Xiaoheng, GUI Jinsong, et al.MDNet: Multimodal cooperative perception via spatial alignment of modal decision-making[J]. IEEE IoT-J, 2025, 12(11):16142-16154. |
| [84] | Noor-A-Rahim M, LIU Z, Lee H, et al.A survey on resource allocation in vehicular networks[J]. IEEE Trans Intel Transport Syst, 2022, 23(2):701-721. |
| [85] | ZHANG Xinyi, WANG Chunyang, ZHU Yanmin, et al.Multi-agent deep reinforcement learning with trajectory prediction for task migration-assisted computation offloading[J]. IEEE Trans Mobi Comput, 2025, 24(7):5839-5856. |
| [86] | DU Jianbo, KONG Ziwen, SUN Aijing, et al.MADDPG-based joint service placement and task offloading in MEC empowered air-ground integrated networks[J]. IEEE IoT-J, 2024, 11(6):10600-10615. |
| [87] | WANG Zhibo, SUN Yunan, LIU Defang, et al.Location privacy-aware task offloading in mobile edge computing[J]. IEEE Trans Mobi Comput, 2024, 23(3):2269-2283. |
| [88] | LU Jiaheng, QU Zhenzhe, LIU Anfeng, et al.MLM-WR: A swarm-intelligence-based cloud-edge-terminal collaboration data collection scheme in the era of AioT[J]. IEEE IoT-J, 2024, 11(1):243-255. |
| [89] | HONG Zhiming, LIN Qing, HU Bo.Knowledge distillation-based edge-decision hierarchies for interactive behavior-aware planning in autonomous driving system[J]. IEEE Trans Intel Transport Syst, 2024, 25(9):11040-11057. |
| [90] | FAN Wenhao, ZHAO Liang, LIU Xun, et al.Collaborative service placement, task scheduling, and resource allocation for task offloading with edge-cloud cooperation[J]. IEEE Trans Mobi Comput, 2024, 23(1):238-256. |
| [91] | DONG Mengyuan, FU Yunchuan, LI Changle, et al.Task offloading and resource allocation in vehicular cooperative perception with integrated sensing, communication, and computation[J]. IEEE Trans Intel Transport Syst, 2025, 26(6):8481-8496. |
| [92] |
SUN Jianan, GU Qing, ZHENG Tao, et al.Joint optimiza-tion of computation offloading and task scheduling in vehicular edge computing networks[J]. IEEE Access, 2020, 8:10466-10477.
doi: 10.1109/Access.6287639 URL |
| [93] | Lee Seung-seob, Lee Sukyoung.Resource allocation for vehicular fog computing using reinforcement learning combined with heuristic information[J]. IEEE IoT-J, 2020, 7(10):10450-10464. |
| [94] | PAN Chao, WANG Zhao, LIAO Haijun, et al.Deep rein-forcement learning-based URLLC-aware task offloading in collaborative vehicular networks[J]. IEEE Trans Intel Transport Syst, 2023, 24(7):7377-7389. |
| [95] | QIN Peng, WAMG Yifei, CAI Ziyuan, et al.MADRL-based URLLC-aware task offloading for air-ground vehicular cooperative computing network[J]. IEEE Trans Intel Transport Syst, 2024, 25(7):6716-6729. |
| [96] | DAI Penglin, CHAO Yangyang, XU Xiao, et al.Context-aware offloading for edge-assisted on-device video analytics through online learning approach[J]. IEEE Trans Mobi Comput 2024, 23(12):12761-12777. |
| [97] | DUAN Wei, GU Xiaohui, WEN Miaowen, et al.Resource management for intelligent vehicular edge computing networks[J]. IEEE Trans Intel Transport Syst, 2022, 23(7):9797-9808. |
| [98] | MIN Hong, Rahmani M, Ghaderkourehpaz P, et al.A joint optimization of resource allocation management and multi-task offloading in high-mobility vehicular multi-access edge computing networks[J]. Advan Hoc Networks, 2025, 166:103656. |
| [99] |
Wiseborn D, Altilar T.UniDRM: Unified data and resource management for federated vehicular cloud computing[J]. IEEE Access, 2021, 9:157052-157067.
doi: 10.1109/ACCESS.2021.3127521 URL |
| [100] |
Rawlley O, Gupta S, Chandrakar J, et al.Artificial intelligence inspired task offloading and resource orchestration in intelligent transportation systems[J]. Cogn Comput, 2025, 17:18.
doi: 10.1007/s12559-024-10380-3 |
| [101] |
LIANG Jingyu, MA Bowen, FENG Zihan, et al.Reliability-aware task processing and offloading for data-intensive applications in edge computing[J]. IEEE Trans Netw Serv Manag, 2023, 20(4):4668-4680.
doi: 10.1109/TNSM.2023.3258191 URL |
| [102] | HU Shihong, LI Guanghui, SHI Weisong.Latency-aware and real-time scheduling framework for edge-enabled internet of vehicles[J]. IEEE T Serv Comput, 2023, 16(1):398-411. |
| [103] |
LIU Zhongjian, XU Xiaolong.Latency-aware service migration with decision theory for internet of vehicles in mobile edge computing[J]. Wirel Netw, 2024, 30(5):4261-4273.
doi: 10.1007/s11276-022-02978-y |
| [104] |
Alghamdi I, Anagnostopoulos C, Pezaros D.Data quality-aware task offloading in mobile edge computing: An optimal stopping theory approach[J]. Future Gener Comput Syst, 2021, 117:462-479.
doi: 10.1016/j.future.2020.12.017 URL |
| [105] | MA Mulei, WU Liantao, LIU Wenxiang, et al.Data-aware hierarchical federated learning via task offloading[C]// Glob 2022-2022 IEEE Glob Commun Conf, Rio de Janeiro, Brazil, 2022:3011-3016. |
| [106] |
Mohammad A, Al-Hawary S, Hindieh A, et al.Intelligent data-driven task offloading framework for internet of vehicles using edge computing and reinforcement learning[J]. Data Metadata, 2025, 4:521.
doi: 10.56294/dm2025521 URL |
| [107] | Hawlader F, Robinet F, Elghazaly G, et al.Cloud-assisted 360-degree 3D perception for autonomous vehicles using V2X communication and hybrid computing[C]//Wire Dema Netw Syst Serv, Hintertux, Zillertal, Tyrol, Austria, 2025:1-8. |
| [108] | XIAO Zhu, DAI Xingxia, JIANG Hongbo, et al.Vehicular task offloading via heat-aware MEC cooperation using game-theoretic method[J]. IEEE IoT-J, 2020, 7(3):2038-2052. |
| [109] | CHEN Yishan, WU Jie, HAN Junxiao, et al.A game-theoretic approach based task offloading and resource pricing method for idle vehicle devices assisted VEC[J]. IEEE IoT-J, 2024, 11(12):21954-21969. |
| [110] | LIU Jianhua, WEI Jincheng, LUO Rongxin, et al.Computation offloading in edge computing for internet of vehicles via game theory[J]. CMC-Comput Mater Cont, 2024, 81(1):1337-1361. |
| [111] |
WANG Tong, YOU Chuanchuan.Distributed user association and computation offloading in UAV-assisted mobile edge computing systems[J]. IEEE Access, 2024, 12:63548-63567.
doi: 10.1109/ACCESS.2024.3396471 URL |
| [112] | HUANG Mengting, ZHANG Wenqian, ZHANG Guanglin.Joint service placement and task offloading in vehicle-edge-cloud collaborative networks[J]. IEEE Trans Intel Transport Syst, 2025, 26:20577-20591. |
| [113] | Hortelano D, De Miguel I, Durán Barroso R, et al.A comprehensive survey on reinforcement-learning-based computation offloading techniques in edge computing systems[J]. J Netw Comput, 2023, 216:103669. |
| [114] | Bibi M, Syed A, Jung H, et al.DRL-driven dual-stage resource optimization strategy for efficient computational offloading in MEC-enabled vehicular networks[J]. IEEE Trans Vehi Tech, 2025, 74(9):14591-14605. |
| [115] |
DU Jianbo, XU Jiao, SUN Aijing, et al.Profit maximization for multi-time-scale hierarchical DRL-based joint optimi-zation in MEC-enabled air-ground integrated networks[J]. IEEE Trans Commun, 2025, 73(3):1591-1606.
doi: 10.1109/TCOMM.2024.3454702 URL |
| [116] |
ZOU Junfeng, HAO Tongbo, YU Chen, et al.A3C-DO: A regional resource scheduling framework based on deep reinforcement learning in edge scenario[J]. IEEE T Comput, 2021, 70:228-239.
doi: 10.1109/TC.12 URL |
| [117] | YE Xinyu, LI Meng, SI Pengbo, et al.Collaborative and intelligent resource optimization for computing and caching in IoV with blockchain and MEC using A3C approach[J]. IEEE Trans Vehi Tech., 2023, 72(2):1449-1463. |
| [118] |
ZHU Lin, TAN Long.Task offloading scheme of vehicular cloud edge computing based on digital twin and improved A3C[J]. Internet Things, 2024, 26:101192.
doi: 10.1016/j.iot.2024.101192 URL |
| [119] | LIU Liqing, CHEN Zhichao.Joint optimization of multiuser computation offloading and wireless-caching resource allocation with linearly related requests in vehicular edge computing system[J]. IEEE IoT-J, 2024, 11(1):1534-1547. |
| [120] | XU Xiaolong, YANG Chenyi, Muhammad Bilal, et al.Computation offloading for energy and delay trade-offs with traffic flow prediction in edge computing-enabled IoV[J]. IEEE Trans Intel Transport Syst, 2023, 24(12):15613-15623. |
| [121] | CHEN Juan, XING Huanlai, XIAO Zhiwen, et al.A DRL Agent for jointly optimizing computation offloading and resource allocation in MEC[J]. IEEE IoT-J, 2021, 8(24):17508-17524. |
| [122] |
LIN Yan, XIAO Liqin, TAO Yiyu, et al.Multi-agent computing-energy-efficiency optimization in vehicular edge computing: Non-cooperative versus cooperative solutions[J]. IEEE Trans Wirel Commun, 2025, 24(7):5461-5476.
doi: 10.1109/TWC.2025.3547377 URL |
| [123] | WANG Ting, DENG Yuxiang, YANG Zhao, et al.Parameterized deep reinforcement learning with hybrid action space for edge task offloading[J]. IEEE IoT-J, 2024, 11(6):10754-10767. |
| [124] |
ZHANG Ziyang, GU Keyu, XU Zijie.DRL-based task and computational offloading for internet of vehicles in decentralized computing[J]. J Grid Comput, 2024, 22:18.
doi: 10.1007/s10723-023-09729-z |
| [125] | HUANG Xiujie, CHEN Yuhao, LIU Zhiquan, et al.Task offloading based on the fusion of model- and data-driven intelligence for vehicular edge computing networks[J]. IEEE Trans Intel Transport Syst, 2025, 26(6):8525-8540. |
| [126] |
LIU Wenshuai, LI Bin, XIE Wancheng, et al.Energy efficient computation offloading in aerial edge networks with multi-agent cooperation[J]. IEEE Trans Wirel Commun, 2023, 22(9):5725-5739.
doi: 10.1109/TWC.2023.3235997 URL |
| [127] |
ZHAO Xu, HUANG Guangqiu, JIANG Jin, et al.Task offloading of cooperative intrusion detection system based on Deep Q Network in mobile edge computing[J]. Expert Syst Appl, 2022, 206:117860.
doi: 10.1016/j.eswa.2022.117860 URL |
| [128] | LI Haofei, CHEN Chen, SHAN Hangguan, et al.Deep deterministic policy gradient-based algorithm for computation offloading in IoV[J]. IEEE Trans Intel Transport Syst, 2024, 25(3):2522-2533. |
| [129] | ZHAO Mingxiong, ZHANG Rongqian, HE Zhenli, et al.Joint optimization of trajectory, offloading, caching, and migration for UAV-assisted MEC[J]. IEEE Trans Mobi Comput, 2025, 24(3):1981-1998. |
| [130] |
CHEN Nan, WANG Miao, ZHANG Ning, et al.Energy and information management of electric vehicular network: A survey[J]. IEEE Commun Surv Tutor, 2020, 22(2):967-997.
doi: 10.1109/COMST.9739 URL |
| [131] | WANG Yunpeng, LANG Ping, TIAN Daxin, et al.A Game-based computation offloading method in vehicular multiaccess edge computing networks[J]. IEEE IoT-J, 2020, 7(6):4987-4996. |
| [132] | SUN Zemin, SUN Geng, LIU Yangheng, et al.Bargain-Match: A game theoretical approach for resource allocation and task offloading in vehicular edge computing networks[J]. IEEE Trans Mobi Comput, 2024, 23(2):1655-1673. |
| [133] |
HU Tianmeng, LUO Biao, YANG Chunhua, et al.MO-MIX: Multi-objective multi-agent cooperative decision-making with deep reinforcement learning[J]. IEEE Trans Patt Anal Mach Intel, 2023, 45(10):12098-12112.
doi: 10.1109/TPAMI.2023.3283537 URL |
| [134] | XUE Tong, ZHANG Haixia, DING Hui,et al.Energy efficiency-oriented joint communication and computation resource management in NOMA-enabled V2X underlaid cellular networks[J]. IEEE Trans Vehi Tech, 2024, 73(6):9137-9141. |
| [135] | Tran T, Pompili D.Joint task offloading and resource allocation for multi-server mobile-edge computing networks[J]. IEEE Trans Vehi Tech, 2019, 68(1):856-868. |
| [136] | HE Xiaoming, LU Haodong, DU Miao, et al.QoE-based task offloading with deep reinforcement learning in edge-enabled internet of vehicles[J]. IEEE Trans Intel Transport Syst, 2021, 22(4):2252-2261. |
| [137] | CHEN Jiayi, KUANG Zhufang, ZHANG Yuhao, et al.Blockchain-enabled computing offloading and resource allocation in multi-UAVs MEC network: A stackelberg game learning approach[J]. IEEE Trans Info Fore Secur, 2025, 20:3632-3645. |
| [138] | Byeon J, CHA Hyunrok, Hwang M, et al.Offload Scale optimization aided SLAM using reinforcement learning for digital twin[C]// 2024 24th Int’l Conf Contr, Auto Syst (ICCAS), Jeju, Korea, 2024:556-561. |
| [139] | CHEN Yishan, HAN Junxiao, ZHAO HAnliang, et al.A game-theoretic approach based task offloading and resource pricing method for idle vehicle devices assisted VEC[J]. IEEE IoT-J, 2024, 11(12):21954-21969. |
| [140] | LI Yangchen, ZHAO Lingzhi, WANG Tianle, et al.Know-ledge-and model-driven deep reinforcement learning for efficient federated edge learning: Single-and multi-agent frameworks[J]. IEEE T Mach Learn Commun Netw, 2025, 3:332-352. |
| [141] |
Doostmohammadian M, Aghasi A, Pirani M, et al.Survey of distributed algorithms for resource allocation over multi-agent systems[J]. Annu Rev Contr, 2025, 59:100983.
doi: 10.1016/j.arcontrol.2024.100983 URL |
| [142] |
TU Chengyi, D’odorico P, LI Zhe, et al.The emergence of cooperation from shared goals in the governance of common-pool resources[J]. Nat Sustain, 2023, 6:139-147.
doi: 10.1038/s41893-022-01008-1 |
| [143] | Shapley L. 17. A value for n-person games[A]//Kuhn W H, Tucker W A. Contribut Theo Games, Vol II.Princeton:Princeton University Press, 1953:307-318. |
| [144] |
Hardin G.The tragedy of the commons[J]. Science, 1968, 162:1243-1248.
pmid: 5699198 |
| [145] | Ostrom E.A Behavioral approach to the rational choice theory of collective action presidential address, American Political Science Association, 1997[J]. Am Polit Sci Re (APSR), 1998, 92(1):1-22. |
| [146] |
Helbing D, YU Wenjian, Rauhut H.Self-organization and emergence in social systems: Modeling the coevolution of social environments and cooperative behavior[J]. J Math Soci, 2011, 35(1-3):177-208.
doi: 10.1080/0022250X.2010.532258 URL |
| [147] |
Randall D.Meta-Rules: Reasoning about control[J]. Artif Intel, 1980, 15:179-222.
doi: 10.1016/0004-3702(80)90043-0 URL |
| [148] |
Lim W, Luong N, Hoang D, et al.Federated learning in mobile edge networks: A comprehensive survey[J]. IEEE Commun Surv Tutor, 2020, 22(3):2031-2063.
doi: 10.1109/COMST.9739 URL |
| [149] | TANG Yu, YAN Jiawen, Chakraborty C, et al.Hedera: A permissionless and scalable hybrid blockchain consensus algorithm in multiaccess edge computing for IoT[J]. IEEE IoT-J, 2023, 10(24):21187-21202. |
| [150] | Talpur A, Gurusamy M.Adversarial attacks against deep reinforcement learning framework in internet of vehicles[C]// 2021 IEEE Glob Work (GC Wkshps), Madrid, Spain, 2021:1-6. |
| [151] |
Iyenghar P, Gracic E, Pawelke G.A systematic approach to enhancing ISO 26262 with machine learning-specific life cycle phases and testing methods[J]. IEEE Access, 2024, 12:179600-179627.
doi: 10.1109/ACCESS.2024.3506333 URL |
| [152] | Mirzarazi F, Danishvar S, Mousavi A.The safety risks of ai-driven solutions in autonomous road vehicles[J]. World Electr. Veh. J, 2024, 15(10):438. |
| [153] | Renda A, Ducange P, Marcelloni F, et al.Federated learning of explainable AI models in 6G systems: Towards secure and automated vehicle networking[J]. Info, 2022, 13(8):395. |
| [154] | Kuznietsov A, Gyevnar B, WANG Cheng, et al.Explainable AI for safe and trustworthy autonomous driving: A systematic review[J]. IEEE Trans Intel Transport Syst, 2024, 25(12):19342-19364. |
| [155] | Gupta P, Coleman D, Siegel J.Towards physically adver-sarial intelligent networks (PAINs) for safer self-driving[J]. IEEE Contr Syst Lett, 2023, 7:1063-1068. |
| [156] | Koopman P, Wagner M.Autonomous vehicle safety: An interdisciplinary challenge[J]. IEEE Intel Transport Syst Maga, 2017, 9(1):90-96. |
| [157] |
LIU Henry X, FENG Shou.Curse of rarity for autonomous vehicles[J]. Nat Commun, 2024,15: 4808.
doi: 10.1038/s41467-024-49194-0 pmid: 38839817 |
| [158] |
LI Jie, TAO Letian, ZOU Wenjun, et al.Towards robust motion control in multi-source uncertain scenarios by robust policy iteration[J]. Commun Transp Res, 2025, 5:100191.
doi: 10.1016/j.commtr.2025.100191 URL |
| [159] | 杨澜, 赵祥模, 王润民, 等.自动驾驶认知能力测试评价研究综述[J]. 汽车安全与节能学报, 2025, 16(1):1-15. |
| YANG Lan, ZHAO Xiangmo, WANG Runmin, et al.Review on testing and evaluation of cognitive abilities for autonomous vehicles[J]. J Autom Safe Energ, 2025, 16(1):1-15.(in Chinese) |
| [1] | 孙航, 张路, 季国田. 智能网联汽车标准体系及重点标准研究与展望[J]. 汽车安全与节能学报, 2024, 15(6): 795-812. |
| [2] | 杨浩然, 谢辉, 宋康, 闫龙. 基于改进GAN的智能网联车CAN总线异常检测研究[J]. 汽车安全与节能学报, 2024, 15(5): 660-669. |
| [3] | 姬鹏霄, 孔伟伟, 罗禹贡, 于杰, 刘彦斌, 汪俊杰, 朱洧震, 梁伟铭. 基于多智能体一致性的多车道车辆集群编队控制[J]. 汽车安全与节能学报, 2024, 15(5): 742-752. |
| [4] | 关小魁, 胡茂彬. 智能网联汽车基于分组交替的协同合并策略[J]. 汽车安全与节能学报, 2022, 13(3): 482-488. |
| [5] | 赵万忠, 张寒, 邹松春, 徐坤豪, 刘畅. 线控转向系统控制技术综述[J]. 汽车安全与节能学报, 2021, 12(1): 18-34. |
| [6] | 李克强, 李家文, 常雪阳, 高博麟, 许庆, 李升波. 智能网联汽车云控系统原理及其典型应用[J]. 汽车安全与节能学报, 2020, 11(3): 261-275. |
| [7] | 赵福全,刘宗巍,郝 瀚,等. 汽车产业变革的特征、趋势与机遇[J]. JASE, 2018, 9(3): 233-249. |
| [8] | 李克强,戴一凡,李升波,边明远. 智能网联汽车( ICV ) 技术的发展现状及趋势[J]. JASE, 2017, 08(01): 1-14. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||