欢迎访问《汽车安全与节能学报》,
汽车安全与节能学报 ›› 2023, Vol. 14 ›› Issue (2): 191-201.DOI: 10.3969/j.issn.1674-8484.2023.02.006
修国涛( ), 谢辉(), 宋康, 毕凤荣
), 谢辉(), 宋康, 毕凤荣
收稿日期:2022-05-09
修回日期:2022-11-18
出版日期:2023-04-30
发布日期:2023-04-27
通讯作者:
谢辉
作者简介:*谢辉,教授。E-mail:xiehui@tju.edu.cn。基金资助:
XIU Guotao(), XIE Hui(), SONG Kang, BI Fengrong
Received:2022-05-09
Revised:2022-11-18
Online:2023-04-30
Published:2023-04-27
Contact:
XIE Hui
摘要:
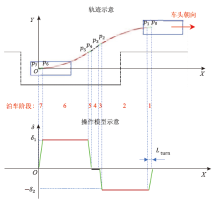
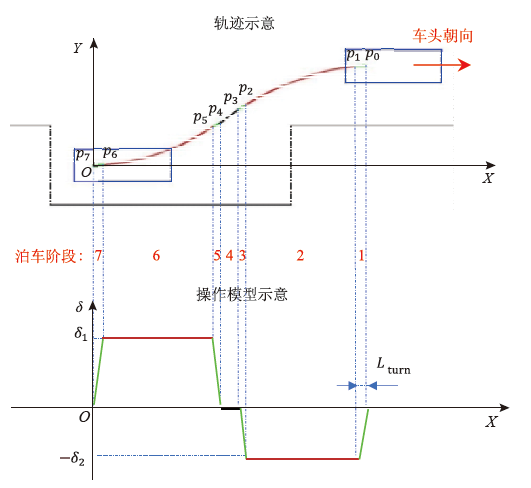
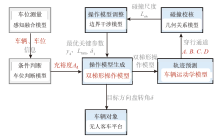
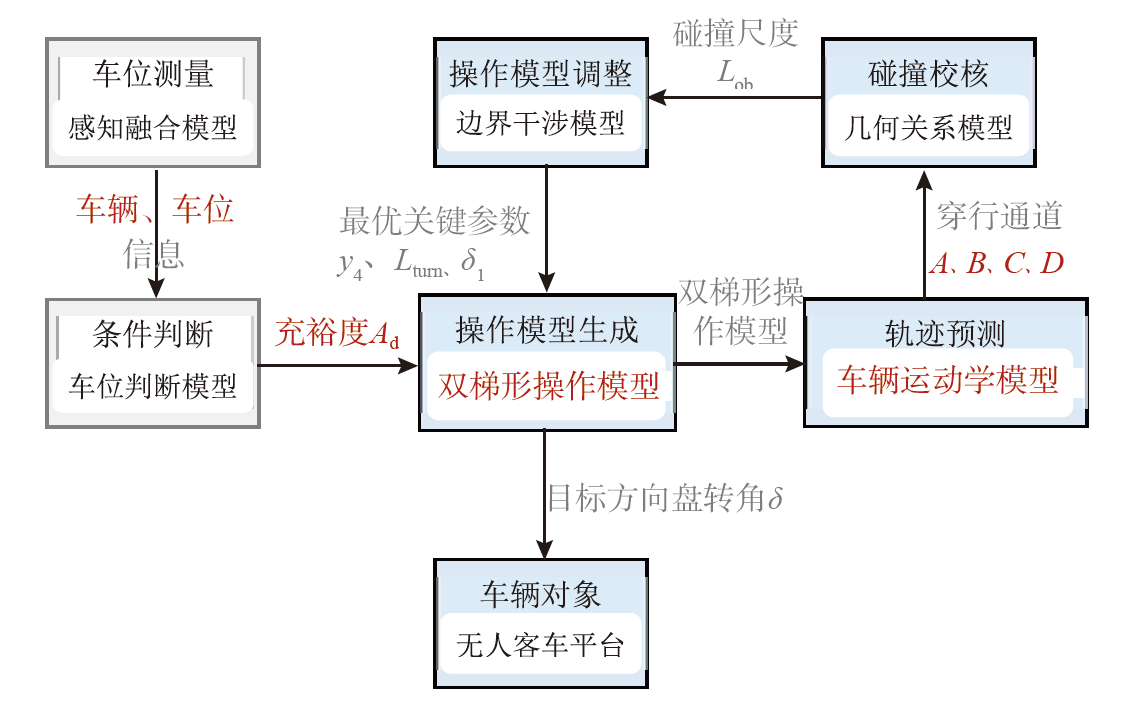
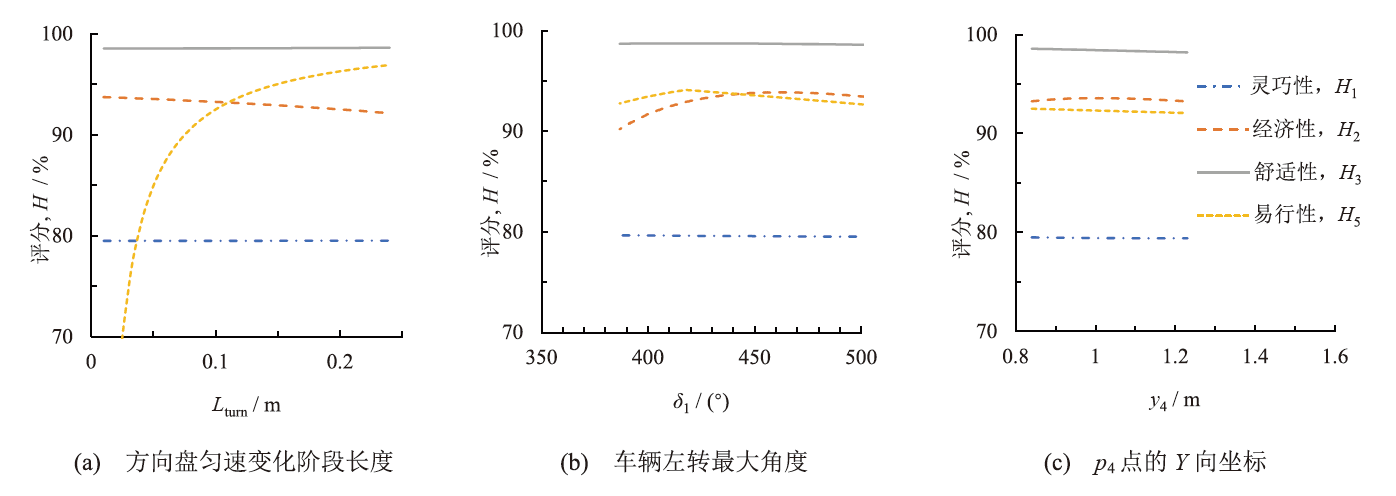
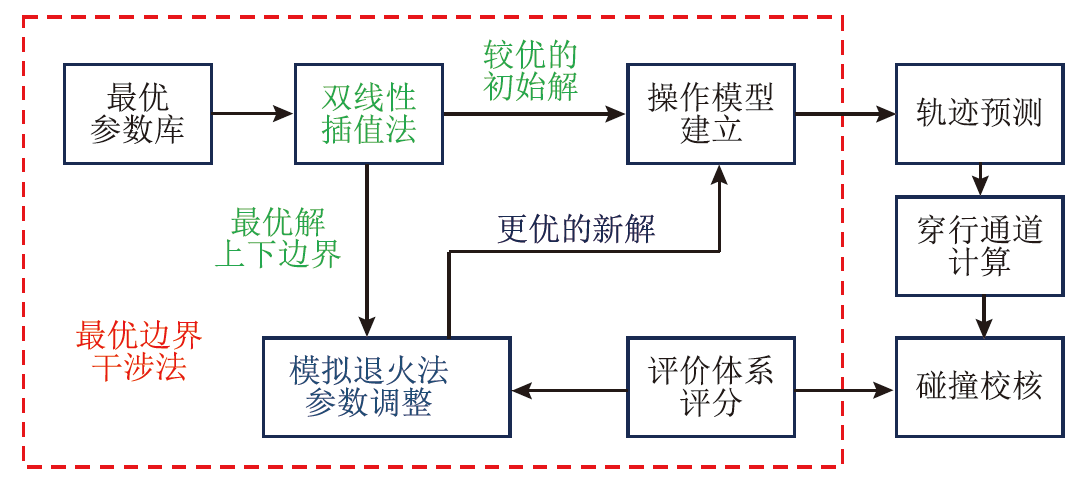
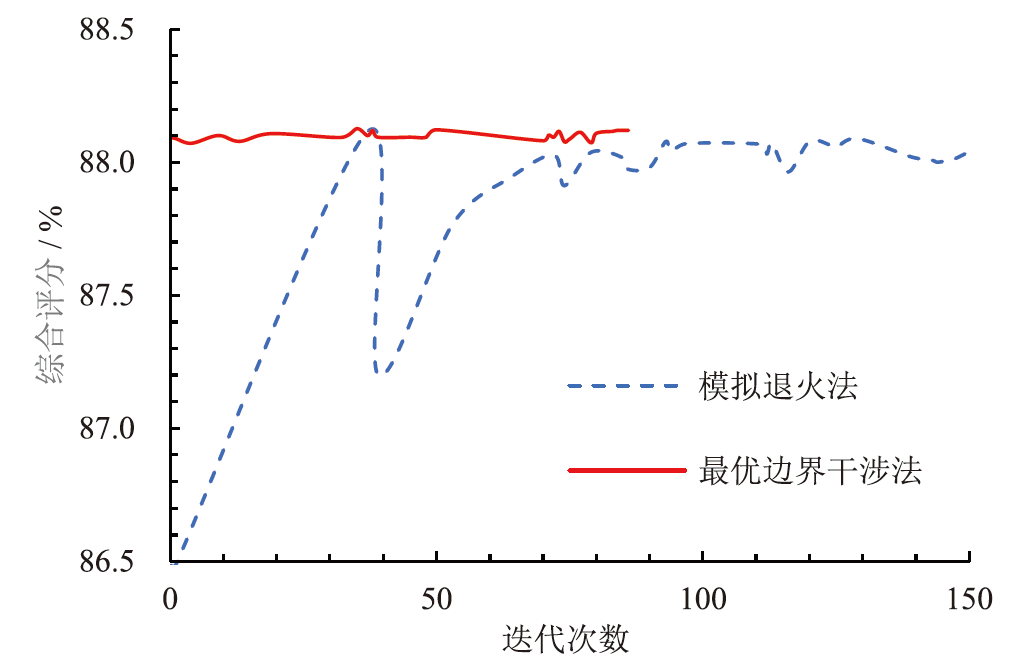
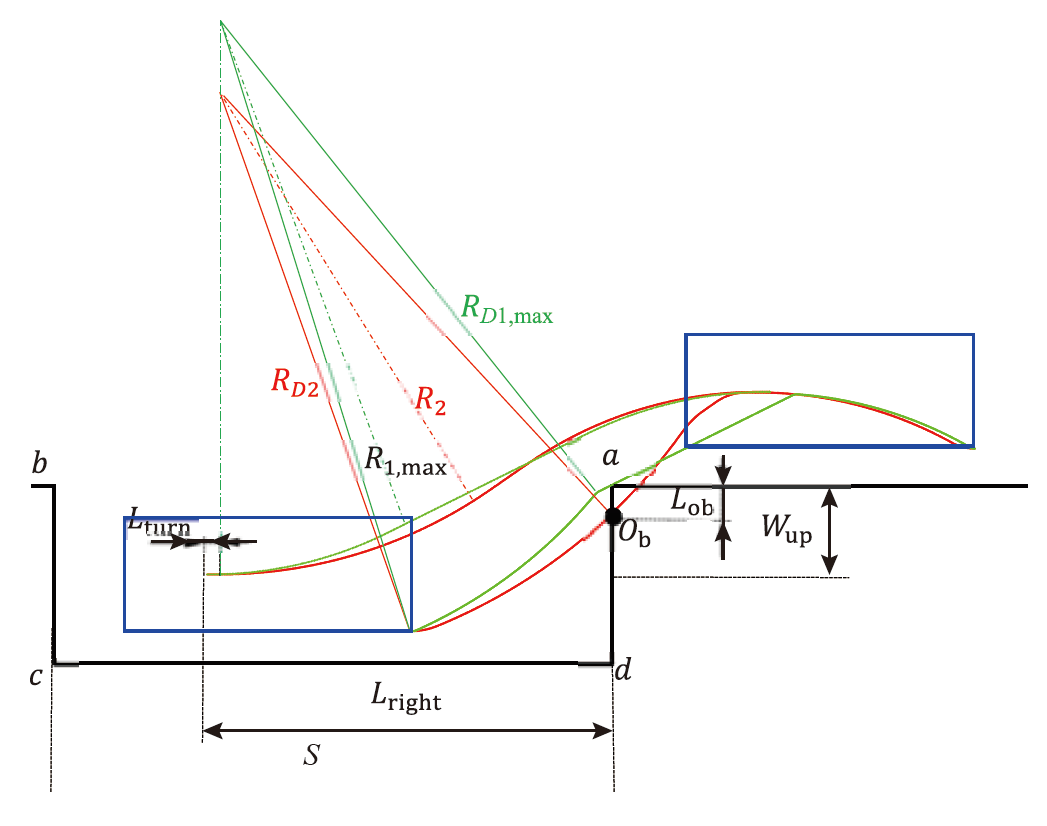
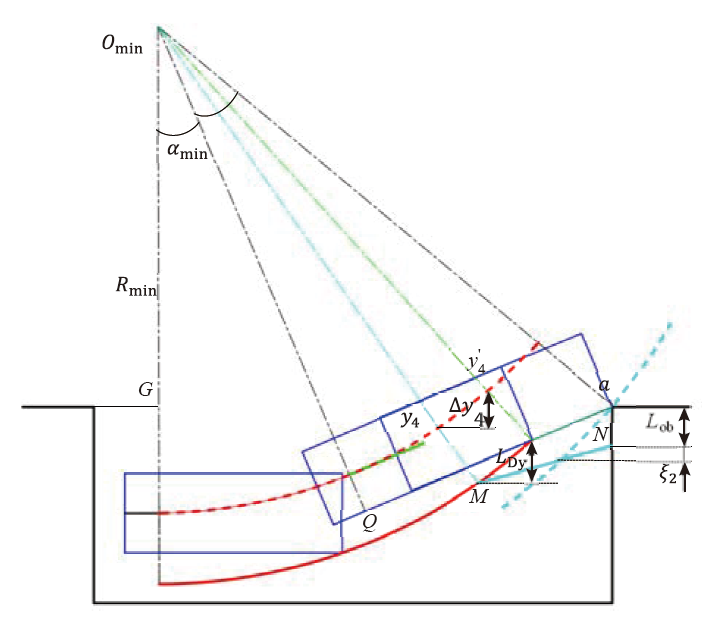
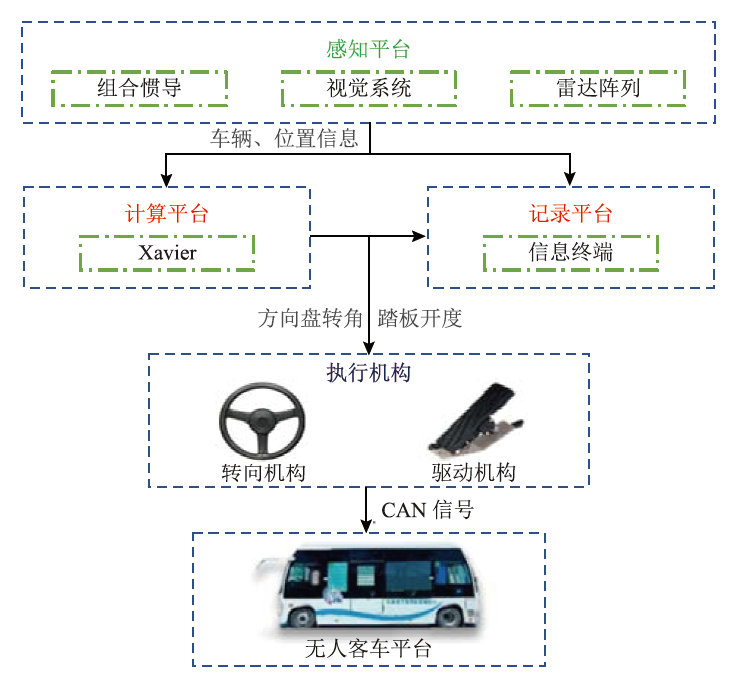
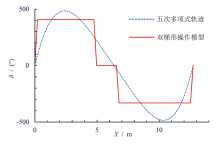
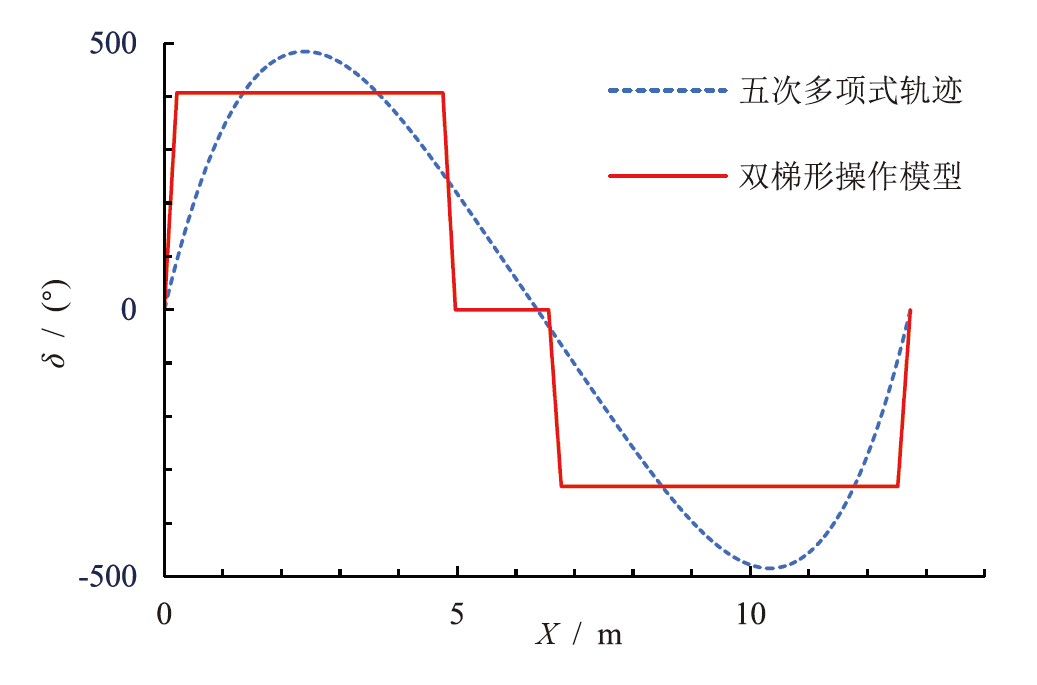
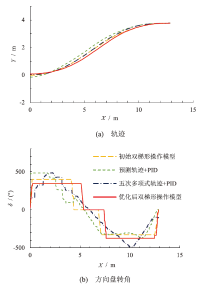
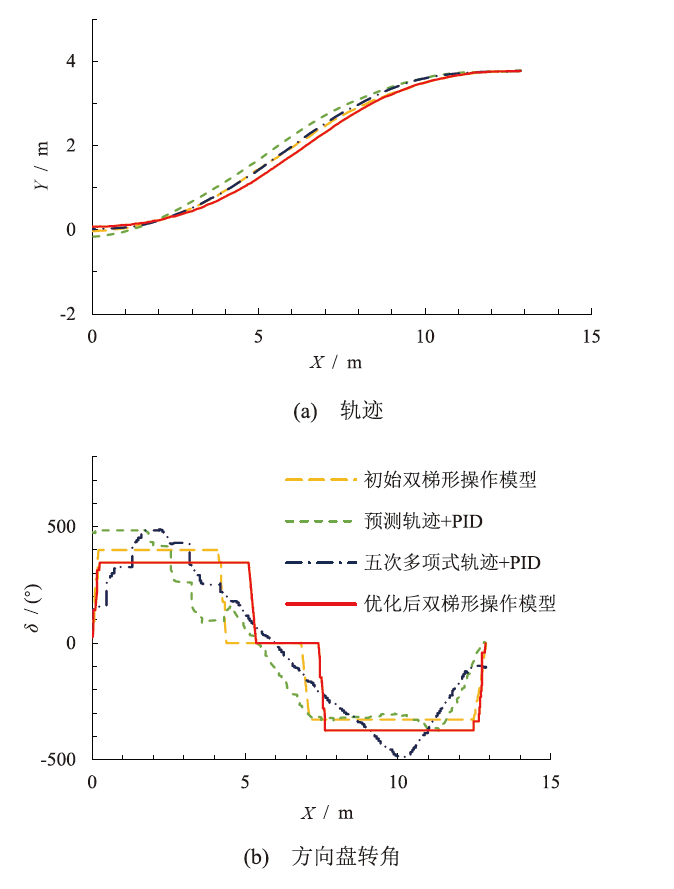
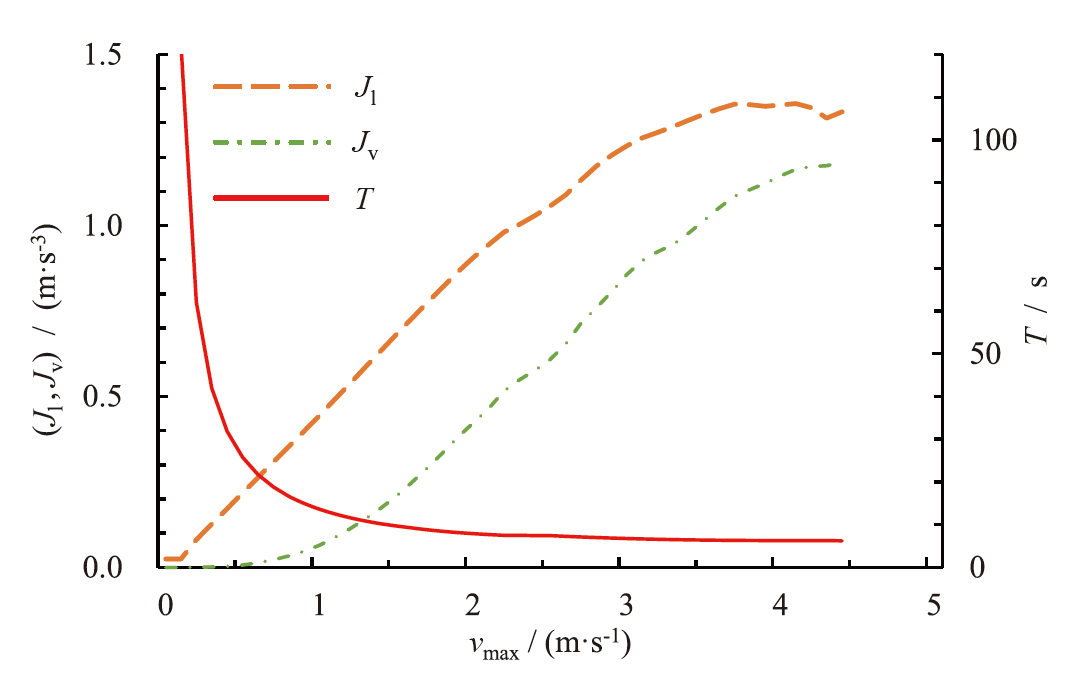
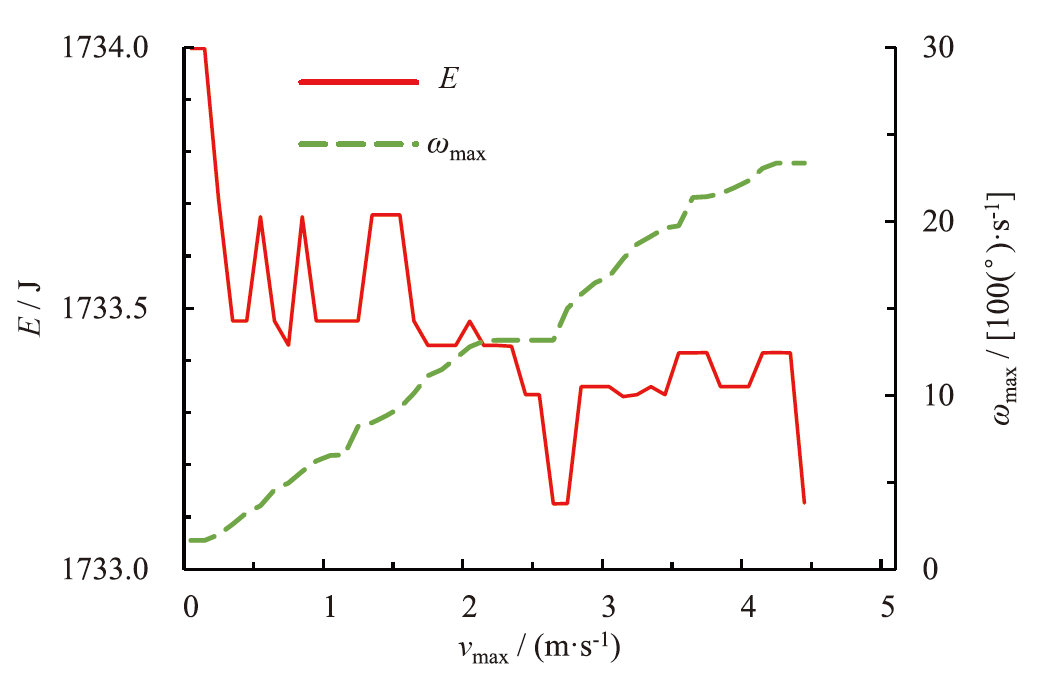
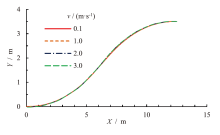
提出了一种充分融合驾驶员经验的、低能耗的无人驾驶车辆平行泊车操作模型。将驾驶员平行泊车经验,描述为双梯形曲线图像的方向盘转角操作模型;对模型轨迹关键点位上的3个构型参数,建立平行泊车品质评价体系,得出参数对泊车品质的影响规律;考虑车辆运动学约束以及无碰撞约束,实现双梯形操作模型的优化与校正。在一辆6.6 m的无人驾驶客车上,进行了不同算法的对比验证,并在不同变量条件下进行了适应性验证。结果表明:相比传统的五次多项式轨迹规划和比例—积分—微分控制的泊车方法,用本操作模型,省去了循迹环节,使泊车过程更加流畅,且能耗降低达44.7%。
中图分类号:
修国涛, 谢辉, 宋康, 毕凤荣. 基于驾驶员经验的无人驾驶车辆平行泊车操作模型[J]. 汽车安全与节能学报, 2023, 14(2): 191-201.
XIU Guotao, XIE Hui, SONG Kang, BI Fengrong. Parallel parking operation model for driverless vehicles based on driver experiences[J]. Journal of Automotive Safety and Energy, 2023, 14(2): 191-201.

| 泊车算法 | 实时计 算耗时, Ttc / ms | 总耗时, Ttot / s | 总路程, St / m | 误差, ε / mm | 航向误差, εθ / mrad | 总能耗, E / kJ | 加加速度, Jv /(m·s-3) | 碰撞尺度, Lob / m | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 纵向 | 横向 | 纵向 | 横向 | |||||||
| 初始双梯形操作模型 | 0.879 | 13.21 | 13.72 | 6.2 | 28.9 | 8.5 | 1.913 | 2.79 | 3.68 | -0.78 |
| 预测轨迹+PID | 1.186 | 13.44 | 13.76 | -94.5 | 147.2 | 53.1 | 3.372 | 25.69 | 54.86 | -1.07 |
| 五次多项式轨迹+PID | 1.227 | 13.45 | 13.78 | -81.6 | 17.8 | -3.8 | 3.414 | 25.27 | 58.46 | -0.65 |
| 优化后双梯形操作模型 | 0.876 | 13.18 | 13.68 | -16.1 | 27.3 | -24.3 | 1.888 | 3.03 | 6.65 | -0.03 |
| 泊车算法 | 实时计 算耗时, Ttc / ms | 总耗时, Ttot / s | 总路程, St / m | 误差, ε / mm | 航向误差, εθ / mrad | 总能耗, E / kJ | 加加速度, Jv /(m·s-3) | 碰撞尺度, Lob / m | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 纵向 | 横向 | 纵向 | 横向 | |||||||
| 初始双梯形操作模型 | 0.879 | 13.21 | 13.72 | 6.2 | 28.9 | 8.5 | 1.913 | 2.79 | 3.68 | -0.78 |
| 预测轨迹+PID | 1.186 | 13.44 | 13.76 | -94.5 | 147.2 | 53.1 | 3.372 | 25.69 | 54.86 | -1.07 |
| 五次多项式轨迹+PID | 1.227 | 13.45 | 13.78 | -81.6 | 17.8 | -3.8 | 3.414 | 25.27 | 58.46 | -0.65 |
| 优化后双梯形操作模型 | 0.876 | 13.18 | 13.68 | -16.1 | 27.3 | -24.3 | 1.888 | 3.03 | 6.65 | -0.03 |
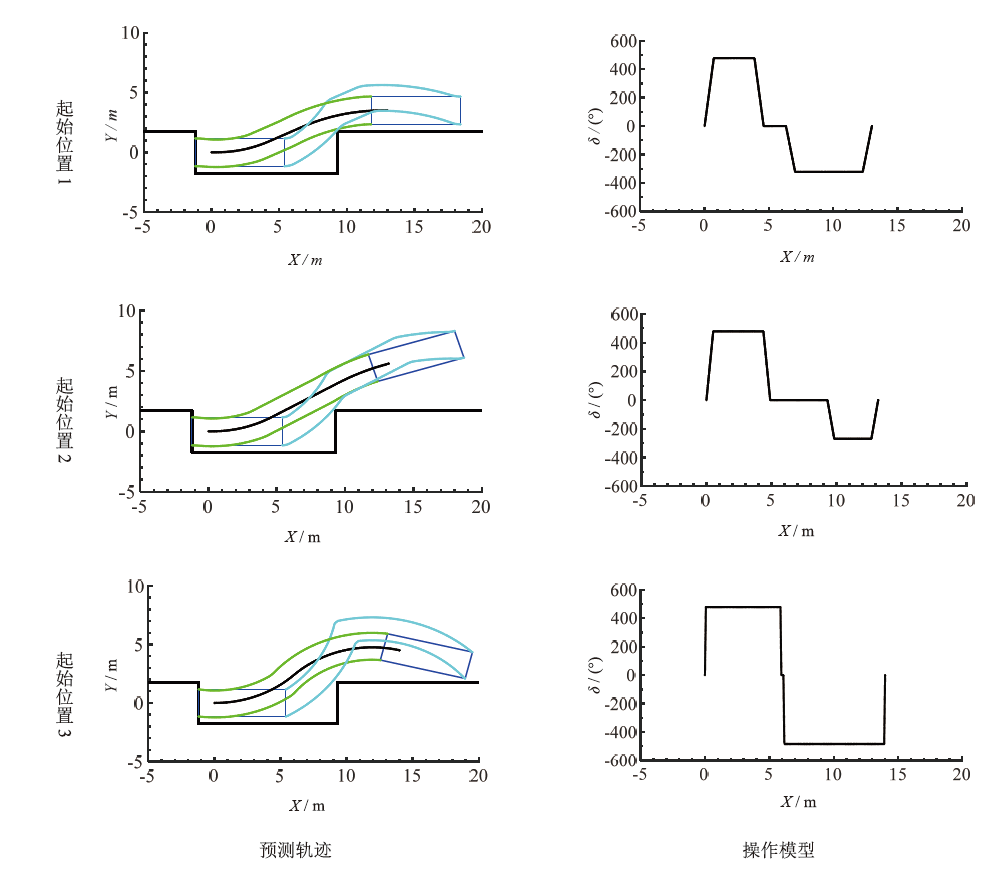
| 起始位置 | 起点 | 总评分,H / % | 总耗时,Ttot / s | 总能耗,E / kJ | 碰撞尺度,Lob / m | ||
|---|---|---|---|---|---|---|---|
| x / m | y / m | θ / mrad | |||||
| 1 | 13.0 | 3.5 | 0 | 86.85 | 13.63 | 1.160 | -0.118 |
| 2 | 13.2 | 5.6 | 300 | 85.30 | 14.51 | 1.121 | -0.258 |
| 3 | 18.0 | 4.5 | -240 | 80.13 | 15.25 | 1.555 | -0.594 |
| 起始位置 | 起点 | 总评分,H / % | 总耗时,Ttot / s | 总能耗,E / kJ | 碰撞尺度,Lob / m | ||
|---|---|---|---|---|---|---|---|
| x / m | y / m | θ / mrad | |||||
| 1 | 13.0 | 3.5 | 0 | 86.85 | 13.63 | 1.160 | -0.118 |
| 2 | 13.2 | 5.6 | 300 | 85.30 | 14.51 | 1.121 | -0.258 |
| 3 | 18.0 | 4.5 | -240 | 80.13 | 15.25 | 1.555 | -0.594 |
| [1] | Parmar J, Das P, Dave S M. Study on demand and characteristics of parking system in urban areas: A review[J]. J Traff Transp Eng, 2019, 7(1): 111-124. |
| [2] |
ZHANG Jiaxu, SHI Zhengtang, YANG Xiong, et al. Trajectory planning and tracking control for autonomous parallel parking of a non-holonomic vehicle[J]. Meas Control, 2020, 53(9-10): 1800-1816.
doi: 10.1177/0020294020944961 URL |
| [3] | ZHANG Bingzhan, LI Zhiyuan, NI Yaoyao, et al. Research on path planning and tracking control of automatic parking system[J]. World Elec Vehi J, 2022, 13(1): 14-26. |
| [4] |
Jhang J H, Lian F L. An autonomous parking system of optimally integrating bidirectional rapidly-exploring random trees* and parking-oriented model predictive control[J]. IEEE Access, 2020, 8(1): 163502-163523.
doi: 10.1109/ACCESS.2020.3020859 URL |
| [5] |
LIU Wei, LI Zhiheng, LI Li, et al. Parking like a human: a direct trajectory planning solution[J]. IEEE Trans Intel Transp Syst, 2017, 18(12): 3388-3397.
doi: 10.1109/TITS.2017.2687047 URL |
| [6] |
ZHANG Jiren, CHEN Hui, SONG Shaoyu, et al. Reinforcement Learning-Based Motion Planning for Automatic Parking System[J]. IEEE Access, 2020, 8(1): 154485-154501.
doi: 10.1109/Access.6287639 URL |
| [7] | Ján C. Automatic parking control using fuzzy logic[C]// 2019 6th Int’l Conf Adv Contr Circuits Syst (ACCS) & 2019 5th Int’l Conf New Paradigms in Electr Info Tech(PEIT), 2019: 203-208. |
| [8] | 刘颂, 陈慧, 张继仁. 神经网络借鉴驾驶员经验的自动泊车运动规划[J]. 中国集成电路, 2019, 28(Z1): 57-64. |
| LIU Song, CHEN Hui, ZHANG Jiren. Automatic parking motion planning based on neural network learning form drivers’ experience[J]. Chin Integ Circuit, 2019, 28(Z1): 57-64. (in Chinese) | |
| [9] | Martin A, Lattarulo R, Zubizarreta A, et al. Trajectory planning for automated buses in parking areas[C]// 2021 25th Int’l Conf Syst Theory, Contr Comput(ICSTCC), 2021: 688-694. |
| [10] | LI Jing, WU Qingbin, WANG Junzheng, et al. Neural networks-based sliding mode tracking control for the four wheel-legged robot under uncertain interaction[J]. Int’l J Robust Nonli Control, 2021, 31(9): 4306-4323. |
| [11] | XIE Hui, ZHANG Ze, SONG Kang. A self-optimization algorithm of multi-style smart parking driven by experience, knowledge and data[C]// 2021 5th CAA Int’l Conf Vehi Contr Intell (CVCI), 2021: 1-7. |
| [12] | Furukawa T, Lavis B, Durrant-Whyte H. Parallel grid-based recursive Bayesian estimation using GPU for real-time autonomous navigation[C]// 2010 IEEE Int’l Conf Robot Automa, 2010: 316-321. |
| [13] | 周扬, 谢辉, 肖蓬勃, 等. 基于主动优化的无人驾驶客车实时性运动规划算法[J]. 汽车安全与节能学报, 2020, 11(4): 476. |
| ZHOU Yang, XIE Hui, XIAO Pengbo, et al. Real-time motion planning algorithm for autonomous bus based on initiative optimization[J]. J Automo Safet Energ, 2020, 11(4): 476. (in Chinese) | |
| [14] |
Maekawa T, Noda T, Tamura S, et al. Curvature continuous path generation for autonomous vehicle using B-spline curves[J]. Compu Aided Design, 2010, 42(4): 350-359.
doi: 10.1016/j.cad.2009.12.007 URL |
| [15] | Philip A K, Sackey M, Owusu-Ansah P, et al. Automatic parking control algorithms and simulation research based on fuzzy controller[R]. SAE Tech Paper, 2020-01-0135. |
| [16] | DONG Hangrui, JIN Shangtai, HOU Zhongsheng. Model free adaptive control for automatic car parking systems[C]// Proc 11th World Cong Intell Contr Automa, 2014: 1769-1774. |
| [1] | 冯耀, 景首才, 惠飞, 赵祥模, 刘建蓓. 基于深度强化学习的智能网联车辆换道轨迹规划方法[J]. 汽车安全与节能学报, 2022, 13(4): 705-717. |
| [2] | 徐进, 张玉, 戴振华, 李飞, 陈坚. 人类自然驾驶状态下车辆轨迹摆动特性与车道宽度[J]. 汽车安全与节能学报, 2022, 13(4): 718-728. |
| [3] | 孙智威, 裴晓飞, 刘一平, 雍成昊, 陈词. 无人驾驶清扫车的路径跟踪及远程控制[J]. 汽车安全与节能学报, 2022, 13(4): 729-737. |
| [4] | 张平, 陈一凡, 江书真, 韩毅. 高速公路上自动超车过程的轨迹规划与跟踪控制[J]. 汽车安全与节能学报, 2022, 13(3): 463-472. |
| [5] | 郝璐璐, 谢辉, 宋康, 闫龙. 基于边缘计算的交叉路口无人驾驶车辆通行轨迹预测算法[J]. 汽车安全与节能学报, 2021, 12(2): 163-172. |
| [6] | 杨林,胡艳青,闫斌. 基于行驶工况的插电式混合动力汽车电能消耗最优控制[J]. JASE, 2017, 08(01): 87-96. |
| [7] | 胡敬文. 汽车后排乘员保护——回顾与展望( 英文)[J]. JASE, 2016, 07(04): 339-354. |
| [8] | 李作进,李仁杰,李升波,王文军,成波. 基于方向盘转角近似熵与复杂度的驾驶人疲劳状态识别[J]. JASE, 2016, 07(03): 279-284. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||